一种半球谐振陀螺的半球谐振子振动幅值控制系统及方法与流程
本发明涉及陀螺仪,尤其涉及一种半球谐振陀螺的半球谐振子振动幅值控制系统及方法。
背景技术:
1、随着各国军事科技的发展,现代战争的作战模式正在转变,实现这些转变的原因之一是武器系统逐渐运用了惯性导航设备。目前惯性传感器领域新兴的陀螺为半球谐振陀螺,半球谐振陀螺具有测量精度高、稳定性和可靠性高、工作寿命长、体积小、噪声低、对加速度不敏感,有良好的抗冲击性,能承受大的机动过载,抗辐射能力强,独有的瞬间断电工作保持能力等优势。半球谐振陀螺是利用半球壳唇缘的径向振动驻波进动效应来感测基座旋转的一种哥式振动陀螺,主要由激励罩、半球谐振子和含有信号检测电极(位移拾振传感器)的基座三部分构成。激励罩位于陀螺仪的顶端,其上有分布电极。在谐振子加工完毕后要在谐振子表面和激励罩的分布电极处进行金属镀膜,从而使谐振子与激励罩分布电极处形成电容器。根据电容器原理,当对激励罩上的离散激励电极或环形激励电极施加激励电压时,电极将对谐振子产生电力作用,进而提供谐振子振动所需要的能量。激励电极产生的激励力是实现谐振子振动振幅控制的控制力。激励电极限主要是为了补偿谐振子震动过程中由于阻尼作用导致的振幅减小,目前的振幅控制都是在基于基座电极检测振幅并根据检测的振幅结果进行施力补偿,这种方式存在的问题是检测到振幅衰减后才进行计算、控制、施力、补偿,振幅的补偿是滞后于振幅衰减,振幅衰减已经发生,造成的误差已经影响到陀螺仪的精度,如果在幅度衰减前就将振幅进行补偿,使得振幅保持在参考振幅范围内,那将进一步提升陀螺仪的精度。
技术实现思路
1、针对上述现有技术中振幅补偿滞后于振幅衰减,导致陀螺仪精度不高的问题,提供一种可对振幅衰减进行预判,在振幅衰减之前就进行振幅补偿的控制系统和方法,具体方案如下:
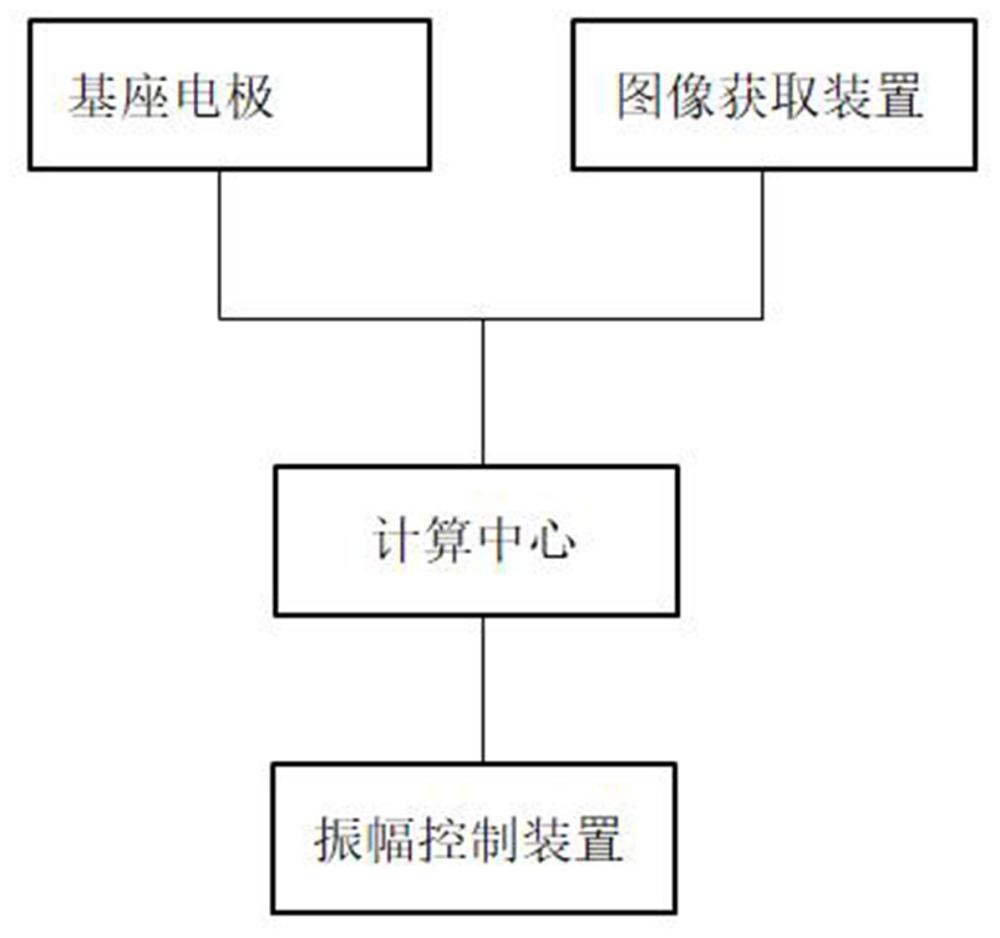
2、一种半球谐振陀螺的半球谐振子振动幅值控制系统,包括振幅检测装置、计算中心、振幅控制装置,振幅检测装置检测到的振幅信号包括电信号和图像信号,所述计算中心可根据所述振幅检测装置检测到的振幅信号得到谐振子的振幅变化规律和趋势,并控制所述振幅控制装置进行能量补偿。
3、进一步地,所述振幅检测装置包括:
4、基座电极,用于通过电信号检测谐振子的振幅,和图像获取装置,用于通过图像获取谐振子的形变信息,进而获得谐振子振幅图像;所述计算中心同时根据所述基座电极和所述图像获取装置检测的振幅信息进行综合分析判断谐振子的振幅变化规律和变化趋势,得到能量与振幅的关系,生成能量补偿方案。
5、进一步地,所述计算中心同时根据所述基座电极和所述图像获取装置检测的振幅信息进行综合分析判断谐振子的振幅变化规律和变化趋势,得到能量与振幅的关系,生成能量补偿方案包括:将基座电极获取的电信号转化为振幅图像ⅰ,将通过图像获取装置获得的图像信号转化为振幅图像ⅱ,以振幅图像ⅰ为模板,将每一帧的振幅图像ⅱ和振幅图像ⅰ转化为特征向量后进行相似度计算,当所述相似度超过预设阈值时,所述计算中心将此时的振幅值输入振幅能量计算模块,振幅能量计算模块根据振幅进行能量补偿计算,得到不同振幅下的能量补偿值,形成能量补偿方案。
6、进一步地,所述相似度计算公式如下:
7、其中,x为特征向量1和特征向量2之间的匹配相关系数,系数越大表示相似性越大,a为模板中特征向量的坐标,为两个特征向量之间的偏移量, 为特征向量1的相关系数, 为特征向量2的相关系数。
8、进一步地,所述振幅能量计算模块通过以下公式计算能量补偿值:
9、q=k(a0-a)+b
10、其中,q为能量补偿值,k为补偿系数,a为实际振幅,a0表示最大振幅,b为修正因子。
11、进一步地,为了更清楚的获取振幅图像信息,所述谐振子上设有标记,用于在谐振子振动时辅助获取谐振子形变信息。
12、进一步地,本发明还基于上述半球谐振陀螺的半球谐振子振动幅值控制系统,提供一种半球谐振陀螺的半球谐振子振动幅值控制方法,包括以下步骤:
13、基座电极和图像获取装置检测谐振子振幅,并将振幅信息传输至计算中心;
14、计算中心对振幅信息进行分析判断并确定能量补偿方案;
15、计算中心控制振幅控制装置对谐振子进行能量补偿。
16、进一步地,将基座电极获取的电信号转化为振幅图像ⅰ,将通过图像获取装置获得的图像信号转化为振幅图像ⅱ,将每一帧的振幅图像ⅱ和振幅图像ⅰ转化为特征向量后进行相似度计算,当所述相似度超过预设阈值时,所述计算中心将此时的振幅值输入振幅能量计算模块,振幅能量计算模块根据振幅进行能量补偿计算,得到不同振幅下的能量补偿值,形成能量补偿方案。
17、所述相似度计算公式如下:
18、其中,x为特征向量1和特征向量2之间的匹配相关系数,系数越大表示相似性越大,a为模板中特征向量的坐标, 为两个特征向量之间的偏移量, 为特征向量1的相关系数, 为特征向量2的相关系数。
19、进一步地,所述振幅能量计算模块通过以下公式计算能量补偿值:
20、q=k(a0-a)+b
21、其中,q为能量补偿值,k为补偿系数,a为实际振幅,a0表示最大振幅,b为修正因子。
22、所述振幅变化规律为振幅随时间变化关系,所述能量补偿方案包括能量随时间变化关系,所述能量与所述振幅的衰减程度呈正相关。
23、与现有技术相比,本发明具有以下有益效果:
24、本发明通过图像识别技术采集谐振子的振幅变化情况,并与基座电极检测到的振幅电信号结合,通过图像处理相似度计算,综合电极和图像获取两方面判断振幅变化规律及趋势,并根据振幅变化规律和趋势提前进行能量补偿,提高了半球谐振陀螺的精度和稳定性,另外,图像识别和电极检测双路判断提高了振幅判断的可靠性。
技术特征:
1.一种半球谐振陀螺的半球谐振子振动幅值控制系统,包括振幅检测装置、计算中心、振幅控制装置,其特征在于,所述振幅检测装置检测到的振幅信号包括电信号和图像信号,所述计算中心可根据所述振幅检测装置检测到的振幅信号得到谐振子的振幅变化规律和趋势,并控制所述振幅控制装置进行能量补偿。
2.根据权利要求1所述的一种半球谐振陀螺的半球谐振子振动幅值控制系统,其特征在于,所述振幅检测装置包括:
3.根据权利要求2所述的一种半球谐振陀螺的半球谐振子振动幅值控制系统,其特征在于,所述计算中心同时根据所述基座电极和所述图像获取装置检测的振幅信息进行综合分析判断谐振子的振幅变化规律和变化趋势,得到能量与振幅的关系,生成能量补偿方案包括:将基座电极获取的电信号转化为振幅图像ⅰ,将通过图像获取装置获得的图像信号转化为振幅图像ⅱ,将每一帧的振幅图像ⅱ和振幅图像ⅰ转化为特征向量后进行相似度计算,当所述相似度超过预设阈值时,所述计算中心将此时的振幅值输入振幅能量计算模块,振幅能量计算模块根据振幅进行能量补偿计算,得到不同振幅下的能量补偿值,形成能量补偿方案。
4.根据权利要求3所述的一种半球谐振陀螺的半球谐振子振动幅值控制系统,其特征在于,所述相似度计算公式如下:
5.根据权利要求3所述的一种半球谐振陀螺的半球谐振子振动幅值控制系统,其特征在于,所述振幅能量计算模块通过以下公式计算能量补偿值:
6.根据权利要求5所述的一种半球谐振陀螺的半球谐振子振动幅值控制系统,其特征在于,所述谐振子上设有标记,用于在谐振子振动时辅助获取谐振子形变信息。
7.一种半球谐振陀螺的半球谐振子振动幅值控制方法,基于权利要求1至6任意一项所述的一种半球谐振陀螺的半球谐振子振动幅值控制系统,其特征在于,包括以下步骤:
8.根据权利要求7所述的一种半球谐振陀螺的半球谐振子振动幅值控制方法,其特征在于,将基座电极获取的电信号转化为振幅图像ⅰ,将通过图像获取装置获得的图像信号转化为振幅图像ⅱ,将每一帧的振幅图像ⅱ和振幅图像ⅰ转化为特征向量后进行相似度计算,当所述相似度超过预设阈值时,所述计算中心将此时的振幅值输入振幅能量计算模块,振幅能量计算模块根据振幅进行能量补偿计算,得到不同振幅下的能量补偿值,形成能量补偿方案。
9.根据权利要求8所述的一种半球谐振陀螺的半球谐振子振动幅值控制方法,其特征在于,所述相似度计算公式如下:
10.根据权利要求9述的一种半球谐振陀螺的半球谐振子振动幅值控制方法,其特征在于,所述振幅能量计算模块通过以下公式计算能量补偿值:
技术总结
本发明涉及陀螺仪技术领域,公开了一种半球谐振陀螺的半球谐振子振动幅值控制系统及方法,通过图像识别技术采集谐振子的振幅变化情况,并与基座电极检测到的振幅电信号结合,两方面判断振幅变化规律及趋势,并根据振幅变化规律和趋势提前进行能量补偿,提高了半球谐振陀螺的精度和稳定性,另外,图像识别和电极检测双路判断提高了振幅判断的可靠性。
技术研发人员:李永德
受保护的技术使用者:四川图林科技有限责任公司
技术研发日:
技术公布日:2024/2/29
- 还没有人留言评论。精彩留言会获得点赞!