用于自动驾驶的障碍物决策方法和系统与流程
本技术一般涉及自动驾驶领域,尤其涉及一种用于自动驾驶的障碍物决策方法和系统。
背景技术:
1、当今汽车行业处在一个变革的时代,自动驾驶技术俨然已经成为智能汽车的核心技术之一,是未来解决交通出行的重要方式。决策规划是自动驾驶的核心技术之一,主要用于在收到感知模块基于传感器输出的各类障碍物及环境信息之后对当前环境做出一定的决策,并生成一条安全、舒适、无碰撞的轨迹并提供给底层控制模块执行。
2、障碍物的决策在整个决策规划中扮演着极为重要的角色。轨迹规划算法需要保障与障碍物无碰撞,因此对障碍物的决策直接影响最终生成的轨迹。由于现实中各个模块都会存在一定的偏差,如感知模块提供障碍物的位置、尺寸与实际障碍物会有一定的误差、控制模块执行轨迹会存在一定的误差、定位模块输出自车的位置也会存在一定误差,因此生成的轨迹不能完全紧贴障碍物,必须给各个模块的误差提供一定的余量,以使得整个轨迹在实际执行时也是安全的。
3、目前主流的决策规划针对障碍物的相应策略主要包含两种方式:(1)在轨迹规划的算法上进行处理,保证规划出的轨迹和障碍物保持一定的距离,比如obca(optimization-based collision avoidance)算法可以设置规划轨迹距离障碍物的最小距离;(2)通过对自车(进行轨迹规划的车辆)进行膨胀,使用一个更大的车体模型来进行规划,从而保障与障碍物存在一定的距离。
4、上述提两种方式在某些场景下(比如出库场景下)都会存在一定的缺陷。对于方式(1),在出库阶段由于经常出现左右两车紧贴自车的场景,此时若采用一个较大的最小距离参数进行轨迹规划,则会非常容易出现规划失败的情况。对于方式(2),在车体膨胀的情况下为了保证无碰撞,规划出的轨迹会在库位内出库时频繁地打方向,使得乘坐体验感较差,容易使乘车人产生即将剐蹭到旁边车辆的感觉,并且规划出的轨迹和实际开车的轨迹存在一定偏差。
5、有鉴于此,本技术提出了一种用于自动驾驶的障碍物决策方法和系统,以解决现有技术中存在的上述缺陷。
技术实现思路
1、以下给出一个或多个方面的简要概述以提供对这些方面的基本理解。此概述不是所有构想到的方面的详尽综览,并且既非旨在标识出所有方面的关键性或决定性要素亦非试图界定任何或所有方面的范围。其唯一的目的是以简化形式给出一个或多个方面的一些概念以作为稍后给出的更详细描述之序言。
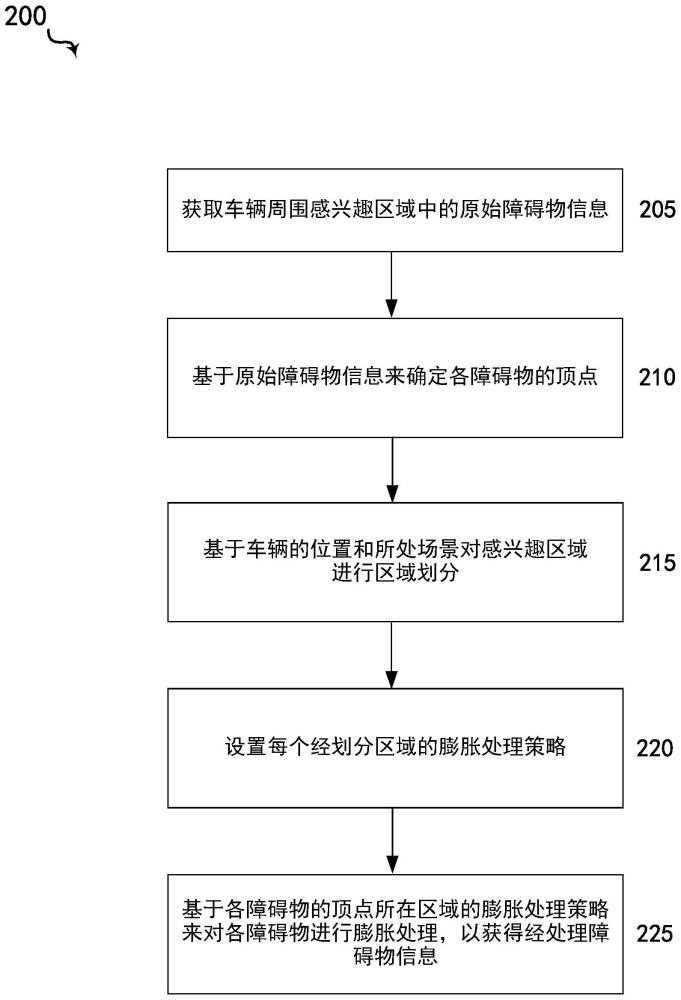
2、本技术提供了一种用于自动驾驶的障碍物决策方法,包括:获取车辆周围感兴趣区域中的原始障碍物信息;基于该原始障碍物信息来确定各障碍物的顶点;基于该车辆的位置和所处场景对该感兴趣区域进行区域划分;设置每个经划分区域的膨胀处理策略;以及基于各障碍物的顶点所在区域的膨胀处理策略来对各障碍物进行膨胀处理,以获得经处理障碍物信息。
3、在一些实施例中,基于该原始障碍物信息来确定各障碍物的顶点进一步包括:基于该原始障碍物信息获得各障碍物的原始边界;对每个障碍物的原始边界进行处理以将该原始边界转换为矩形边界;以及提取各障碍物的矩形边界的顶点作为相应障碍物的顶点。
4、在一些实施例中,基于各障碍物的顶点所在区域的膨胀处理策略来对各障碍物进行膨胀处理进一步包括:基于各障碍物的顶点所在区域的膨胀处理策略来对各障碍物的顶点进行膨胀处理。
5、在一些实施例中,该车辆的所处场景包括出库场景,并且对该感兴趣区域进行区域划分进一步包括:将该感兴趣区域划分为第一区域、第二区域和第三区域,其中该第一区域包括该感兴趣区域中位于该车辆的车头前方的区域,该第二区域包括该感兴趣区域中位于该车辆的车身两侧的区域,并且该第三区域包括该感兴趣区域中位于该车辆的车尾后方的区域。
6、在一些实施例中,设置每个经划分区域的膨胀处理策略进一步包括:为该第一区域设置第一膨胀值;为该第二区域设置第二膨胀值;以及为该第三区域设置第三膨胀值,其中,该第一膨胀值和该第三膨胀值是固定的且该第一膨胀值大于该第三膨胀值,该第二膨胀值是可变的。
7、在一些实施例中,处于该第二区域中的障碍物的顶点对应的第二膨胀值的大小同该障碍物的顶点与车头和/或车尾的距离有关。
8、在一些实施例中,处于该第二区域中的障碍物的顶点对应的第二膨胀值的大小同该障碍物的顶点与车头的距离成反比,和/或同该障碍物的顶点与车尾的距离成正比。
9、在一些实施例中,该方法进一步包括:基于该经处理障碍物信息来进行自动驾驶决策以规划出避开障碍物的轨迹。
10、本技术还提供了一种用于自动驾驶的障碍物决策系统,包括:原始信息获取模块,该原始信息获取模块被配置成获取车辆周围感兴趣区域中的原始障碍物信息;顶点确定模块,该顶点确定模块被配置成基于该原始障碍物信息来确定各障碍物的顶点;区域划分模块,该区域划分模块被配置成基于该车辆的位置和所处场景对该感兴趣区域进行区域划分;策略设置模块,该策略设置模块被配置成设置每个经划分区域的膨胀处理策略;以及膨胀处理模块,该膨胀处理模块被配置成基于各障碍物的顶点所在区域的膨胀处理策略来对各障碍物进行膨胀处理,以获得经处理障碍物信息。
11、在一些实施例中,该顶点确定模块被进一步配置成:基于该原始障碍物信息获得各障碍物的原始边界;对每个障碍物的原始边界进行处理以将该原始边界转换为矩形边界;以及提取各障碍物的矩形边界的顶点作为相应障碍物的顶点。
12、在一些实施例中,该膨胀处理模块被进一步配置成:基于各障碍物的顶点所在区域的膨胀处理策略来对各障碍物的顶点进行膨胀处理。
13、在一些实施例中,该车辆的所处场景包括出库场景,并且该区域划分模块被进一步配置成:将该感兴趣区域划分为第一区域、第二区域和第三区域,其中该第一区域包括该感兴趣区域中位于该车辆的车头前方的区域,该第二区域包括该感兴趣区域中位于该车辆的车身两侧的区域,并且该第三区域包括该感兴趣区域中位于该车辆的车尾后方的区域。
14、在一些实施例中,该策略设置模块被进一步配置成:为该第一区域设置第一膨胀值;为该第二区域设置第二膨胀值;以及为该第三区域设置第三膨胀值,其中,该第一膨胀值和该第三膨胀值是固定的且该第一膨胀值大于该第三膨胀值,该第二膨胀值是可变的。
15、在一些实施例中,处于该第二区域中的障碍物对应的第二膨胀值的大小同该障碍物的顶点与车头和/或车尾的距离有关。
16、在一些实施例中,处于该第二区域中的障碍物的顶点对应的第二膨胀值的大小同该障碍物的顶点与车头的距离成反比,和/或同该障碍物的顶点与车尾的距离成正比。
17、在一些示例中,该系统进一步包括轨迹规划模块,该轨迹规划模块被配置成基于该经处理障碍物信息来进行自动驾驶决策以规划出避开障碍物的轨迹。
18、本技术还提出了一种设备,包括处理器和存储器,该存储器存储有程序指令,该处理器运行该程序指令以实现前述用于自动驾驶的障碍物决策方法。
19、本技术的技术方案在出库场景下对障碍物进行决策处理后再进行轨迹规划,对不同区域中的障碍物采用不同的膨胀处理策略,使得规划出的轨迹更加拟人化、能够与障碍物保持合理的距离,弥补了现有轨迹规划算法在出库狭窄环境下的缺陷,并有效解决了通过膨胀自车车体容易造成出库左右打方向、造成剐蹭、以及乘车人产生恐惧感等问题,提高了轨迹的舒适性以及成功率。
- 还没有人留言评论。精彩留言会获得点赞!