一种收割机的行走控制方法、系统、设备、介质及收割机与流程
本发明涉及农用机械,具体而言,本发明涉及一种收割机的行走控制方法、系统、设备、介质及收割机。
背景技术:
1、随着农业机械化的不断发展,静液压驱动技术在农业机械领域应用越来越广泛,农业生产效率也越来越高。目前市场上的谷物联合收割机采用的静液压驱动技术大多使用“变量泵+定量马达”的方式。这种方式行走马达的排量无法自动进行调整,完全依赖驾驶员的手动操控,燃油经济性较低,同时车辆在行走过程中,为了保证车辆足够的驱动能力,往往需要提高系统压力,这样还会影响液压系统使用寿命。
技术实现思路
1、本发明所要解决的技术问题是提供了一种收割机的行走控制方法、系统、设备、介质及收割机,旨在解决上述至少一个技术问题。
2、第一方面,本发明解决上述技术问题的技术方案如下:一种收割机的行走控制方法,该方法包括:
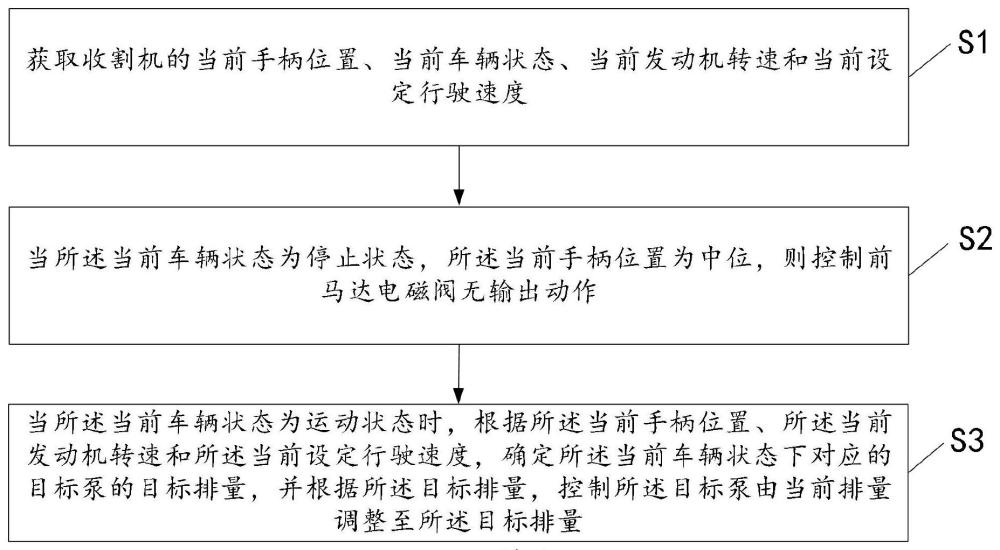
3、获取收割机的当前手柄位置、当前车辆状态、当前发动机转速和当前设定行驶速度,所述当前车辆状态为停止状态或运动状态,所述运动状态为前进加速状态、后退加速状态、前进减速状态或后退减速状态中的任一种;
4、当所述当前车辆状态为停止状态,所述当前手柄位置为中位,则控制前马达电磁阀无输出动作;
5、当所述当前车辆状态为运动状态时,根据所述当前手柄位置、所述当前发动机转速和所述当前设定行驶速度,确定所述当前车辆状态下对应的目标泵的目标排量,并根据所述目标排量,控制所述目标泵由当前排量调整至所述目标排量。
6、本发明的有益效果是:可在收割机处于不同的车辆状态时,可根据当前手柄位置、当前发动机转速和当前设定行驶速度,自动调整目标泵的当前排量,相较于手动调整,大大降低了驾驶员的劳动强度,同时也提高了联合收割机的作业效率和燃油经济性。
7、在上述技术方案的基础上,本发明还可以做如下改进。
8、进一步,上述根据所述目标排量,控制所述目标泵由当前排量调整至所述目标排量,包括:
9、根据所述目标排量,确定所述目标泵对应的目标电磁阀电流;
10、控制所述目标泵对应的电磁阀按照设定斜坡率,由当前电磁阀电流调整至所述目标电磁阀电流,以使所述目标泵由当前排量调整至所述目标排量。
11、采用上述进一步方案的有益效果是,由于目标泵的当前排量直接调整到目标排量,会造成驾驶感不舒适,因此,本方案基于设定斜坡率,将当前电磁阀电流调整至所述目标电磁阀电流,可提升驾驶舒适度。
12、进一步,上述目标泵为前进泵或后退泵,所述前进泵对应的电磁阀为前进泵电磁阀,所述后退泵对应的电磁阀为后退泵电磁阀;
13、当所述当前车辆状态为前进加速状态时,所述当前车辆状态下对应的目标泵为前进泵;
14、当所述当前车辆状态为后退加速状态时,所述当前车辆状态下对应的目标泵为后退泵;
15、当所述当前车辆状态为前进减速状态时,所述当前车辆状态下对应的目标泵为前进泵;
16、当所述当前车辆状态为后退减速状态时,所述当前车辆状态下对应的目标泵为后退泵。
17、采用上述进一步方案的有益效果是,基于不同的车辆状态,对应调整不同的目标泵,可实现对收割机的目标泵的排量的准确调整。
18、进一步,上述收割机包括前马达和轮边马达,所述轮边马达包括左轮边马达和右轮边马达,所述前马达安装在所述收割机的车桥变速箱上,所述轮边马达与行走泵之间通过控制阀组连接;所述方法还包括:
19、在所述收割机处于四驱状态时,获取所述左轮边马达的第一转速、所述右轮边马达的第二转速和所述前马达的第三转速;
20、根据所述第一转速、所述第二转速和所述第三转速,确定所述收割机的打滑状态;
21、根据所述打滑状态,控制所述前马达的排量或接通强制分流电磁阀。
22、采用上述进一步方案的有益效果是,在所述收割机处于四驱状态时,基于左轮边马达的第一转速、右轮边马达的第二转速和前马达的第三转速,可以准确的确定出收割机的打滑状态,以根据打滑状态及时控制前马达的排量,进而可有效应对恶劣湿滑的工况条件,使收割机的脱困能力更强。
23、进一步,上述四驱状态为四驱高速状态或四驱低速状态中的任一种,所述四驱高速状态对应的驱动力大于所述四驱低速状态对应的驱动力;该方法还包括:
24、当所述收割机处于四驱高速状态时,接通所述收割机的后马达排量切换电磁阀;
25、当所述收割机处于四驱低速状态时,断开所述后马达排量切换电磁阀。
26、采用上述进一步方案的有益效果是,对于不同的四驱状态,采用不同的控制策略进行自动控制,可保证收割机驾驶的安全性。
27、进一步,所述收割机的驾驶座椅上安装有座椅压力开关;该方法还包括:
28、获取所述座椅压力开关检测到的座椅压力信号;
29、根据所述座椅压力信号,判断驾驶员是否在所述驾驶座椅上;
30、若所述驾驶员不在所述驾驶座椅上,则控制所述收割机停车;
31、若所述驾驶员在所述驾驶座椅上,且所述当前手柄位置为不处于中位,则生成提醒信息,以告知驾驶员将手柄移动至中位后,开始控制收割机行走。
32、采用上述进一步方案的有益效果是,基于座椅压力开关的设置,可实时监测驾驶员在位状态,同时基于不同的在位状态,可采用不同的处理策略,增加了驾驶员离开座椅保护策略,提高了安全性。
33、第二方面,本发明为了解决上述技术问题还提供了一种收割机的行走控制系统,该系统包括车载控制单元,以及分别与所述车载控制单元通信连接的前马达电磁阀、发动机处理器、智能显示终端和多功能扶手箱;
34、所述多功能扶手箱,用于获取收割机的当前手柄位置;
35、所述智能显示终端,用于获取当前设定行驶速度;
36、所述发动机处理器,用于控制所述收割机的发送机转速,以获取当前发动机转速;
37、所述车载控制单元,用于获取当前车辆状态,所述当前车辆状态为停止状态或运动状态,所述运动状态为前进加速状态、后退加速状态、前进减速状态或后退减速状态中的任一种:
38、所述车载控制单元,还用于:
39、当所述当前车辆状态为停止状态,所述当前手柄位置为中位,则控制前马达电磁阀无输出动作;
40、当所述当前车辆状态为运动状态时,根据所述当前手柄位置、所述当前发动机转速和所述当前设定行驶速度,确定所述当前车辆状态下对应的目标泵的目标排量,并根据所述目标排量,控制所述目标泵由当前排量调整至所述目标排量。
41、第三方面,本发明为了解决上述技术问题还提供了一种电子设备,该电子设备包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,处理器执行该计算机程序时实现本技术的收割机的行走控制方法。
42、第四方面,本发明为了解决上述技术问题还提供了一种计算机可读存储介质,该计算机可读存储介质上存储有计算机程序,该计算机程序被处理器执行时实现本技术的收割机的行走控制方法。
43、第五方面,本发明为了解决上述技术问题还提供了一种收割机,该收割机包括第三方面所描述的电子设备。
44、本技术附加的方面和优点将在下面的描述中部分给出,这些将从下面的描述中变得明显,或通过本技术的实践了解到。
- 还没有人留言评论。精彩留言会获得点赞!