一种障碍环境下无人艇多对一协同追捕控制器设计方法
本发明涉及船舶与海洋工程领域,并可在军事和民用领域广泛应用,主要研究模型未知和障碍环境下的多无人艇协同追捕问题,并提出了一种障碍环境下无人艇多对一协同追捕控制器设计方法。
背景技术:
1、近年来,随着无人艇在军事和民用领域的广泛应用,研究人员对其控制能力的提升和应用扩展提出了新的需求,如协同跟踪、拦截驱逐、目标包围等。这些需求的应用旨在有效地追捕目标对象,为军事行动、刑事侦查等领域提供更可靠的支持。其中,追捕控制是无人艇追逃应用中的关键技术之一,其涉及到对逃逸者的准确跟踪和多艇协同控制等任务。
2、在过去的几年中,一些研究者针对追捕问题进行了深入的研究,然而目前的追捕研究大多是基于一阶系统设计,只考虑被控目标的运动学而忽略了动力学。随着无人艇在海洋领域中应用的不断扩大,多无人艇追捕技术成为研究的一个重要方向。在多无人艇协同追捕过程中,具有避碰能力的协同追捕控制策略既要考虑个体之间的碰撞,还要考虑环境中的障碍物,因此,多艇协同追捕中的避碰问题是一个具有挑战性的难题;同时,在实际航行环境中,由于通信距离和带宽的限制,对逃逸者信息的获取也是一个困扰研究者的问题,因为逃逸者可能采取隐匿、变速、变向等策略,导致其轨迹预测和追踪变得更加困难;此外,由于系统模型的不确定性以及海洋环境的复杂性和随机性,无人艇在追捕过程中还要面临着系统动态未知以及风浪流等复杂扰动因素的影响,这进一步增加了追捕逃逸无人艇的难度。因此,在复杂的海洋环境中实现安全、快速的追捕控制仍然是一个值得研究的问题。
3、综上所述,现有技术存在以下不足:
4、第一,现有的协同追捕策略大多是基于一阶系统设计,只考虑被控目标的运动学而忽略了动力学,这可能导致在某些情况下追捕控制的稳定性无法保证。此外,大多数现有的协同追捕策略假设逃逸无人艇信息是全局已知的,然而在广阔的海域上,实现逃逸无人艇信息的全局已知往往是困难的。
5、第二,现有的协同追捕策略通常只关注追捕逃逸无人艇的可行性,而忽略了追踪无人艇在追捕过程中面临的静态障碍物和动态障碍物,以及邻居追踪无人艇的碰撞风险,这可能导致在追捕过程中多无人艇系统的安全性无法得到保障。
6、第三,现有的基于具体模型的控制器设计需要依赖模型动力学参数知识,这种依赖预设参数的方式可能会对控制器的设计和调整带来一定的局限性,使得控制器难以适应不同的场景和任务需求。
技术实现思路
1、为了解决上述问题,本发明采用的技术方案是:一种障碍环境下无人艇多对一协同追捕控制器设计方法,包括以下步骤:
2、考虑未知系统动态和复杂环境扰动,构建追踪无人艇的运动学方程;
3、基于逃逸无人艇位置的位置,实现多个虚拟追踪者对逃逸无人艇位置和速度的估计;
4、基于包围算法、接近算法与权衡算法,设计多个虚拟追踪者对逃逸无人艇分布式协同追捕策略;
5、基于分布式协同追捕策略,得到虚拟追踪者的追捕速度;
6、构建控制障碍函数,生成最优轨迹生成器,避免协同追捕过程中的避碰;
7、定义纵向轨迹跟踪误差和横向轨迹跟踪误差,设计视距制导律;
8、基于视距制导律,无人艇系统给定的速度信号,设计扩张状态观测器;
9、基于视距制导律、扩张状态观测器设计无模型控制律,实现多个无人艇对一个逃逸无人艇的追捕控制。
10、进一步地:所述基于逃逸无人艇位置的位置,实现多个虚拟追踪者对逃逸无人艇位置和速度的估计采用分布式目标观测器,所述分布式目标观测器设计如下:
11、
12、其中,表示第i艘虚拟追踪者对逃逸无人艇位置pe的估计;表示第i艘虚拟追踪者对逃逸无人艇位置pe估计值的导数;表示第j艘虚拟追踪者对逃逸无人艇位置pe的估计;表示第i艘虚拟追踪者对逃逸无人艇速度ue的估计;表示第i艘虚拟追踪者对逃逸无人艇速度ue估计的导数;k1为正定系数矩阵;k2为正定系数矩阵;c为正常数;aij为多个虚拟追踪者协同的通信拓扑结构参数;bi为虚拟追踪者与逃逸无人艇的探测结构参数。
13、进一步地:所述基于包围算法、接近算法与权衡算法,设计多个虚拟追踪者对逃逸无人艇分布式协同追捕策略的过程如下:
14、定义第i艘追踪无人艇的虚拟追踪信号为:
15、且
16、其中,表示第i艘虚拟追踪者的位置;表示第i艘虚拟追踪者的速度;表示第i艘虚拟追踪者的最大速度值;
17、基于分布式目标观测器估计的逃逸无人艇状态信息,定义了第i艘虚拟追踪者与逃逸无人艇之间的相对距离ρi和相对角度βi:
18、
19、在追捕策略中引入了阿波罗圆方法,占据角θi定义为切线l1和切线l2之间的角度,用sin规则表示如下:
20、θi=2arcsin(μi) (7)
21、虚拟追踪者群体逆时针分散,第i艘虚拟追踪者与相邻第(i+1)艘虚拟追踪者的覆盖角αi定义为:
22、
23、其中,β(m+)=β1;θ(m+)=θ1;当i=m时,ζi=2π;当i≠m时,ζi=0;αi<0表示第i艘虚拟追踪者和第(i+1)艘虚拟追踪者都追踪到逃逸无人艇;否则,逃逸无人艇就可以逃脱;
24、所有虚拟追踪者的占据角度表示为:
25、
26、其中,θg为包围任务的总占据角。
27、所提出的分布式协作追捕策略包括包围任务和接近任务,包围任务是增加总占据角θg,包围策略设计为:
28、λis=kiρi(αi-α(i-)) (10)
29、其中,当i=0时,α0=αm;ki>0为包围参数;(αi-α(i-1))>0表示第i艘虚拟追踪者逆时针包围逃逸无人艇;接近任务是缩短与逃逸无人艇的距离,接近策略设计为
30、λih=-hiρi (11)
31、其中,hi>0为接近参数。
32、采用权衡方法确定包围策略和接近策略的权重,设计权衡系数,假设所有虚拟追踪者以最大速度移动;
33、由式(9)可知和其中ηi∈[0,π/2]是一个权衡参数,其具体形式如下:
34、
35、其中,κi∈[0,1];κi=2|αi-α(i-)|/4π-θ(i+)+θ(i-)为包围权重;ιi∈[0,1],为接近权重,且ρi+ρ(i-)+ρ(i+)≠0。
36、进一步地:所述构建控制障碍函数,生成最优轨迹生成器的过程如下:
37、对于静态障碍物,考虑安全集设计控制障碍函数为构造控制障碍函数安全约束条件为其中,且是正参数;
38、对于动态障碍物,考虑安全集设计控制障碍函数为构造控制障碍函数安全约束条件为其中,且是正参数;
39、对于邻居虚拟追踪者,考虑安全集设计控制障碍函数为构造控制障碍函数安全约束条件为其中,且是正参数;
40、基于控制障碍函数的最优轨迹生成器设计如下:
41、
42、s.t.
43、
44、
45、其中,
46、进一步地:所述定义纵向轨迹跟踪误差和横向轨迹跟踪误差,设计视距制导律的过程如下:
47、定义纵向轨迹跟踪误差xiz和横向轨迹跟踪误差yiz如下:
48、
49、其中,是切线角,即规划轨迹的速度方向。
50、所述视距制导律设计如下:
51、
52、其中,为轨迹生成器的速度;为前视距离;和是正参数。
53、进一步地:所述扩张状态观测器设计如下:
54、
55、其中,均为观测器的扩张状态;为ui的估计值;为ri的估计值;为σiu的估计值;为σir的估计值;为ui估计值的导数;为ri估计值的导数;为σiu估计值的导数;为σir估计值的导数;均为设计的观测器增益系数。
56、进一步地:所述无模型控制律设计如下:
57、
58、其中,γiu和γir为控制参数;kiu和kir是调节参数。
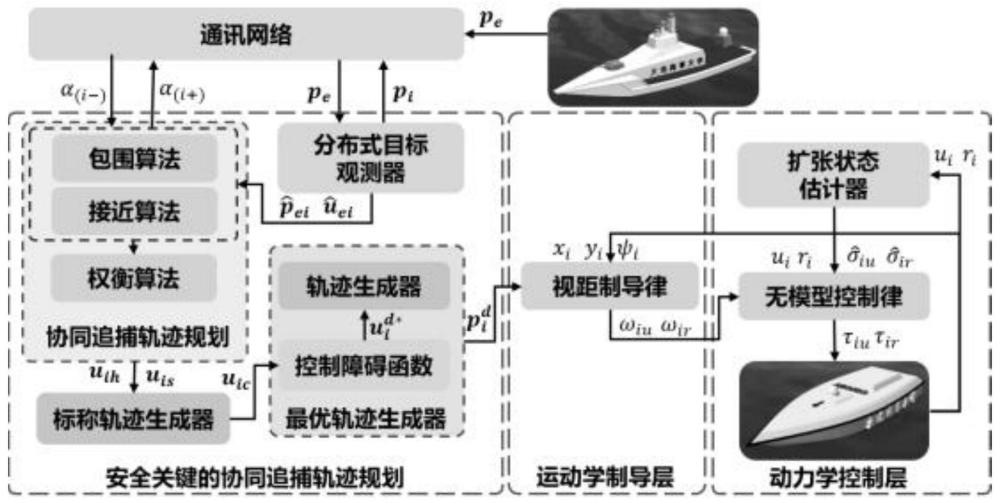
59、一种障碍环境下无人艇协同追捕控制器,包括分布式目标观测器、协同追捕轨迹规划、标称轨迹生成器、基于控制障碍函数的最优轨迹生成器、视距制导律模块、扩张状态观测器与无模型控制律;
60、所述分布式目标观测器的输入端与通讯网络给定的逃逸无人艇的位置信号相连接,所述分布式目标观测器输出端与协同追捕轨迹规划相连接;
61、所述协同追捕轨迹规划的输入端与通讯网络给定的第i艘虚拟追踪者、相邻第i+1艘虚拟追踪者的覆盖角信号、分布式目标观测器相连,所述协同追捕轨迹规划输出端与标称轨迹生成器相连接;
62、所述标称轨迹生成器的输入端与协同追捕轨迹规划相连接,所述标称轨迹生成器输出端与基于控制障碍函数的轨迹生成器相连接;
63、所述基于控制障碍函数的最优轨迹生成器的输入端与标称轨迹生成器相连,所述基于控制障碍函数的最优轨迹生成器输出端与视距制导律模块相连接;
64、所述视距制导律模块的输入端与基于控制障碍函数的最优轨迹生成器、无人艇系统给定的状态信号相连,所述视距制导律模块的输出端与无模型控制律相连接;
65、所述扩张状态观测器的输入端与无人艇系统给定的速度信号相连接,所述扩张状态观测器的输出端与无模型控制律相连接;
66、所述无模型控制律的输入端与扩张状态观测器、视距制导律相连接,所述无模型控制律的输出端与无人艇系统相连接。
67、本发明提供的一种障碍环境下无人艇多对一协同追捕控制器设计方法,本发明研究了含有未知系统动态、复杂环境扰动和逃逸无人艇信息不确定的多无人艇协同追捕问题,提出一种基于控制障碍函数的分布式协同追捕控制方法,解决在复杂的海洋环境中,追踪无人艇之间有效避碰并协同追捕逃逸无人艇的问题。
68、与现有技术相比,本发明具有以下有益效果:
69、第一,与现有的针对一阶积分器的协同追捕策略相比,我们提出的方法不仅综合考虑了无人艇的动力学和运动学特性,还考虑了逃逸无人艇信息局部已知的情况。通过利用已知的局部信息,能够更有效地确定追捕的方向和路径,从而提高了协同追捕任务的追捕速度和追捕效果。
70、第二,与现有未考虑避碰问题的协同追捕策略相比,提出的方法通过设计不同的控制障碍函数,能够避免与环境中静态障碍物,动态障碍物,以及相邻追踪者的碰撞,提高了协同追捕任务的安全性。
71、第三,与现有的基于具体模型的控制器相比,提出的方法设计了一种无模型控制律,无需任何先验模型参数,可以更好地适应不同环境和船舶特性的变化,提高了协同追捕任务的鲁棒性。
72、通过以上步骤的设计,建立了一个完整的多追踪无人艇-单逃逸无人艇追捕系统,并在复杂的环境中进行有效的追捕任务。
- 还没有人留言评论。精彩留言会获得点赞!