一种基于超声波的复杂环境寻路小车
本技术涉及自动驾驶机器人,尤其涉及一种基于超声波的复杂环境寻路小车。
背景技术:
1、智能寻小车,也称电脑鼠,是使用嵌入式微控制器、传感器和机电运动部件构成的一种微型机器人,它可以在不同环境中自动记忆和选择路径,采用相应的算法,快速地达到所设定的目的地。
2、目前自动驾驶汽车技术和循迹避障智能小车技术发展迅速,前者应用于户外公路环境,其可以利用自身较大的车辆体积,在车身上加装各种雷达、传感器,实现自动寻路。而后者主要应用于室内固定路线,如agv小车等,其基于较小的体积,能够按照规划好的固定线路或依照预先设置的标记在室内移动,不过无法在室内或一些狭小的复杂环境下自动寻找路线到达目的地。
3、但是,在某些场合下,人们需要体积小,并且具备自动寻路功能的小车,以实现复杂环境下的自动寻路,例如地震搜救等场景,而上述两种现有的车辆均不能满足要求。
技术实现思路
1、有鉴于此,有必要提供一种基于超声波的复杂环境寻路小车,用以解决智能小车如何在狭小的复杂环境下自动寻路的问题。
2、为达到上述技术目的,本实用新型采取了以下技术方案:
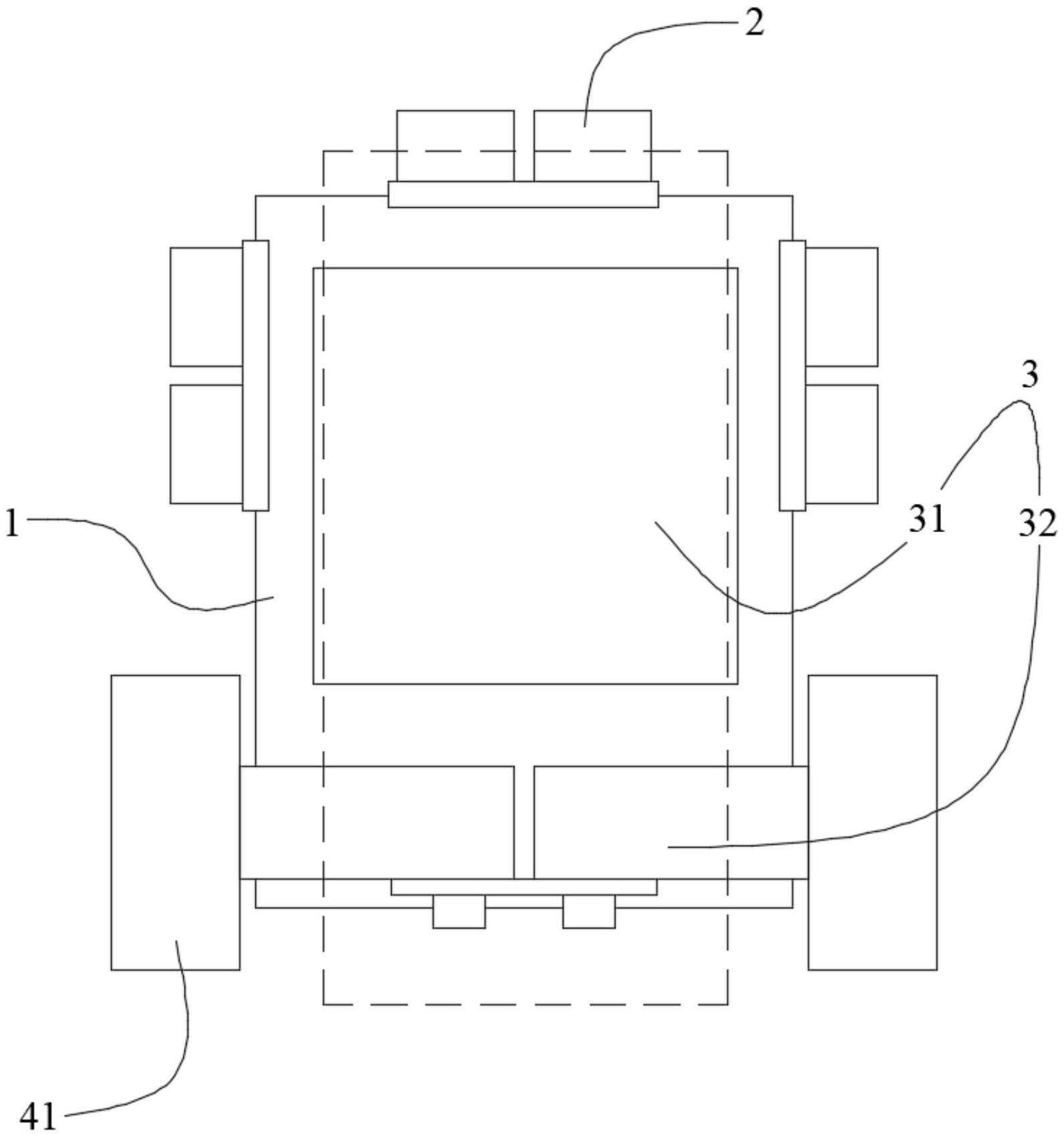
3、本实用新型提供了一种基于超声波的复杂环境寻路小车,包括:
4、pcb控制板,包括板体和pcb电路;
5、多个超声波传感器,均连接于所述板体且同时和所述pcb电路电连接,多个所述超声波传感器的探测方向各不相同,且均背离所述板体;
6、驱动组件,连接于所述板体且同时和所述pcb电路电连接;
7、移动组件,连接于所述驱动组件。
8、进一步的,所述驱动组件包括电源和电机,所述电源和所述电机均和所述pcb电路电连接,所述电机包括旋转端和固定端,所述电机的固定端和所述电源均连接于所述板体,所述电机的旋转端传动连接所述移动组件。
9、进一步的,所述移动组件包括两个驱动轮和万向轮,所述电机的数量为两个,两个所述电机分别连接两个所述驱动轮,所述万向轮可转动地连接于所述板体。
10、进一步的,所述电源和所述电机均连接于所述板体的一侧,所述万向轮连接于所述板体的另一侧,两个所述驱动轮的转动轴线重合且平行于所述板体,两个所述驱动轮分别位于所述板体宽度方向的两侧,所述驱动轮和所述万向轮分别位于所述板体长度方向的两端。
11、进一步的,所述pcb电路包括控制芯片和双h桥式驱动芯片,所述控制芯片电连接所述电源和所述超声波传感器,所述双h桥式驱动芯片包括两组h桥电路,两组h桥电路均电连接所述电源和所述控制芯片,并且分别电连接两个所述电机。
12、进一步的,所述h桥电路包括两个单边电路,每个所述单边电路均包括供电输入端、信号输入端和电位输出端,两个所述单边电路中的所述供电输入端均电连接所述电源,两个所述单边电路中的所述信号输入端均电连接所述控制芯片,所述单边电路中的所述电位输出端分别电连接所述电机的正极供电和负极供电。
13、进一步的,所述单边电路包括第一电阻、第一npn型三极管、pnp型三极管、第二电阻、第二npn型三极管和第三npn型三极管;所述第一电阻的一端为所述信号输入端,所述第一电阻的另一端电连接所述第一npn型三极管的b极;所述第一npn型三极管的e极接地,所述第一npn型三极管的c极电连接所述pnp型三极管的b极、所述第二npn型三极管的b极和所述第二电阻的一端;所述pnp型三极管的c极接地,所述pnp型三极管的e极为所述电位输出端,并且电连接所述第三npn型三极管的e极,所述第二电阻的另一端为所述供电输入端,所述第二电阻的另一端电连接所述第二npn型三极管的c极和所述第三npn型三极管的c极,所述第二npn型三极管的e极电连接所述第三npn型三极管的b极。
14、进一步的,所述控制芯片的型号为at89c52,所述控制芯片的1~4号引脚分别电连接四个所述信号输入端,所述控制芯片的31号引脚电连接所述电源,所述控制芯片的34~39号引脚分别电连接多个所述超声波传感器。
15、进一步的,所述超声波传感器的数量为三个,所述超声波传感器的型号为hc-sr04超声波传感模块,三个所述超声波传感器的1号引脚均电连接所述电源,三个所述超声波传感器的2号引脚分别电连接所述控制芯片的35号、37号及39号引脚,三个所述超声波传感器的3号引脚分别电连接所述控制芯片的34号、36号及38号引脚,三个所述超声波传感器的4号引脚均接地。
16、进一步的,三个所述超声波传感器分别连接于所述板体的三个侧边。
17、本实用新型提供一种基于超声波的复杂环境寻路小车,其包括pcb控制板、多个超声波传感器、驱动组件和移动组件,使用时其通过超声波传感器探测复杂环境,并基于探测结果通过pcb控制板控制驱动组件,进而通过移动组件在复杂环境移动。相比于现有技术,本实用新型利用了超声波传感器的外界干扰小,尤其是无光干扰小,以及环境要求低、有效检测距离远等优点,实现了小车的自动寻路,同时仅使用了超声波传感器,并将超声波传感器、驱动组件和移动组件直接连接于pcb控制板上,最大程度地减少了小车的体积,使其具备自动寻路功能的同时,还能够在室内、废墟等狭小的地方穿梭,完美解决了智能小车如何在狭小的复杂环境下自动寻路的问题,具备很好的实用性。
技术特征:
1.一种基于超声波的复杂环境寻路小车,其特征在于,包括:
2.根据权利要求1所述的基于超声波的复杂环境寻路小车,其特征在于,所述电源和所述电机均连接于所述板体的一侧,所述万向轮连接于所述板体的另一侧,两个所述驱动轮的转动轴线重合且平行于所述板体,两个所述驱动轮分别位于所述板体宽度方向的两侧,所述驱动轮和所述万向轮分别位于所述板体长度方向的两端。
3.根据权利要求1所述的基于超声波的复杂环境寻路小车,其特征在于,所述h桥电路包括两个单边电路,每个所述单边电路均包括供电输入端、信号输入端和电位输出端,两个所述单边电路中的所述供电输入端均电连接所述电源,两个所述单边电路中的所述信号输入端均电连接所述控制芯片,所述单边电路中的所述电位输出端分别电连接所述电机的正极供电和负极供电。
4.根据权利要求3所述的基于超声波的复杂环境寻路小车,其特征在于,所述单边电路包括第一电阻、第一npn型三极管、pnp型三极管、第二电阻、第二npn型三极管和第三npn型三极管;所述第一电阻的一端为所述信号输入端,所述第一电阻的另一端电连接所述第一npn型三极管的b极;所述第一npn型三极管的e极接地,所述第一npn型三极管的c极电连接所述pnp型三极管的b极、所述第二npn型三极管的b极和所述第二电阻的一端;所述pnp型三极管的c极接地,所述pnp型三极管的e极为所述电位输出端,并且电连接所述第三npn型三极管的e极,所述第二电阻的另一端为所述供电输入端,所述第二电阻的另一端电连接所述第二npn型三极管的c极和所述第三npn型三极管的c极,所述第二npn型三极管的e极电连接所述第三npn型三极管的b极。
5.根据权利要求3所述的基于超声波的复杂环境寻路小车,其特征在于,所述控制芯片的型号为at89c52,所述控制芯片的1~4号引脚分别电连接四个所述信号输入端,所述控制芯片的31号引脚电连接所述电源,所述控制芯片的34~39号引脚分别电连接多个所述超声波传感器。
6.根据权利要求5所述的基于超声波的复杂环境寻路小车,其特征在于,所述超声波传感器的数量为三个,所述超声波传感器的型号为hc-sr04超声波传感模块,三个所述超声波传感器的1号引脚均电连接所述电源,三个所述超声波传感器的2号引脚分别电连接所述控制芯片的35号、37号及39号引脚,三个所述超声波传感器的3号引脚分别电连接所述控制芯片的34号、36号及38号引脚,三个所述超声波传感器的4号引脚均接地。
7.根据权利要求6所述的基于超声波的复杂环境寻路小车,其特征在于,三个所述超声波传感器分别连接于所述板体的三个侧边。
技术总结
本技术涉及一种基于超声波的复杂环境寻路小车,其包括PCB控制板、多个超声波传感器、驱动组件和移动组件,使用时其通过超声波传感器探测环境,并基于探测结果通过PCB控制板控制驱动组件,进而通过移动组件在复杂环境移动。相比于现有技术,本技术利用了超声波传感器的外界干扰小,尤其是无光干扰小,以及环境要求低、有效检测距离远等优点,实现了小车的自动寻路,同时仅使用了超声波传感器,并将超声波传感器、驱动组件和移动组件直接连接于PCB控制板上,最大程度地减少了小车的体积,使其具备自动寻路功能的同时,还能够在复杂环境狭小的地方穿梭,完美解决了智能小车如何在复杂环境自动寻路的问题,具备很好的实用性。
技术研发人员:杨明悦,陶俊,吴瑰,胡科甲,彭俊
受保护的技术使用者:江汉大学
技术研发日:20230110
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!