一种载人载物机器人轨迹跟踪控制系统及其控制方法
本发明涉及机器人轨迹跟踪控制系统,尤其涉及一种载人载物机器人轨迹跟踪控制系统及其控制方法。
背景技术:
1、目前,在机场中,载人机器人可主动询问旅客需求,引导旅客使用自助设备,如:行李交运、值机、身份核验等,实现便捷乘机;在大型商场中,载人机器人可以为旅客提供乘载引导服务;在医院中,载人机器人能够协助医护人员开展患者监测、药物配送以及床单更换等工作,减轻了医护人员的负担。
2、载人载物机器人系统在非完整约束、受外部干扰和模型不确定性影响下的轨迹跟踪精度差,因此,提出了一种载人载物机器人轨迹跟踪控制系统。
技术实现思路
1、本发明的目的是针对背景技术中存在载人载物机器人系统在非完整约束、受外部干扰和模型不确定性影响下的轨迹跟踪精度差的问题,提出一种载人载物机器人轨迹跟踪控制系统。
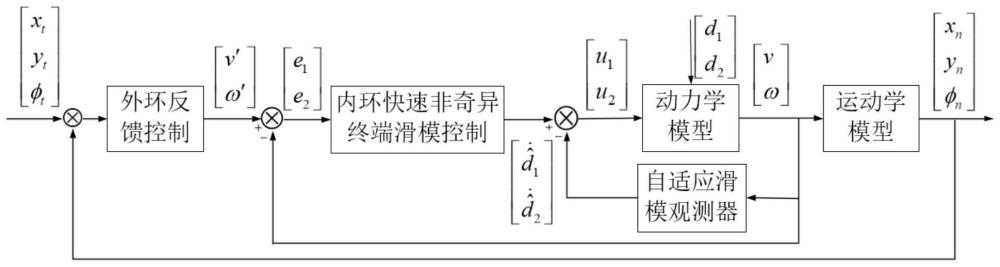
2、第一方面,本发明的技术方案:一种载人载物机器人轨迹跟踪控制系统,包括:
3、自适应滑模观测器,在有限时间内评估扰动信号,生成观测信息;
4、内环快速非奇异终端滑模控制器,基于所述自适应滑模观测器生成的所述观测信息设计内环快速非奇异终端滑模控制方法;
5、外环反馈控制器,根据载人载物机器人的跟踪轨迹位姿,为所述内环快速非奇异终端滑模控制器生成输入信息;
6、还包括载人载物机器人系统模型,载人载物机器人系统模型包括载人载物机器人运动学模型和载人载物机器人动力学模型;
7、所述载人载物机器人运动学模型中,om代表载人载物机器人的质心,它与两个驱动轮的几何中心重合。[xn yn φn]代表载人载物机器人在全局笛卡尔坐标系中的位置,[omxm ym]表示载人载物机器人的位置和姿态坐标,φn是载人载物机器人的方位角,载人载物机器人的位置和姿态可以表示为:
8、
9、运动学模型如下所示:
10、
11、其中,v和ω分别是载人载物机器人的线速度和角速度,载人载物机器人的线速度和角速度之间的关系由以下方程表示:
12、
13、根据(3)式得出下式:
14、
15、其中,r是轮子的半径,c是从几何中心到左右驱动轮的距离,ωr和ωl分别是右轮和左轮的角速度。
16、可选的,所述载人载物机器人动力学模型由下式表达:
17、
18、其中m是载人载物机器人的总质量,f′是纵向力,i是绕轴的转动惯量,t′是角动量,d表示不确定的扰动;
19、l1表示为的上限,l2表示d二阶导数上限,在d不确定的情况下,扰动满足:
20、
21、其中t′和f′由左右两个车轮的扭矩决定,具体形式如公式(7)所示;
22、
23、其中ur和ul是电机的输入电压,lm和rm是电机的电感和电阻,h是传动比,te是反电动势,tt是电机转动常数,通过结合方程(5)和(7)得出:
24、
25、之后进行下式转换:
26、ur+ul=u1,ur-ul=u2(9)
27、结合(8)式和(9)式得出:
28、
29、其中参数的具体形式如下所示:
30、
31、可选的,所述自适应滑模观测器包括辅助变量和滑模面,
32、公式(10)中的变量v由下式表达:
33、
34、系统变量v可以表示为下式:
35、
36、所述辅助变量为:
37、e=b-y2 (14)
38、其中b由下式表达:
39、
40、其中a1d和a2d是正实数,γ1d<1,γ2d>1,vb被设计为确保在有限时间内e和扰动d1评估误差收敛到0,所述滑模面表示为:
41、
42、假设vb由下式表达:
43、
44、其中ηb是实数,ηc是满足不等式ηc>l1的增益,ηc在(17)中通过以下公式更新,
45、ηc(t)=-rb(t)sign(λb(t))
46、
47、式(18)中的参数由下式所示:
48、rb(t)=r0b+ρb(t)
49、
50、
51、可选的,所述载人载物机器人的跟踪轨迹位姿为kt=[xt yt φt]t,实际位姿为kn=[xn yn φn]t,从方程(1)和(2)中,得到载人载物机器人运动学误差模型如下:
52、
53、位置误差模型可以表达成:
54、
55、其中vt和ωt由下式描述:
56、
57、
58、公式(21)中的v′和ω′由下式控制率确定:
59、
60、可选的,所述内环快速非奇异终端滑模控制器包括跟踪误差r1和滑模面,跟踪误差r1被描述成:
61、r1=v-v′ (24)
62、滑模面由下式描述:
63、
64、其中sig(p)q=|p|q sign(p),β1>0,1<r1<2,q>0,d′1表示未知扰动,表示扰动的观测值,如果所采用的扰动观测器收敛到t=t,在t≥t时可以表示为以下方程:
65、
66、可选的,还包括载人载物机器人设备,所述载人载物机器人设备包括:
67、控制模组、车体模组、避障模组、人机交互模组;
68、所述控制模组用于对所述载人载物机器人设备的运行进行控制,其分别与所述车体模组、避障模组、人机交互模组电性连接;其中,
69、所述车体模组,用于在所述控制模组的控制下实现所述载人载物机器人设备的行驶;
70、所述避障模组,用于实现所述载人载物机器人设备的自主导航和安全行驶;
71、所述人机交互模组,用于实现所述载人载物机器人设备与用户之间的交互;
72、所述载人载物机器人设备还包括座椅模组,所述座椅模组固定在所述车体模组上;所述座椅模组包括座椅、脚踏板以及座椅扶手。
73、可选的,所述车体模组包括:车体和运动装置;
74、所述运动装置包括驱动轮、从动轮,以及电机;
75、所述避障模组包括:测距感知单元、定位单元和视觉系统;
76、所述测距感知单元用于采集数据以完成室内或室外环境3d建图;所述定位单元用于对当前位置进行定位;所述视觉系统用于行人和环境识别,其包括相机和处理单元;
77、所述人机交互模组包括:驱动控制模块、显示器,以及遥控手柄;
78、所述驱动控制模块用于接收人机交互信息并驱动所述显示器显示目的地信息和旅客个人信息;所述遥控手柄用于乘客自行手动控制所述载人载物机器人设备。
79、第二方面,本发明提出了一种载人载物机器人轨迹跟踪控制方法,应用于第一方面所述的载人载物机器人轨迹跟踪控制系统,所述方法包括:
80、在有限时间内评估扰动信号并生成观测信息,内环快速非奇异终端滑模控制器利用生成的观测信息设计内环快速非奇异终端滑模控制方法;
81、根据载人载物机器人的跟踪轨迹位姿,为内环快速非奇异终端滑模控制器生成输入信息
82、与现有技术相比,本发明具有如下有益的技术效果:
83、1)本发明通过设置自适应滑模观测器具有评估广泛扰动,其中第一导数的上限未知且第二导数有界,用于估计载人载物机器人的未知扰动,实现了更高的扰动估计精度。
84、2)通过对载人载物机器人的自适应滑模观测器采用基于指数函数的方法替换滑模中的sign函数,以减轻和减小抖动,确保跟踪误差在有限时间内稳定,并增强在模型不确定性和扰动情况下的跟踪精度和抗干扰性。
85、3)本发明通过设置内环快速非奇异终端滑模控制器和外环反馈控制器组成,能够提升载人载物机器人的x轴、y轴和方位角跟踪性能。
86、本发明实现了更高的扰动估计精度,确保跟踪误差在有限时间内稳定,并增强在模型不确定性和扰动情况下的跟踪精度和抗干扰性,同时能够提升载人载物机器人的x轴、y轴和方位角跟踪性能,增强载人载物机器人系统在非完整约束、受外部干扰和模型不确定性影响下的轨迹跟踪精度。
- 还没有人留言评论。精彩留言会获得点赞!