基于领航者的无人机集群行为控制方法、系统及设备
本技术涉及无人机控制,尤其涉及一种基于领航者的无人机集群行为控制方法、系统及设备。
背景技术:
1、自然界中广泛存在如蜂群、鱼群和鸟群等由大量自主个体所组成的群体,通过个体间简单的交互,群体往往可以涌现出复杂的迁徙、捕食等丰富的集体运动,这些高度协调有序的运动被称为集群行为。通过将对集群行为的研究与无人机集群技术相结合,可以使无人机通过简单的机间通讯来完成无人机集群复杂的侦查、搜救定位、资源勘探等任务,从而使无人机集群具有更强的态势感知能力、任务执行效率和更高的容错性。然而传统基于规则的方法,规则死板,并且随着无人机架数的增加,通讯资源也随之急剧增加,在无人机数量增多时易产生维度爆炸现象,目前对无人机行为控制所采用的路径规划等控制方法可扩展性差,无法适应复杂环境,阻碍了无人机集群的大规模应用。
技术实现思路
1、本技术旨在至少解决现有技术中存在的技术问题之一。为此,本技术提出基于领航者的无人机集群行为控制方法、系统及设备,能够在降低通讯资源占用的基础上,有效增强了无人机集群的扩展性。
2、一方面,本技术实施例提供了一种基于领航者的无人机集群行为控制方法,包括以下步骤:
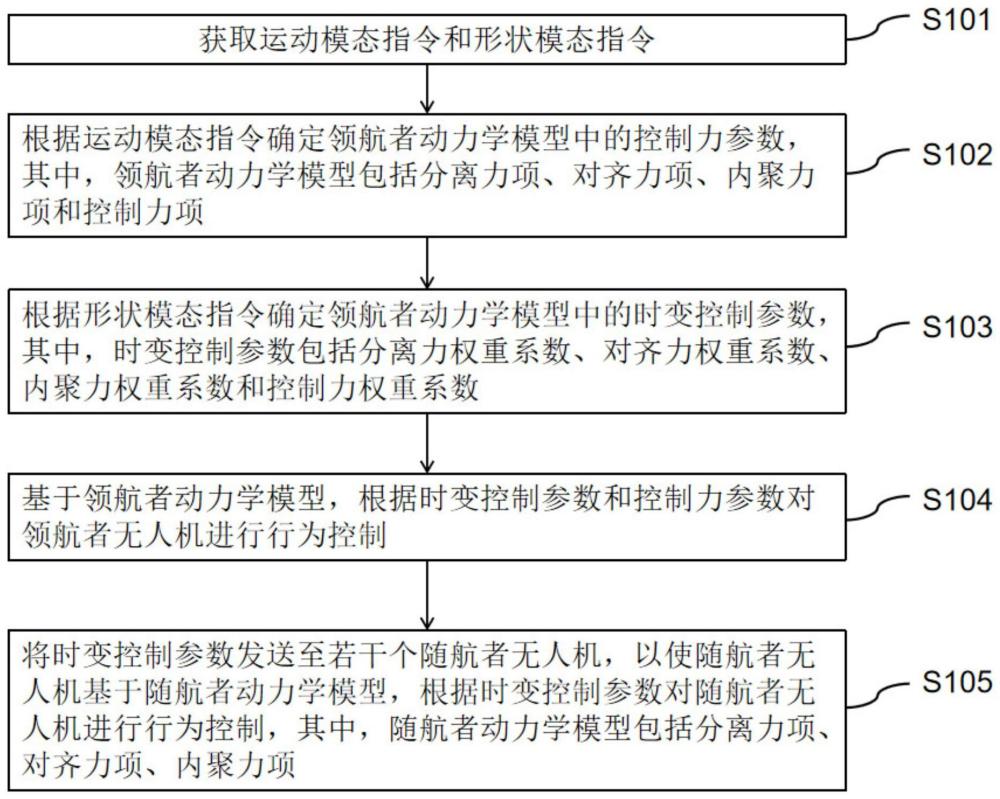
3、获取运动模态指令和形状模态指令;
4、根据所述运动模态指令确定领航者动力学模型中的控制力参数,其中,所述领航者动力学模型包括分离力项、对齐力项、内聚力项和控制力项;
5、根据所述形状模态指令确定领航者动力学模型中的时变控制参数,其中,所述时变控制参数包括分离力权重系数、对齐力权重系数、内聚力权重系数和控制力权重系数;
6、基于领航者动力学模型,根据所述时变控制参数和所述控制力参数对领航者无人机进行行为控制;
7、将所述时变控制参数发送至若干个随航者无人机,以使随航者无人机基于随航者动力学模型,根据所述时变控制参数对随航者无人机进行行为控制,其中,随航者动力学模型包括分离力项、对齐力项、内聚力项。
8、根据本技术一些实施例,所述基于领航者的无人机集群行为控制方法还包括以下步骤:
9、获取所述领航者无人机的预设邻居范围,所述预设邻居范围包括分离力作用范围、对齐力作用范围和内聚力作用范围;
10、根据所述预设邻居范围确定所述领航者无人机的相邻无人机,其中,所述相邻无人机为预设邻居范围内的其他领航者无人机。
11、根据本技术一些实施例,所述根据所述预设邻居范围确定所述领航者无人机的相邻无人机,包括以下步骤:
12、根据所述预设邻居范围中的分离力作用范围确定所述分离力作用范围内的若干个第一邻居,其中,所述分离力作用范围通过分离力半径确定;
13、根据所述预设邻居范围中的对齐力作用范围确定所述对齐力作用范围内的若干个第二邻居,其中,所述对齐力作用范围通过对齐力半径确定;
14、根据所述预设邻居范围中的内聚力作用范围确定所述内聚力作用范围内的若干个第三邻居,其中,所述内聚力作用范围通过内聚力半径确定;
15、将若干个所述第一邻居、若干个所述第二邻居和若干个所述第三邻居确定为所述领航者无人机的相邻无人机。
16、根据本技术一些实施例,所述根据所述运动模态指令确定领航者动力学模型中的控制力参数,包括以下步骤:
17、根据运动模态指令确定领航者运动模态;
18、根据所述相邻无人机的数量计算所述领航者无人机的受力情况;
19、根据所述领航者运动模态和所述受力情况确定领航者动力学模型中的控制力参数。
20、根据本技术一些实施例,所述根据所述相邻无人机的数量计算所述领航者无人机的受力情况,包括以下步骤:
21、获取领航者信息、邻居信息和集群期望平均距离,其中,所述领航者信息包括领航者无人机的第一速度信息和第一位置信息,所述邻居信息包括邻居的第二速度信息和第二位置信息;
22、根据所述第一邻居的数量、所述第一位置信息和所述第一邻居的第二位置信息计算得到所述领航者无人机所受分离力;
23、根据所述第二邻居的数量、所述第一速度信息和所述第二邻居的第二速度信息计算得到所述领航者无人机所受对齐力;
24、根据所述第三邻居的数量、所述第一位置信息、所述第三邻居的第二位置信息和所述集群期望平均距离计算得到所述领航者无人机所受内聚力。
25、根据本技术一些实施例,所述根据所述形状模态指令确定领航者动力学模型中的时变控制参数,包括以下步骤:
26、根据形状模态指令调整领航者无人机的预设邻居范围的作用半径;
27、根据所述作用半径的变化结果调整领航者动力学模型中的时变控制参数。
28、根据本技术一些实施例,所述领航者动力学模型还包括摩擦力项,所述摩擦力项用于根据当前速度和期望速度确定摩擦力,所述时变控制参数还包括摩擦力权重系数。
29、另一方面,本技术实施例还提供一种基于领航者的无人机集群行为控制系统,所述基于领航者的无人机集群行为控制系统应用于无人机集群的领航者无人机中,所述无人机集群包括领航者无人机和若干个随航者无人机,所述基于领航者的无人机集群行为控制系统包括:
30、第一模块,用于获取运动模态指令和形状模态指令;
31、第二模块,用于根据所述运动模态指令确定领航者动力学模型中的控制力参数,其中,所述领航者动力学模型包括分离力项、对齐力项、内聚力项和控制力项;
32、第三模块,用于根据所述形状模态指令确定领航者动力学模型中的时变控制参数,其中,所述时变控制参数包括分离力权重系数、对齐力权重系数、内聚力权重系数和控制力权重系数;
33、第四模块,用于基于领航者动力学模型,根据所述时变控制参数和所述控制力参数对领航者无人机进行行为控制;
34、第五模块,用于将所述时变控制参数发送至若干个随航者无人机,以使随航者无人机基于随航者动力学模型,根据所述时变控制参数对随航者无人机进行行为控制,其中,随航者动力学模型包括分离力项、对齐力项、内聚力项。
35、另一方面,本技术实施例还提供一种基于领航者的无人机集群行为控制系统,述基于领航者的无人机集群行为控制系统包括领航者无人机和若干个随航者无人机:
36、所述领航者无人机用于获取运动模态指令和形状模态指令;根据所述运动模态指令确定领航者动力学模型中的控制力参数,其中,所述领航者动力学模型包括分离力项、对齐力项、内聚力项和控制力项;根据所述形状模态指令确定领航者动力学模型中的时变控制参数,其中,所述时变控制参数包括分离力权重系数、对齐力权重系数、内聚力权重系数和控制力权重系数;基于领航者动力学模型,根据所述时变控制参数和所述控制力参数对领航者无人机进行行为控制;将所述时变控制参数发送至若干个随航者无人机;
37、所述随航者无人机用于接收所述时变控制参数,基于领航者动力学模型,根据所述时变控制参数和所述控制力参数对领航者无人机进行行为控制,其中,随航者动力学模型包括分离力项、对齐力项、内聚力项。
38、另一方面,本技术实施例还提供一种电子设备,包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现以下步骤:
39、获取运动模态指令和形状模态指令;
40、根据所述运动模态指令确定领航者动力学模型中的控制力参数,其中,所述领航者动力学模型包括分离力项、对齐力项、内聚力项和控制力项;
41、根据所述形状模态指令确定领航者动力学模型中的时变控制参数,其中,所述时变控制参数包括分离力权重系数、对齐力权重系数、内聚力权重系数和控制力权重系数;
42、基于领航者动力学模型,根据所述时变控制参数和所述控制力参数对领航者无人机进行行为控制;
43、将所述时变控制参数发送至若干个随航者无人机,以使随航者无人机基于随航者动力学模型,根据所述时变控制参数对随航者无人机进行行为控制,其中,随航者动力学模型包括分离力项、对齐力项、内聚力项。
44、本技术上述的技术方案至少具有如下优点或有益效果之一:通过控制力参数和时变控制参数对领航者无人机进行行为控制,将传统固定参数模型拓展为时变参数模型,通过发送时变控制参数以控制随航者无人机进行行为控制,从而控制无人机集群行为,能够实现分布式控制,在降低通讯资源占用的基础上,有效增强了无人机集群的扩展性。
- 还没有人留言评论。精彩留言会获得点赞!