一种AMR智能导航物料搬运平台小车的制作方法
本技术涉及智能搬运,具体涉及一种amr智能导航物料搬运平台小车。
背景技术:
1、amr是autonomous mobile robot的缩写,具体来说是一种自主移动机器人,在amr中集和了环境感知,动态决策规划,行为控制与执行等多功能模块,通过系统综合控制,实现在高端智能车间中的智能搬运。
2、目前传统型物流搬运车安全隐患大,定位精度低,无法精确感搬运车体边缘的位置,在搬运车的边沿容易与外部物体产生剐蹭,影响搬运车的正常运动,因此需要在搬运车的路径上预留交大的通过空间;同时传统车轮的运行需要通过车轮的旋转运动来实现转向运动需求,这样对于一些更为精确的运动到达位置要求需要多次反复运动,传统搬运车的整体环境适应力较差,工作效率较低,并且对于复杂路径及路径上障碍物无法及时避让、需要人工进行操作修改的问题。
技术实现思路
1、针对以上问题,本实用新型提供一种使用方便可以自主对通过路径进行探测,可以智能导航实现自主规避,运动更加灵活的amr智能导航物料搬运平台小车。
2、本实用新型解决其技术问题所采用的技术方案是:该amr智能导航物料搬运平台小车包括包裹在外部方形的安装壳体,所述安装壳体的上部水平设计有方形的货盘托,所述货盘托的上部用来装配承载代搬运物品的货盘,所述安装壳体的对角位置设计有扫描障碍物的水平雷达,所述安装壳体侧边的中间位置安装有垂直雷达,所述安装壳体内部靠下位置设计有四个可以分别控制的麦克拉姆轮,所述安装壳体下部四周安装有向外凸出的防撞感应条,所述水平雷达、垂直雷达、麦克拉姆轮、防撞感应条分别接入平台小车的智能控制系统。
3、作为优选,在所述安装壳体靠近四角的位置安装有防坠落传感器。
4、作为优选,在所述安装壳体的一个边角位置货盘托边角下方设计有急停开关,所述急停开关上下按压设计。
5、作为优选,所述安装壳体的前部设计有倾斜朝上的操作屏,所述操作屏凹陷在所述安装壳体前部。
6、作为优选,所述安装壳体前方设计有超声波传感器。
7、本实用新型的有益效果在于:本amr智能导航物料搬运平台小车主要使用在场景路径复杂,需要精确定位车间中,如晶圆、芯片生产或者其它高要求的智能车间中,该平台小车以智能导航系统为基础,通过麦克拉姆轮实现多方位自由转向,运行位置精确,对于精确的位置地点可以一次到达,无需反复运动,安装壳体外部包裹的方形安装壳体设计,使得平台小车运动时不易与外部物体剐蹭;对角设计的水平雷达可以对方形安装壳体的前后左右四面进行精确边角位置雷达扫描,有助于平台小车在左右狭窄位置通过,小车侧边的垂直雷达可以在垂直面扫描障碍物,使得小车在上下方向也可以方便的避开障碍物。防撞感应条的下部设计,不仅可以在小车碰到障碍物时快速感应到,不易翻车,同时防撞感应条的凸出设计,可以有效保护小车主体不被碰到,保护了小车的安全。
8、另外平台小车的智能控制系统与各功能部件的连接使得导航系统可以更加具体的进行个体行进规划,同时当各个小车的系统相互联网时,可以进一步将区域内所有可操作对象汇集至区域管理系统中,使得限定区域中机器小车个体之间协同管理,可分别派遣,与电子货架、生产机台之间的路径进行记忆演算,防止同区域内不同目标之对象产生碰撞,从而提高工作效率,极大降低危险性。
技术特征:
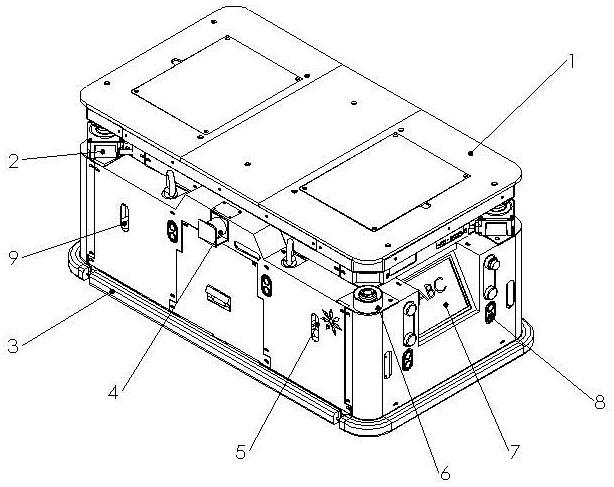
1.一种amr智能导航物料搬运平台小车,它包括包裹在外部方形的安装壳体,所述安装壳体的上部水平设计有方形的货盘托(1),所述货盘托(1)的上部用来装配承载代搬运物品的货盘,其特征在于:所述安装壳体的对角位置设计有扫描障碍物的水平雷达(2),所述安装壳体侧边的中间位置安装有垂直雷达(4),所述安装壳体内部靠下位置设计有四个可以分别控制的麦克拉姆轮(9),所述安装壳体下部四周安装有向外凸出的防撞感应条(3),所述水平雷达(2)、垂直雷达(4)、麦克拉姆轮(9)、防撞感应条(3)分别接入平台小车的智能控制系统。
2.根据权利要求1所述的一种amr智能导航物料搬运平台小车,其特征在于:在所述安装壳体靠近四角的位置安装有防坠落传感器(5)。
3.根据权利要求1所述的一种amr智能导航物料搬运平台小车,其特征在于:在所述安装壳体的一个边角位置货盘托边角下方设计有急停开关(6),所述急停开关上下按压设计。
4.根据权利要求1所述的一种amr智能导航物料搬运平台小车,其特征在于:所述安装壳体的前部设计有倾斜朝上的操作屏(7),所述操作屏(7)凹陷在所述安装壳体前部。
5.根据权利要求1所述的一种amr智能导航物料搬运平台小车,其特征在于:所述安装壳体前方设计有超声波传感器(8)。
技术总结
本技术提供一种AMR智能导航物料搬运平台小车包括包裹在外部方形的安装壳体,所述安装壳体的上部水平设计有方形的货盘托,所述安装壳体的对角位置设计有扫描障碍物的水平雷达,所述安装壳体侧边的中间位置安装有垂直雷达,所述安装壳体内部靠下位置设计有四个可以分别控制的麦克拉姆轮,所述安装壳体下部四周安装有向外凸出的防撞感应条,所述水平雷达、垂直雷达、麦克拉姆轮、防撞感应条分别接入平台小车的智能控制系统。该平台小车使用方便可以自主对通过路径进行探测,可以智能导航实现自主规避,可以快速通过狭小空间准确到达精确的设定位置。
技术研发人员:洪成都
受保护的技术使用者:捷螺智能设备(苏州)有限公司
技术研发日:20230423
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!