一种架车机自动对位系统的制作方法
本技术实施例涉及车辆工程,尤其涉及一种架车机自动对位系统。
背景技术:
1、动车组运营里程到达规定的检修里程后,需要对其转向架进行拆解维修。此时需要将动车组整列举升到合适的作业高度,便于维修人员拆解转向架进行维修。维修后需要重新将转向架安装到动车组,而动车组移动架车机是动车架落车作业过程中重大关键技术装备。一般情况下,每节动车可以配置4台移动架车机,对于8编组动车,在动车组两侧各配置16台移动架车机,一共设32台移动架车机。
2、现有的移动架车机可以沿轨道纵向走行,控制垂直于轨道中心线的方向的托头横向伸缩,以及控制垂直于地面的高度方向的托架进行升降运动,实现三个方向的电动对位。而动车组在轨道方向的停车误差、动车轮的磨损造成的轮径尺寸的变化,会引起移动架车机在纵向方向和高度方向的数据变化,因此需要对架车机托头和动车架车点进行对位调整。目前的架车机依靠人工点动方式实现架车机托头和动车架车点的准确对位。该对位过程费时费力,并且对位精度较差,影响了动车组的检修效率,延长了整个动车组的检修时间。
技术实现思路
1、本实用新型提供一种架车机自动对位系统,能够自动准确的完成架车机和动车架车点的准确对位工作,提高动车组的检修效率,缩短整个动车组的检修时间。
2、本实用新型实施例提供了一种架车机自动对位系统,所述系统包括:
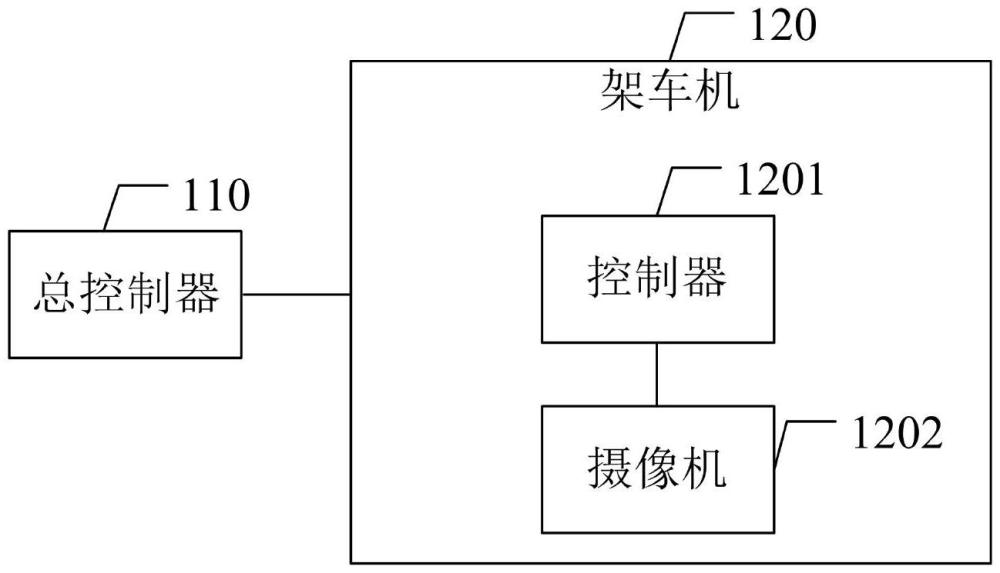
3、总控制器和至少一个架车机;所述架车机至少包括一个控制器和一个摄像机;其中,
4、所述控制器,用于当所述架车机的托架到达所述托架的默认高度位置时,向所述摄像机发送架车点查找指令;
5、所述摄像机,用于响应于所述架车点查找指令,拍摄一张包括架车点的图像,并将所述包括架车点的图像发送至所述总控制器;
6、所述总控制器,用于从所述包括架车点的图像中提取出所述架车点,并基于所述架车点和所述包括架车点的图像的中心点确定所述架车机的目标走行数据;将所述目标走行数据发送至所述控制器,使得所述控制器控制所述架车机进行对位。
7、在上述实施例中,所述总控制器,还用于接收用户发送的车辆型号,从预先确定的位置信息库中提取出所述车辆型号对应的所述托架的默认高度位置,将所述托架的默认高度位置发送至所述控制器,使得所述控制器执行向所述摄像机发送架车点查找指令的步骤。
8、所述架车机还包括高度电机,所述控制器,具体用于通过所述高度电机控制所述托架从其初始位置移动至所述默认高度位置。
9、在上述实施例中,所述系统还包括高度编码器,所述控制器,具体用于通过所述高度编码器获取所述架车机的托架的当前高度位置,当所述架车机的托架的当前高度位置为所述默认高度位置时,向所述摄像机发送所述查找指令。
10、在上述实施例中,所述摄像机设置于所述托架上,所述摄像机,具体用于响应于所述架车点查找指令,按照预设周期拍摄一张候选图像,若在当前周期拍摄到的候选图像中不存在所述架车点,则将下一个周期作为当前周期,重复执行上述操作,直到所述当前周期拍摄到的架车点图像中存在架车点时,将所述当前周期拍摄的候选图像确定为所述包括架车点的图像。
11、在上述实施例中,所述摄像机,还用于在确定所述包括架车点的图像后向所述控制器发送停止移动指令,使得所述控制器控制所述架车机停止移动。
12、在上述实施例中,所述架车机还包括:纵向电机,所述控制器,还用于通过所述纵向电机控制所述架车机按照预设方向和预设速度移动,直到接收到所述停止移动指令,通过所述纵向电机控制所述架车机停止移动。
13、所述目标走行数据至少包括所述架车机的纵向走行位移,所述纵向走行位移包括:纵向走行距离和纵向走行方向;所述总控制器,具体用于以所述包括架车点的图像的中心点为原点建立直角坐标系,若所述架车点在所述坐标系的第1象限或者第4象限,则确定所述纵向走行方向为正方向;若所述架车点在所述坐标系的第2象限或者第3象限,则确定所述纵向走行方向为负方向。
14、所述目标走行数据还包括所述架车机的托架的高度走行位移,所述总控制器,具体用于若所述架车点在所述坐标系的第1象限或者第2象限,则确定所高度走行位移的方向为正方向;若所述架车点在所述坐标系的第3象限或者第4象限,则确定所述高度走行位移的方向为正方向。
15、所述架车机还包括:横向电机,所述架车机包括托头,所述总控制器,具体用于从预先确定的位置信息库中提取出所述车辆型号对应的所述托头的横向默认位置,将所述托头的横向默认位置发送至所述控制器,以使得所述控制器通过所述横向电机控制所述托头从其初始位置移动至所述横向默认位置。
16、本实用新型提供的架车机自动对位系统,包括:总控制器和至少一个架车机;架车机至少包括一个控制器和一个摄像机;其中,控制器,用于当架车机的托架到达托架的默认高度位置时,向摄像机发送架车点查找指令;摄像机,用于响应于架车点查找指令,拍摄一张包括架车点的图像,并将图像发送至总控制器;总控制器,用于从图像中提取出架车点,并基于架车点和图像的中心点确定架车机的目标走行数据;将目标走行数据发送至控制器,使得控制器控制架车机进行对位。因此,和现有技术相比,本实用新型实施例提供的架车机自动对位系统,能够根据摄像机拍摄到的架车点的图像自动规划出架车机的走行数据,快速、准确的控制架车机进行对位,节约人力物力资源的同时,提高了架车机对位的精度以及动车组的检修效率,缩短了整个动车组的检修时间。
技术特征:
1.一种架车机自动对位系统,其特征在于,所述系统包括:总控制器和至少一个架车机;所述架车机至少包括一个控制器和一个摄像机;其中,
2.根据权利要求1所述的系统,其特征在于,所述总控制器,还用于接收用户发送的车辆型号,从预先确定的位置信息库中提取出所述车辆型号对应的所述托架的默认高度位置,将所述托架的默认高度位置发送至所述控制器,使得所述控制器执行向所述摄像机发送架车点查找指令的步骤。
3.根据权利要求2所述的系统,其特征在于,所述系统还包括高度编码器,所述控制器,具体用于当所述架车机的托架的当前高度位置为所述默认高度位置时,向所述摄像机发送所述查找指令。
4.根据权利要求1所述的系统,其特征在于,所述摄像机,还用于在确定所述包括架车点的图像后向所述控制器发送停止移动指令,使得所述控制器控制所述架车机停止移动。
5.根据权利要求4所述的系统,其特征在于,所述架车机还包括:纵向电机,所述控制器,还用于通过所述纵向电机控制所述架车机按照预设方向和预设速度移动,直到接收到所述停止移动指令,通过所述纵向电机控制所述架车机停止移动。
6.根据权利要求5所述的系统,其特征在于,所述目标走行数据至少包括所述架车机的纵向走行位移,所述纵向走行位移包括:纵向走行距离和纵向走行方向;所述总控制器,具体用于以所述包括架车点的图像的中心点为原点建立直角坐标系。
7.根据权利要求6所述的系统,其特征在于,所述目标走行数据还包括所述架车机的托架的高度走行位移。
8.根据权利要求2所述的系统,其特征在于,所述架车机还包括:横向电机,所述架车机包括托头,所述总控制器,具体用于从预先确定的位置信息库中提取出所述车辆型号对应的所述托头的横向默认位置,将所述托头的横向默认位置发送至所述控制器,以使得所述控制器通过所述横向电机控制所述托头从其初始位置移动至所述横向默认位置。
技术总结
本技术公开了一种架车机自动对位系统。所述系统包括:总控制器和至少一个架车机;架车机至少包括一个控制器和一个摄像机;其中,控制器,用于当架车机的托架到达托架的默认高度位置时,向摄像机发送架车点查找指令;摄像机,用于响应于架车点查找指令,拍摄一张包括架车点的图像,并将图像发送至总控制器;总控制器,用于从图像中提取出架车点,并基于架车点和图像的中心点确定架车机的目标走行数据;将目标走行数据发送至控制器,使得控制器控制架车机进行对位。本技术提供的架车机自动对位系统,在节约人力物力资源的同时,提高了架车机对位的精度以及动车组的检修效率,缩短了整个动车组的检修时间。
技术研发人员:黎莎,喻贵忠
受保护的技术使用者:北京铁道工程机电技术研究所股份有限公司
技术研发日:20230303
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!