一种自适应PID控制器的参数优化方法
本发明属于pid控制,具体涉及一种自适应pid控制器的参数优化方法。
背景技术:
1、pid控制技术,即比例-积分-微分控制技术,是在工业过程中控制一个或多个变量的一种基本方法。其核心思想是通过比例、积分和微分三个环节来调整控制信号,以达到对被控对象的有效控制。pid控制器的输出是根据输入误差的比例、积分和微分计算得出的,因此能够快速响应系统的变化,并消除误差。pid控制器的设计原理相对简单,易于理解和实现。pid控制器对系统的参数变化不太敏感,因此具有较强的鲁棒性。
2、通过调整pid控制器的参数,可以灵活地调整控制系统的性能,满足不同的控制需求。但pid控制器的参数调整相对复杂,需要一定的经验和技巧,对于某些特定的控制系统,如果参数选择不当,可能会导致pid控制器不稳定,从而影响控制效果。
3、近年来,最优控制问题在解决实际问题中越来越重要。在这方面,元启发式算法在有效地解决这些问题时是有效的。暴龙优化算法(troa)的灵感来自于霸王龙的狩猎行为,该算法在12个基准问题和4个实际最优控制问题上进行了测试,将微分进化(de)算法、粒子群优化(pso)、灰狼优化器(gwo)、白鲨优化器(wso)、水母搜索(js)、乌鸦搜索算法(csa)、金鹰优化(geo)等7种著名的优化技术进行了比较,与这些方法相比,该方法的计算效果更好。但是,标准暴龙优化算法仍然可以在寻优精度和阻止算法陷入局部最优问题上优化。
技术实现思路
1、本发明的目的在于:提出一种自适应pid控制器的参数优化方法,改进暴龙算法,通过改进暴龙狩猎的成功率 ,解决暴龙算法易陷入局部最优解,导致寻优精度低的问题,从而解决目前传统pid控制器在复杂环境和非线性被控对象中应用时存在的控制灵敏度和控制精度低的问题。
2、为了实现上述目的,本发明采用了如下技术方案,一种自适应pid控制器的参数优化方法,具体步骤如下。
3、步骤一:构建自适应pid控制系统模型。
4、步骤二:改进暴龙算法,具体实现为:改进暴龙狩猎的成功率 ,从而改进算法开发阶段的更新策略。
5、步骤三:利用改进暴龙算法对pid控制器参数整定优化,迭代得到优化后的pid控制器的kp、ki、kd参数。
6、步骤四:采用matlab和simulink对自适应pid控制系统进行仿真。
7、进一步地,所述步骤一中,自适应pid控制系统模型包括目标值输入模块,实时值读取模块,偏差计算模块,pid控制器模块,改进暴龙算法模型,非线性被控对象模块。
8、进一步地,偏差计算模块计算控制非线性被控对象的目标值与实时值的差值,将差值输入到改进暴龙算法模型中适应度函数,用于协调改进暴龙算法对kp、ki、kd的寻优,将寻优得到的最优参数输入到自适应pid控制器,经自适应pid控制器输出最优被控对象控制数值。
9、进一步地,所述步骤一中,自适应pid控制系统模型中被控对象的传递函数为:
10、;
11、式中,为拉普拉斯变量。
12、进一步地,所述步骤二中,改进暴龙狩猎的成功率 ,改进后数学模型公式为:
13、;
14、式中,为待更新的改进后的暴龙狩猎成功率,为当前迭代次的改进后的暴龙狩猎成功率, 为所有个体的适应度值的和,为当前最优适应度值,为取值[0,1]内的随机数,为暴龙种群数量,为扰动因子,数学模型公式为:
15、;
16、式中,为标准正态分布的随机数,为当前迭代次数,为总的迭代次数。
17、进一步地,暴龙狩猎成功率,是暴龙算法特有的因子参数,影响暴龙算法的寻优精度,改进暴龙狩猎成功率时,使其随暴龙算法每次迭代的适应度值和当前最优适应度值变化而变化,同时加入扰动因子,在迭代前期,扰动因子保持较大值,可以扩大暴龙狩猎范围,保证种群多样性,迭代后期,扰动因子保持较小值,提高暴龙狩猎精度,降低算法陷入局部最优的概率。
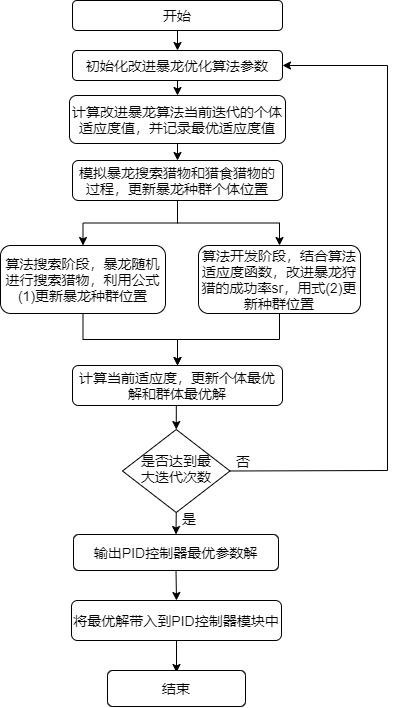
18、进一步地,所述步骤三中,利用改进暴龙算法对pid控制器参数整定优化,迭代得到优化后的pid控制器的kp、ki、kd参数,具体步骤为:
19、s1.将自适应pid控制器的参数kp、ki、kd的解组合编码为暴龙算法的暴龙位置;
20、s2.初始化改进暴龙算法参数:包括暴龙算法种群初始位置、算法搜索空间上下界、种群规模、空间维度和最大迭代次数;所述种群初始位置为自适应pid控制参数的初始解,所述算法搜索空间上下界为kp、ki、kd的解的上下限;
21、s3.计算改进暴龙算法当前迭代的个体适应度值,并记录最优适应度值,适应度函数公式为:
22、;
23、式中,为迭代时刻时被控对象的目标值与当前值的误差;
24、s4.模拟暴龙搜索猎物和猎食猎物的过程,更新暴龙种群个体位置;
25、s5.计算当前适应度,并与历史最优适应度比较,更新个体最优解,同时,根据所有个体的适应度,更新群体最优解;
26、s6.判断当前迭代次数是否满足,若满足,则输出最优解,否则返回执行s2;
27、s7.将最优解分解得到kp,ki,kd三个参数,带入到pid控制器中,完成自适应pid控制器参数的优化。
28、进一步地,所述s4中,模拟暴龙搜索猎物和猎食猎物的过程,更新暴龙种群个体位置,具体步骤为:
29、s41.算法搜索阶段,暴龙随机进行搜索猎物,利用公式(1)更新暴龙种群位置;
30、(1);
31、式中,为暴龙到达猎物的估计距离,为随机距离值,为暴龙待更新的位置,为当前迭代猎物的位置,为随机猎物的位置;
32、s42.算法开发阶段,结合算法适应度函数,改进暴龙狩猎的成功率,位置更新公式如式(2)所示:
33、(2);
34、式中,为待更新的改进后的暴龙狩猎成功率,介于[0.1,1];为暴龙运动速度,影响算法寻优速度;为猎物运动速度,影响算法寻优速度;为当前暴龙个体与猎物的距离;为暴龙与目标猎物的最小距离。
35、进一步地,所述步骤s1中,采用实数编码编码的方式将自适应pid控制器的参数kp、ki、kd的解组合编码为暴龙算法的暴龙位置。
36、进一步地,所述步骤s2中,初始化改进暴龙算法,随机生成暴龙种群位置,公式为:
37、;
38、式中,{x}_{i}=\left [ {} \right ]\left [ {{x}_{1},{x}_{2},\cdot \cdot \cdot \cdot \cdot {x}_{n}} \right ]为暴龙各个个体的位置,n为暴龙的总数,dim为空间维度,取值为3,ub为暴龙算法搜索上界,lb为暴龙算法搜索下界。
39、综上所述,由于采用了上述技术方案,本发明的有益效果是:
40、1、本发明提出的一种自适应pid控制器的参数优化方法,本发明初次将暴龙优化算法(troa)应用于pid控制参数寻优,利用改进暴龙算法在线调整pid控制器的三个参数,避免人工调参的复杂性。改进后的暴龙算法能够在搜索空间中完成较好寻优,在算法前期避免了陷入局部最优解的风险,在算法后期收敛速度明显加快,并具备一定的强适应性和鲁棒性。
41、2、改进暴龙狩猎成功率时,使其随暴龙算法每次迭代的适应度值和当前最优适应度值变化而变化,同时加入扰动因子,在迭代前期,扰动因子保持较大值,可以扩大暴龙狩猎范围,保证种群多样性,迭代后期,扰动因子保持较小值,提高暴龙狩猎精度,降低算法陷入局部最优的概率。
- 还没有人留言评论。精彩留言会获得点赞!