行走机构的控制方法、控制系统以及电子设备与流程
本技术涉及运动控制领域,尤其涉及一种行走机构的控制方法、控制系统以及电子设备。
背景技术:
1、重型堆垛机是物流行业的重要设备。重型堆垛机的行走机构包括两个行走轮,每个行走轮由单独的电机进行驱动,控制方式为使用一台驱动器驱动两台电机进行同步控制,或者采用两台驱动器分别驱动两台电机进行直接转矩同步控制。然而,这种控制方法对重型堆垛机有一定的局限性,具体为:重型堆垛机的货物重量大,通常为20吨以上,且重型堆垛机加减速快而频繁,传统的控制方法会导致两个行走轮的扭矩不合理,加剧了行走机构的机械磨损,增加了内应力,影响设备性能和效率。
技术实现思路
1、有鉴于此,本技术提供的行走机构的控制方案,以至少部分地解决上述问题。
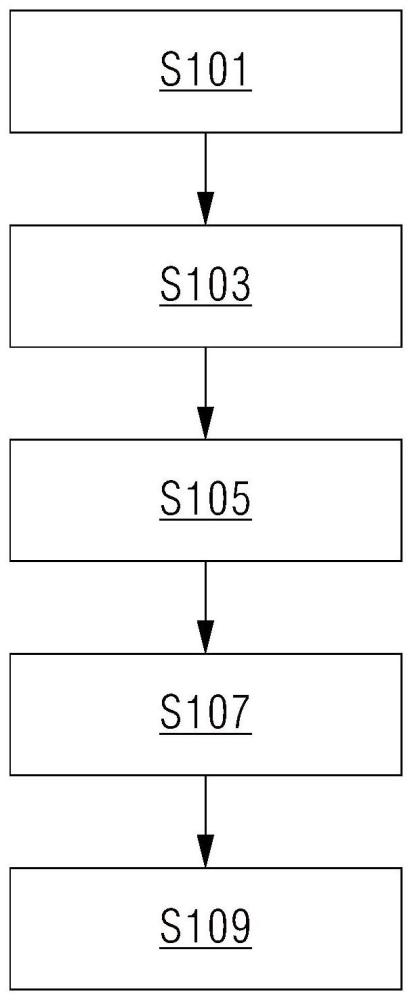
2、第一方面,本技术提供了一种行走机构的控制方法,所述行走机构包括沿第一方向间隔设置的第一行走轮和第二行走轮,所述第一行走轮由第一驱动组件驱动,所述第二行走轮由第二驱动组件驱动,所述第一驱动组件包括第一驱动器和第一电机,所述第二驱动组件包括第二驱动器和第二电机,第一驱动器被配置为位置控制模式,第二驱动器被配置为速度控制模式所述控制方法包括以下步骤:
3、获取第一驱动器的速度给定值n1set、第一行走轮的当前直径d1以及第二行走轮的当前直径d2;
4、根据第一驱动器的速度给定值n1set、第一行走轮的当前直径d1以及第二行走轮的当前直径d2,得到第二驱动器的初始速度给定值n2set_s;
5、获取第一驱动器的转矩m1以及第二驱动器的转矩m2;
6、根据所述第一驱动器的转矩m1以及第二驱动器的转矩m2的差值,得到第二驱动器的速度补偿值n2com;
7、将所述第二驱动器的初始速度给定值n2set_s与第二驱动器的速度补偿值n2com相加,将和作为第二驱动器的速度给定值n2set,第二驱动器的速度给定值n2set使第二行走轮的线速度与第一行走轮的线速度同步以及第二行走轮的转矩与第一行走轮的转矩同步。
8、可选地,根据第一驱动器的速度给定值n1set、第一行走轮的当前直径d1以及第二行走轮的当前直径d2,基于第一计算式得到第二驱动器的初始速度给定值n2set_s,所述第一计算式为:
9、n2set_s=n1set×d1÷d2
10、可选地,根据所述第一驱动器的转矩m1以及第二驱动器的转矩m2的差值,得到第二驱动器的速度补偿值n2com的步骤还包括以下子步骤:
11、获取第一行走轮与第二行走轮的中心距l以及第一行走轮与行走机构的重心沿第一方向的距离l1;
12、根据所述第一行走轮与第二行走轮的中心距l以及第一行走轮与行走机构的重心沿第一方向的距离l1,得到第一行走轮的转矩补偿系数σ1和第二行走轮的转矩补偿系数σ2;
13、将所述第一驱动器的转矩m1与第一行走轮的转矩补偿系数σ1相乘,将积作为第一补偿转矩m1com;
14、将所述第二驱动器的转矩m2与第二行走轮的转矩补偿系数σ2相乘,将积作为第二补偿转矩m2com;
15、根据所述第一补偿转矩m1com以及第二补偿转矩m2com的差值,得到第二驱动器的速度补偿值n2com。
16、可选地,根据所述第一补偿转矩m1com以及第二补偿转矩m2com的差值,得到第二驱动器的速度补偿值n2com的步骤包括以下子步骤:
17、根据所述第一补偿转矩m1com以及第二补偿转矩m2com的差值,基于pi算法得到第二驱动器的初始速度补偿值n2com_s;
18、对所述第二驱动器的初始速度补偿值n2com_s进行限幅处理,得到第二驱动器的速度补偿值n2com;
19、可选地,根据所述第一行走轮与第二行走轮的中心距l以及第一行走轮与行走机构的重心沿第一方向的距离l1,基于第二计算式得到第一行走轮的转矩补偿系数σ1,基于第三计算式得到第二行走轮的转矩补偿系数σ2,其中所述第二计算式为:
20、
21、所述第三计算式为:
22、
23、可选地,所述行走机构的控制方法还包括基于当前加速度得到第一驱动器转矩补偿值tc1以及第二驱动器的转矩补偿值tc2的步骤,其包括以下子步骤:
24、获取当前加速度a,其中沿第一方向的加速度为正值;
25、获取行走机构的重心与第一行走轮的沿第二方向的距离hs;
26、根据所述hs、第一行走轮与第二行走轮的中心距l以及所述当前加速度a,得到加速力fa;
27、根据所述加速力fa以及第一行走轮的直径d1和第二行走轮的直径d2,得到第一驱动器的转矩补偿值tc1以及第二驱动器的转矩补偿值tc2。
28、可选地,根据所述hs、第一行走轮与第二行走轮的中心距l以及所述当前加速度,基于第四计算式得到加速力fa,其中所述第四计算式为:
29、
30、以及,根据所述加速力fa以及第一行走轮的直径d1,基于第五计算式得到第一驱动器的转矩补偿值tc1;基于所述加速力fa以及第二行走轮的直径d2,基于第六计算式得到第二驱动器的转矩补偿值tc2,其中,所述第五计算式为:
31、
32、所述第六计算式为:
33、
34、可选地,所述行走机构为重型推垛机。
35、第二方面,本技术提供了一种行走机构的控制系统,所述行走机构包括沿第一方向间隔设置的第一行走轮和第二行走轮,所述第一行走轮由第一驱动组件驱动,所述第二行走轮由第二驱动组件驱动,所述第一驱动组件包括第一驱动器和第一电机,所述第二驱动组件包括第二驱动器和第二电机,第一驱动器被配置为位置控制模式,第二驱动器被配置为速度控制模式,所述控制系统包括:
36、第一获取模块,其用于获取第一驱动器的速度给定值n1set、第一行走轮的当前直径d1以及第二行走轮的当前直径d2;
37、第一计算模块,其用于根据第一驱动器的速度给定值n1set、第一行走轮的当前直径d1以及第二行走轮的当前直径d2,得到第二驱动器的初始速度给定值n2set_s;
38、第二获取模块,其用于获取第一驱动器的转矩m1以及第二驱动器的转矩m2;
39、第二计算模块,其用于基于所述第一驱动器的转矩m1以及第二驱动器的转矩m2的差值,得到第二驱动器的速度补偿值n2com;
40、第三计算模块,其用于将所述第二驱动器的初始速度给定值n2set_s与第二驱动器的速度补偿值n2com相加,将和作为第二驱动器的速度给定值n2set,以使第一行走轮和第二行走轮的实际转矩相同。
41、第三方面,本技术提供了一种电子设备,包括:处理器、通信接口、存储器和总线,所述处理器、所述通信接口和所述存储器通过所述总线完成相互间的通信;
42、所述存储器用于存储至少一可执行指令,所述可执行指令使所述处理器执行如上所述方法对应的操作。
43、本技术的行走机构的控制方案,将第一驱动器的速度给定值n1set与第一行走轮的当前直径d1以及第二行走轮的当前直径d2相结合,作为第二驱动器的初始速度给定值n2set_s,n2set_s再叠加基于第一驱动器和第二驱动器的转矩差的速度补偿,实现两个行走轮的线速度和转矩的实时同步。
- 还没有人留言评论。精彩留言会获得点赞!