室内物品飞行搬运机器人定位导航方法和装置、存储介质与流程
本发明涉及飞行机器人控制,具体涉及一种室内物品飞行搬运机器人定位导航方法和装置、存储介质。
背景技术:
1、飞行机器人作为一种由无线电遥控或者自身程序控制装置操纵的无人驾驶飞行器,凭借着在三维空间中灵活机动的特性得到广泛应用,在民用领域中,可以进行室内搬运、航空摄影、电网巡检等工作。纵观这些应用场景,飞行机器人要自主完成飞行作业会面临很多难题,首要的就是飞行机器人的定位导航问题,这是顺利完成各项任务的前提条件。飞行机器人定位导航可以看作是飞行机器人安全、快速地到达目标位置过程中进行路径规划和实现的过程,主要涉及定位、规划和控制三个方面。定位是飞行机器人对自身位置和周围环境的掌握,规划是为了到达某一目的地而做出决策和计划的过程,飞行控制是调整飞行姿态完成规划和设定任务的过程。目前,飞行机器人的定位方式主要还是依赖于全球定位系统,也就是卫星信号,通过卫星不断地对机体进行定位来实现高动态导航,但应用场景大多停留在空旷开阔和卫星信号较好的环境中,存在极大的局限性。当飞行机器人工作在室内环境中时,由于卫星信号弱化丢失或缺少硬件平台的约束,将导致其无法为自身提供准确的位置信息,同时也不能获取到周围有效的环境信息,使得导航的可靠性降低,相关的路径规划、避障、控制等功能也无法实现。
技术实现思路
1、本发明主要解决飞行机器人工作在室内环境中时,由于卫星信号弱化丢失或缺少硬件平台的约束,无法有效进行定位导航的技术问题。
2、根据第一方面,一种实施例中提供一种室内物品飞行搬运机器人定位导航方法,所述室内物品飞行搬运机器人搭载有多种传感器,所述室内物品飞行搬运机器人定位导航方法包括:
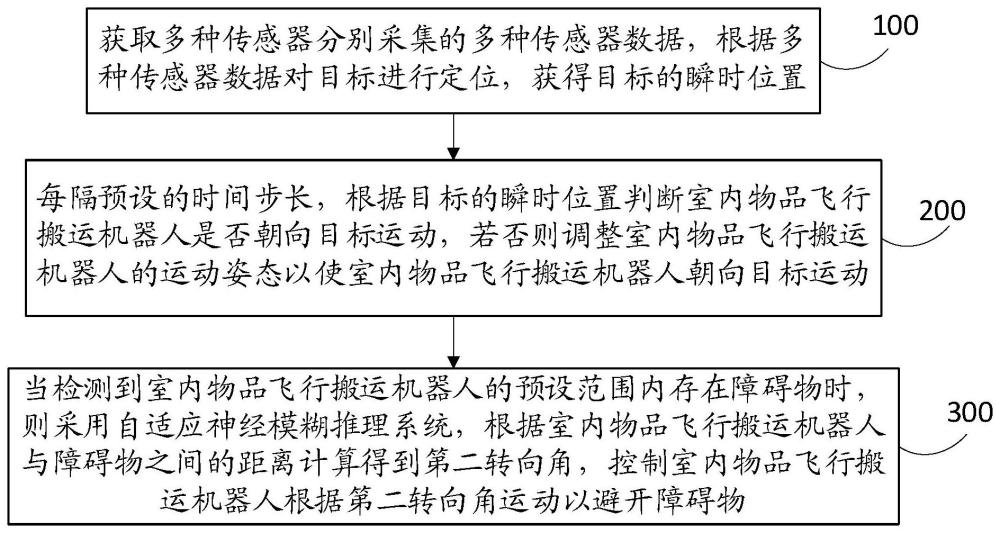
3、获取所述多种传感器分别采集的多种传感器数据,根据所述多种传感器数据对目标进行定位,获得目标的瞬时位置;
4、每隔预设的时间步长,根据目标的瞬时位置判断所述室内物品飞行搬运机器人是否朝向目标运动,若否则调整所述室内物品飞行搬运机器人的运动姿态以使所述室内物品飞行搬运机器人朝向目标运动;
5、当检测到所述室内物品飞行搬运机器人的预设范围内存在障碍物时,则采用自适应神经模糊推理系统,根据所述室内物品飞行搬运机器人与所述障碍物之间的距离计算得到第二转向角,控制所述室内物品飞行搬运机器人根据所述第二转向角运动以避开所述障碍物。
6、一些实施例中,所述室内物品飞行搬运机器人包括前定位模块和后定位模块,所述根据目标的瞬时位置判断所述室内物品飞行搬运机器人是否朝向目标运动包括:
7、获取所述前定位模块定位的坐标r(x1,y1)和所述后定位模块定位的坐标f(x3,y3),以及目标的瞬时位置的坐标t(x2,y2);
8、获取从坐标r(x1,y1)到目标的连线l,其中连线l的公式表示为:y2=m(x2-x1)+y1,其中m是系数;
9、根据坐标f(x3,y3)判断所述室内物品飞行搬运机器人前进的方向是否位于连线l上,若是则所述室内物品飞行搬运机器人朝向目标运动,若否则所述室内物品飞行搬运机器人未朝向目标运动。
10、一些实施例中,所述根据坐标f(x3,y3)判断所述室内物品飞行搬运机器人前进的方向是否位于连线l上包括:
11、获取连线l上距离坐标f(x3,y3)最近的点的坐标m(x,y);
12、计算点f(x3,y3)与点m(x,y)之间的距离d,其中距离d的计算公式为
13、判断距离d是否小于预设的第一最小距离阈值d1,若是则所述室内物品飞行搬运机器人前进的方向位于连线l上,若否则所述室内物品飞行搬运机器人前进的方向不位于连线l上。
14、一些实施例中,调整所述室内物品飞行搬运机器人的运动姿态以使所述室内物品飞行搬运机器人朝向目标运动包括:
15、将所述室内物品飞行搬运机器人自身前进方向与连线l的夹角作为第一转向角,控制所述室内物品飞行搬运机器人根据所述第一转向角调整运动姿态以朝向目标运动。
16、一些实施例中,所述室内物品飞行搬运机器人与障碍物之间的距离包括左距离、前距离和右距离,其中左距离指所述室内物品飞行搬运机器人与左侧障碍物之间的距离,前距离指所述室内物品飞行搬运机器人与前方障碍物之间的距离,右距离指所述室内物品飞行搬运机器人与右侧障碍物之间的距离;
17、所述当检测到所述室内物品飞行搬运机器人的预设范围内存在障碍物时,则采用自适应神经模糊推理系统,根据所述室内物品飞行搬运机器人与所述障碍物之间的距离计算得到第二转向角,包括:
18、当所述左距离、所述前距离和所述右距离中的至少一个小于预设的第二最小距离阈值d2时,则采用自适应神经模糊推理系统,根据所述左距离、所述前距离和所述右距离计算得到第二转向角。
19、一些实施例中,所述自适应神经模糊推理系统包括模糊化层、规则层、归一化层、评估层和解模糊层;所述自适应神经模糊推理系统构建有八个模糊规则,模糊规则的表达式为rule i(i∈1,2,…,8):if x is ai and y is bi and z is ci,then gi=pix+qiy+riz+si,其中rule i表示第i个模糊规则,x,y和z为所述自适应神经模糊推理系统的输入,ai,bi和ci为预设的第i个模糊规则的模糊集,pi,qi,ri和si为第i个模糊规则的结果参数,pi,qi,ri和si为区间[0,1]内的随机数,gi为第i个模糊规则的输出;
20、采用自适应神经模糊推理系统,根据所述左距离、所述前距离和所述右距离计算得到第二转向角,包括:
21、将所述左距离、所述前距离和所述右距离分别作为所述自适应神经模糊推理系统的输入x,y和z,经过所述自适应神经模糊推理系统的计算输出第二转向角g;
22、其中,所述模糊化层用于使用隶属度函数计算得到输入x对模糊集ai的隶属度输入y对模糊集bi的隶属度和输入z对模糊集ci的隶属度其中隶属度函数的表达式为:
23、
24、其中ai、bi和ci是第i个模糊规则的前置参数;
25、所述规则层用于根据各模糊规则对应的隶属度计算各模糊规则的激发强度,其中每个模糊规则的激发强度为该模糊规则对应的隶属度的乘积,用公式表示为其中wi为第i个模糊规则的激发强度;
26、所述归一化层用于对每个模糊规则的激发强度进行归一化,得到归一化后的激发强度,用公式表示为其中为第i个模糊规则归一化后的激发强度;
27、所述评估层用于计算每个模糊规则的输出,其中第i个模糊规则的输出用公式表示为
28、所述解模糊层用于根据各模糊规则的输出o4,i进行解模糊,得到所述自适应神经模糊推理系统的输出o5,用公式表示为
29、所述第二转向角g=o5。
30、一些实施例中,对于所述左距离、所述前距离和所述右距离中除小于第二最小距离阈值d2外的其他距离,若存在大于预设的最大距离阈值的距离,则采用所述最大距离阈值替代该距离作为所述自适应神经模糊推理系统相应的输入。
31、一些实施例中,所述的室内物品飞行搬运机器人定位导航方法还包括:每次计算得到第二转向角g后,通过最小二乘法估计第二转向角g的误差值e,将误差值e向后传播,采用梯度下降法更新所述前置参数。
32、根据第二方面,一种实施例中提供一种室内物品飞行搬运机器人定位导航装置,包括:
33、目标定位模块,用于获取所述多种传感器分别采集的多种传感器数据,根据所述多种传感器数据对目标进行定位,获得目标的瞬时位置;
34、全局导航控制器,与所述目标定位模块连接,用于每隔预设的时间步长,根据目标的瞬时位置判断所述室内物品飞行搬运机器人是否朝向目标运动,若否则调整所述室内物品飞行搬运机器人的运动姿态以使所述室内物品飞行搬运机器人朝向目标运动;
35、局部避障控制器,用于当检测到所述室内物品飞行搬运机器人的预设范围内存在障碍物时,采用自适应神经模糊推理系统,根据所述室内物品飞行搬运机器人与所述障碍物之间的距离计算得到第二转向角,控制所述室内物品飞行搬运机器人根据所述第二转向角运动以避开所述障碍物。
36、根据第三方面,一种实施例中提供一种计算机可读存储介质,所述介质上存储有程序,所述程序能够被处理器执行以实现上述第一方面任一实施例的室内物品飞行搬运机器人定位导航方法。
37、依据上述实施例的室内物品飞行搬运机器人定位导航方法/装置,基于多种传感器数据进行目标定位,获得目标的瞬时位置,根据目标的瞬时位置判断室内物品飞行搬运机器人是否朝向目标运动,若否则调整室内物品飞行搬运机器人的运动姿态以使其朝向目标运动,而当检测到室内物品飞行搬运机器人遇到障碍物时,则采用自适应神经模糊推理系统,根据室内物品飞行搬运机器人与障碍物之间的距离计算得到第二转向角,使室内物品飞行搬运机器人根据第二转向角运动以避开障碍物。由于结合了基于多传感器的全局定位导航逻辑和基于自适应神经模糊推理系统的局部避障逻辑,可以有效定位目标,保持室内物品飞行搬运机器人朝向目标飞行,同时避开室内物品飞行搬运机器人在从起点到目标点的过程中出现的障碍物,提高室内物品搬运效率。本发明采用多传感器融合数据来实现对目标的定位导航,可以通过组合来自多个传感器的信息来提高数据的准确性和可靠性,有助于减少测量中的误差和不确定性。
- 还没有人留言评论。精彩留言会获得点赞!