基于K-means算法的多自动引导车协作停泊方法及自动引导车与流程
本发明涉及基于k-means算法的多自动引导车协作停泊方法及自动引导车,属于智能仓储领域。
背景技术:
1、自动引导车在仓储系统中已经有了十分广泛的应用,在传统人工进出库及全自动化的智能仓储中均有自动引导车使用可能,自动引导车的运行效率是在设计自动引导车时的一个重要指标,尤其是货架较多的仓储系统会有多部自动引导车协作运行以提高运输效率。在这种情况下很多自动引导车调度方案、停泊方案应运而生。
2、现已有很多理论提出利用物联网技术将自动引导车作为一个边缘设备,将其载货信息、运行信息、简况状况甚至运行控制等传输在云服务器中,实现数据可视等功能。而自动引导车停泊方案中目前多部自动引导车的协作运行主要为空闲时留有1-2部在泊车位等待,单部自动引导车利用长短期记忆递归神经网络来将自动引导车单日运行进行记录,使自动引导车在空闲时按照从早到晚的运行记录顺序依次停泊在启动时停留的货架。这种方案不能有效提高自动引导车的运行效率,因为当使用自动引导车放货后,下次取货不会严格递归从早到晚按照进入时的顺序进行,其顺序具有一定随机性,例如第一批货物放入自动引导车存放在了一号货架,而第二批货物需要存放在二号货架,恰好自动引导车空闲时二号货架需要取货,若按照长短期记忆递归神经网络算法模型,自动引导车会在一号货架等待,而自动引导车要取二号货架的货物需要从一号货架移动到二号货架,这样就造成了资源的浪费并降低了自动引导车运行的效率。并且,目前此种长短期记忆递归神经网络仅针对单部自动引导车设计,未考虑多部自动引导车之间的协作问题。
3、因此,在目前的自动引导车设计中存在以下两个缺陷,一是无法实现在每天不同时间段根据货架取放货物频率配置其在不同时段空闲时停泊对应货架,二是无法实现根据多批货物同时使用情况协调最优载货路径,实现最少步骤完成运载工作。
技术实现思路
1、鉴于上述问题,本发明提供了基于k-means算法的多自动引导车协作停泊方法及自动引导车,能够根据货运不同时间段的使用习惯优化停泊方案,同时根据多个货运需求寻求最优载货路径,实现最少步骤完成运载工作。
2、在一个实施方式中,一种基于k-means算法的多自动引导车协作停泊方法,该方法采用如下步骤实现:
3、(1)自动引导车控制系统初始化k个样本作为初始聚类中心,k为自然数;其中样本包括自动引导车载货时间、载货数量、货架取放货数据;
4、(2)计算每个样本到k个聚类中心的距离,根据计算结果将样本分到距离最小的聚类中心所对应的类中;
5、(3)针对每个类,重新计算它的聚类中心,即属于该类的所有样本的质心;
6、(4)重复上面(2)、(3)两步,直到达到预定的迭代次数或误差阈值,获得聚类结果;
7、(5)自动引导车车载控制系统根据聚类结果控制自动引导车运行。
8、在该实施方式中,由于样本含有载货时间、载货数量、货架取放货数据等要素,该聚类方式考虑因素更多,聚类结果更合理,通过聚类得到的取放货物需求更贴近取放货物实际需求,该实施方式使用了k-menas算法(又称k均值算法),通过该实施方式,实现了自动引导车在每天不同时段空闲时刻停泊时,能更好的适应货物搬运习惯,同时由于该实施方式能够实时学习货物搬运需求,其能实时更新,避免了早期设定不符合货物搬运新需求的问题,达到了实时满足货物搬运实际需求的效果。
9、优选的,上述停泊方法中,步骤(1)的初始化采用的计算公式为,其中为损失函数,为的期望。
10、在该实施方式中,该计算公式为gapstatistic(间隔统计量)方法,采用该方法,对于样本的聚类更合理,更贴近于货运实际,反映效果更合理,达到了进一步优化停泊方案的技术效果。
11、优选的,将k-means算法与蜂群算法集成到自动引导车中,自动引导车通过k-means算法将自动引导车停留在适应货运需求的货架,在仓储系统临时需求自动引导车到达指定货架时,自动引导车控制器接收运行指令,将k-means算法求解结果带入蜂群算法中,从而使蜂群算法更快速的求解出适应值,然后根据适应值求解出最佳的解,并对应运行自动引导车。
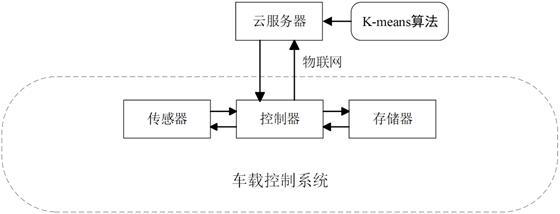
12、在一个实施方式中,一种自动引导车,其具有如下设备:
13、传感器,其获取自动引导车内的载货数量、载货时间、货架取放货数据;
14、存储器,其存储传感器检测数据和/或存储执行前述实施方式的停泊方法得到的模型数据;
15、控制器,其能够执行存储器的模型数据和/或将存储器存储的检测数据传输给服务器,通过服务器获取执行前述实施方式的停泊方法得到的模型数据,并执行该模型数据。
16、优选地,在上述自动引导车中,当所述控制器为将存储器存储的检测数据传输给服务器,通过服务器获取执行前述实施方式的停泊方法得到的模型数据,并执行该模型数据时,自动引导车还具有通讯模块,其能够将控制器的检测数据传输至服务器,并将服务器计算得到的模型数据传输至控制器中。
17、优选地,在上述自动引导车中,所述通讯模块为无线通讯模块或有线通信模块。
18、优选地,在上述自动引导车中,其获取载货数量的传感器也可替换为视频采集装置或摄像装置。
19、本发明通过使用k-means的机器学习来获取自动引导车货物搬运规律从而预测每天不同时段自动引导车在空闲时刻自动停泊相应地货架,该方法可以达到自动引导车运行的最高运行效率,且能够实时根据货物的习惯变化调整控制策略;此外,本发明还可通过人工蜂群算法获取货物需求,计算货物需求对应最佳自动引导车运行方案,提高了自动引导车运行效率,两种方式可以单独使用,也可以结合使用以进一步提升仓储系统出入库效率。
技术特征:
1.一种基于k-means算法的多自动引导车协作停泊方法,其特征在于:
2.根据权利要求1所述的基于k-means算法的多自动引导车协作停泊方法,其特征在于:
3.根据权利要求1所述的基于k-means算法的多自动引导车协作停泊方法,其特征在于:将k-means算法与蜂群算法集成到自动引导车中,自动引导车通过k-means算法将自动引导车停留在适应货运需求的货架,在仓储系统临时需求自动引导车到达指定货架时,自动引导车控制器接收运行指令,将k-means算法求解结果带入蜂群算法中,从而使蜂群算法更快速的求解出适应值,然后根据适应值求解出最佳的解,并对应运行自动引导车。
4.一种自动引导车,其特征在于,其具有如下设备:
5.根据权利要求4所述的一种自动引导车,其特征在于:当所述控制器为将存储器存储的检测数据传输给服务器,通过服务器获取执行权利要求1所述的基于k-means算法的多自动引导车协作停泊方法得到的模型数据,并执行该模型数据时,自动引导车还具有通讯模块,其能够将控制器的检测数据传输至服务器,并将服务器计算得到的模型数据传输至控制器中。
6.根据权利要求5所述的一种自动引导车,其特征在于:所述通讯模块为无线通讯模块或有线通信模块。
7.根据权利要求5所述的一种自动引导车,其特征在于:其获取载货数量的传感器可替换为视频采集装置或摄像装置。
技术总结
本发明涉及基于K‑means算法的多自动引导车协作停泊方法及自动引导车,为了解决现有多个自动引导车协作运行时,通过设置固定时间,自动引导车固定停留货架,造成运行时无法适应真实需求的技术问题,本发明通过使用K‑means的机器学习来获取自动引导车货物搬运规律从而预测每天不同时段自动引导车在空闲时刻自动停泊相应地货架,该方法可以达到自动引导车运行的最高运行效率,且能够实时根据货物的习惯变化调整控制策略。
技术研发人员:林海都,王常成,黄俊辉,赵健英
受保护的技术使用者:成都电科星拓科技有限公司
技术研发日:
技术公布日:2024/2/19
- 还没有人留言评论。精彩留言会获得点赞!