基于边缘计算的动态鲁棒多目标优化系统
本发明属于自动化,尤其涉及一种基于边缘计算的动态鲁棒多目标优化系统。
背景技术:
1、无人机技术发展日新月异,如今,各个领域都能够用到无人机进行一些任务。无人机路径规划问题是无人机调度系统框架的重要组成部分,现有的无人机路径规划时,通常会考虑到一些静态的障碍物,在规划路径时将这些静态的障碍物避开。而当无人机飞行时,如何避开动态的障碍物,仍是一个待解决的问题。
2、相关的现有技术:基于传统云计算的无人机飞行路径规划系统。
3、这种系统通常依赖于中央云计算平台来处理大量的数据和进行复杂的计算任务,如路径规划、障碍物识别等。无人机在执行任务过程中,会实时收集数据并发送到云平台,由云平台完成数据处理和分析,然后再将指令发送回无人机。
4、现有技术存在的技术问题:
5、1)延迟问题:
6、在基于云计算的系统中,数据需要在无人机和云平台之间传输,这导致显著的通信延迟。在需要快速响应的应用场景中(如紧急避障),这种延迟影响无人机的实时性能。
7、2)带宽限制:
8、无人机生成的数据量通常很大,尤其是在使用高分辨率传感器时。在带宽受限的环境下,将大量数据传输到云平台非常耗时,影响系统的效率。
9、3)依赖网络连接:
10、该系统高度依赖稳定的网络连接。在网络覆盖不佳的区域,无人机无法有效地与云平台通信,从而影响任务执行。
11、4)能耗和成本:
12、长时间的数据传输不仅增加了无人机的能耗,还增加云服务的使用成本。
13、5)数据安全和隐私:
14、将敏感数据传输至云平台带来数据安全和隐私方面的风险。
15、综上所述,尽管基于云计算的无人机飞行路径规划系统在处理大规模数据和复杂计算方面有其优势,但在通信延迟、带宽限制、对网络的依赖、能耗和成本以及数据安全方面存在一定的技术挑战。这些问题限制了该系统在某些应用场景中的实用性和效率。
技术实现思路
1、针对现有技术存在的问题,本发明提供了一种基于边缘计算的动态鲁棒多目标优化系统。
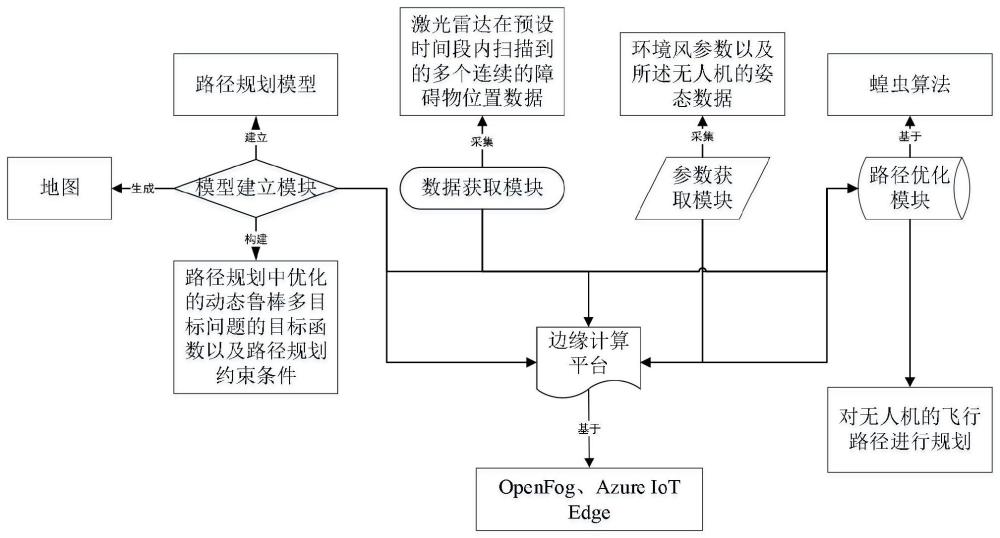
2、本发明是这样实现的,一种基于边缘计算的动态鲁棒多目标优化系统,用于无人机的飞行路径规划,该系统包括:
3、模型建立模块,用于构建路径规划中优化的动态鲁棒多目标问题的目标函数和路径规划约束条件,并生成地图;
4、数据获取模块,用于采集激光雷达在预设时间段内扫描到的多个连续的障碍物位置数据;
5、参数获取模块,用于采集环境风参数以及无人机的姿态数据;
6、路径优化模块,通过蝗虫算法对无人机的飞行路径进行规划,基于模型建立模块生成的地图、障碍物位置数据、环境风参数以及姿态数据;
7、边缘计算平台,与上述各模块连接,基于openfog、azure iot edge等技术,以管理和运行各种应用程序和服务;
8、其中,所述路径优化模块进一步包括深度学习算法和强化学习机制,用于实时适应环境变化并动态调整飞行路径。
9、其中所述数据获取模块进一步包括数据融合技术,用于整合来自激光雷达、风速计和姿态传感器的数据,并利用贝叶斯网络或卡尔曼滤波器等方法提高数据的准确性和可靠性;
10、所述边缘计算平台进一步包括机器学习算法,用于优化资源的分配和管理,以及一个实时学习系统,该系统根据实时数据和环境反馈动态调整飞行模型,以适应环境的变化;
11、其中,所述深度学习算法用于分析由激光雷达扫描获得的障碍物数据,而所述强化学习机制用于优化多目标问题,并通过时间序列分析或预测模型估计未来的环境条件。
12、本发明提供的一种基于边缘计算的动态鲁棒多目标优化系统,该系统包括:
13、模型建立模块,用于建立路径规划模型,构建路径规划中优化的动态鲁棒多目标问题的目标函数以及路径规划约束条件,生成地图;
14、数据获取模块,用于采集激光雷达在预设时间段内扫描到的多个连续的障碍物位置数据;
15、参数获取模块,用于采集环境风参数以及所述无人机的姿态数据;
16、路径优化模块,与模型建立模块、数据获取模块和参数获取模块连接,基于蝗虫算法,根据模型建立模块生成的地图、所述多个连续的障碍物位置数据、所述环境风参数以及所述姿态数据,对所述无人机的飞行路径进行规划;
17、边缘计算平台,与模型建立模块、数据获取模块、参数获取模块和路径优化模块连接,基于openfog、azure iot edge等,以管理和运行各种应用程序和服务。
18、进一步,所述模型建立模块,用于建立路径规划模型,构建路径规划中优化的动态鲁棒多目标问题的目标函数以及路径规划约束条件,生成地图,具体包括:
19、s1、确定路径规划地图:采用栅格法生成地图,所述地图模拟了城市道路通行道路的特征,地图中采用不同颜色模拟通行区域、非通行区域、城市道路中拥堵区域,并设定路径规划任务的起点坐标与终点坐标;
20、s2、定义路径规划中优化的动态鲁棒多目标问题为:
21、f1=min∑i∑jdi,j
22、
23、式中,目标问题f1表示车辆总移动距离最短,目标问题f2表示车辆移动路线上经过的拥堵区域数量总和最少;
24、s3、路径规划的约束条件为:
25、
26、式中,表示对路径进行求解时,禁止经过已经到达过的位置,即不可在一条道路上重复通行。
27、进一步,所述预设时间段可以是激光雷达扫描到障碍物位置数据开始后的一端时间,也可以是激光雷达启动时开始计时的一段时间。
28、进一步,所述环境风参数包括所述无人机所处环境的风力、风向。
29、进一步,所述蝗虫算法源于蝗虫活动特征,寻找食物来源是蝗虫群的重要行为,主要仿生原理是将幼虫的小范围移动行为映射为短步长的局部开发,成虫的大范围移动行为映射为长步长的全局探索,以类似“步坦协同”的方式进行寻优。
30、其行为周期可分为两个阶段:探测和开发,该行为的数值模型如下所示:
31、
32、其中xi表示蝗虫i的位置,si表示社交影响,g表示重力影响,a是风平流影响;
33、
34、上式中,s(r)=fer/ler表示社会影响力系数,其中f、l分别为吸引强度参数、吸引尺度参数,n表示种群规模。dij=|xj-xi|,表示个体i与个体j间距;
35、蝗虫所受的重力影响其中g表示引力,表示指向地心的单位向量;
36、风平流影响u表示恒定漂移因子(意为即使没有风也会发生的飞行运动偏移),ew表示指向风向的单位向量。
37、进一步,在所述对所述无人机的飞行路径进行规划之前,所述方法还包括:基于李雅普诺夫函数,消除所述协同运动数据的误差。
38、本发明另一目的在于提供一种实施所述基于边缘计算的动态鲁棒多目标优化系统的基于边缘计算的动态鲁棒多目标优化方法,该方法包括:
39、s21:利用模型建立模块,建立路径规划模型,构建路径规划中优化的动态鲁棒多目标问题的目标函数以及路径规划约束条件,生成地图;利用数据获取模块,采集激光雷达在预设时间段内扫描到的多个连续的障碍物位置数据;利用参数获取模块,用于采集环境风参数以及所述无人机的姿态数据;
40、s22:利用路径优化模块,基于蝗虫算法,根据模型建立模块生成的地图、所述多个连续的障碍物位置数据、所述环境风参数以及所述姿态数据,对所述无人机的飞行路径进行规划;
41、s23:利用边缘计算平台,基于openfog、azure iot edge等,以管理和运行各种应用程序和服务。
42、本发明另一目的在于提供一种计算机设备,所述计算机设备包括存储器和处理器,所述存储器存储有计算机程序,所述计算机程序被所述处理器执行时,使得所述处理器执行所述基于边缘计算的动态鲁棒多目标优化系统的步骤。
43、本发明另一目的在于提供一种计算机可读存储介质,存储有计算机程序,所述计算机程序被处理器执行时,使得所述处理器执行所述基于边缘计算的动态鲁棒多目标优化系统的步骤。
44、本发明另一目的在于提供一种信息数据处理终端,所述信息数据处理终端用于实现所述基于边缘计算的动态鲁棒多目标优化系统。
45、结合上述的技术方案和解决的技术问题,本发明所要保护的技术方案所具备的优点及积极效果为:
46、第一、本发明在无人机遇到动态障碍物时,通过对动态障碍物的运动状态进行预测,规划无人机的初始飞行路径,进而使无人机在飞行时能够有效地避免动态障碍物,防止无人机因为撞到动态障碍物而发生无人机损坏的情况出现。
47、本发明采用边缘计算平台有效降低任务处理的通信开销和网络延迟,缓解了网络和数据中心的处理压力,保证了任务资源的优化分配。
48、本发明在无人机遇到动态障碍物时,通过对动态障碍物的运动状态进行预测,规划无人机的初始飞行路径,进而使无人机在飞行时能够有效地避免动态障碍物,防止无人机因为撞到动态障碍物而发生无人机损坏的情况出现。
49、第二,本发明提供的基于边缘计算的动态鲁棒多目标优化系统,该系统在技术上取得的显著进步主要包括以下几点:
50、1)增强的实时数据处理能力:
51、利用边缘计算平台,系统能够在数据产生的地点即时处理大量信息,减少了对中央处理服务器的依赖。这意味着更快的响应时间和更高的数据处理效率,特别是在对实时性要求较高的无人机飞行路径规划中。
52、2)高度精确的路径优化:
53、通过蝗虫算法和深度学习技术,系统能够高效处理复杂的路径规划问题,包括动态障碍物的识别和规避。这样的路径优化不仅提高了飞行的安全性,也确保了更高的效率和精确性。
54、3)适应性和动态调整能力:
55、强化学习机制使得系统能够基于实时环境数据和飞行反馈不断调整和优化飞行路径。这种动态调整能力使得无人机能够更好地适应复杂和变化的环境条件。
56、4)综合多源数据的高效处理:
57、数据融合技术的应用使得系统能够整合来自不同源(如激光雷达、风速计、姿态传感器)的数据,并提高这些数据的准确性和可靠性。这对于确保无人机飞行的安全和准确至关重要。
58、5)智能资源管理:
59、利用机器学习算法优化边缘计算资源的分配和管理,提高了整个系统的能效和性能。这对于资源有限的边缘计算环境来说尤为重要。
60、6)个性化和精细化的飞行规划:
61、系统能够根据具体的飞行任务和环境条件,提供个性化和精细化的飞行规划。这增加了任务的成功率和无人机的使用效率。
62、本发明提供的系统通过集成边缘计算、蝗虫算法、深度学习、强化学习和数据融合技术,实现了无人机飞行路径规划的显著技术进步,特别是在实时数据处理、路径优化精度、适应性、数据处理效率和智能资源管理方面。
- 还没有人留言评论。精彩留言会获得点赞!