一种无人机的数据采集系统及其使用方法
本发明涉及数据采集,具体为一种无人机的数据采集系统及其使用方法。
背景技术:
1、无人驾驶飞机简称“无人机”,是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机,或者由车载计算机完全地或间歇地自主地操作,随着科技的快速发展,无人机的应用范围也逐渐增加,人们通过无人机去解决一些很难完成的事,但是,在无人机使用时,时常也会出现异常,在申请号为201821019237.4的中国专利公开了“一种基于无人机性能监测的数据采集系统及无人飞行器,包括地面站、地面数传模块和安装于无人机上的数据采集模块、主控模块、机载数传模块,数据采集模块与主控模块连接,主控模块通过无线连接的机载数传模块、地面数传模块与地面站通信;主控模块将数据采集模块所获取的无人机震动数据、温度数据、动力数据、电源数据以及位置数据分别处理后传送至地面站,以供地面站根据无人机性能分析方法对所获取的采集数据进行分析以判定无人机性能。本实用新型所提供的数据采集系统可以独立于飞行控制系统,不仅能够扩展数据采集模块的类型和数量,测量更加准确,采集的数据较为广泛,性能判定更加合理且可靠”;
2、该技术方案仅仅解决了对无人机自身飞行数据采集的问题,但是目前随着无人机技术的发展,无人机的飞行高度、距离及速度都有了极大的进步,因此当无人机操控人员在地面对无人机进行控制时,若操作不当,容易使无人机超出控制距离,导致无人机无法返回,造成无人机难以寻回,而且当无人机在飞行过程中出现故障,导致操控人员无法对无人机进行控制时,容易使无人机失控甚至坠毁。
技术实现思路
1、本发明的目的在于提供一种无人机的数据采集系统及其使用方法,以解决上述背景技术中提出的问题。
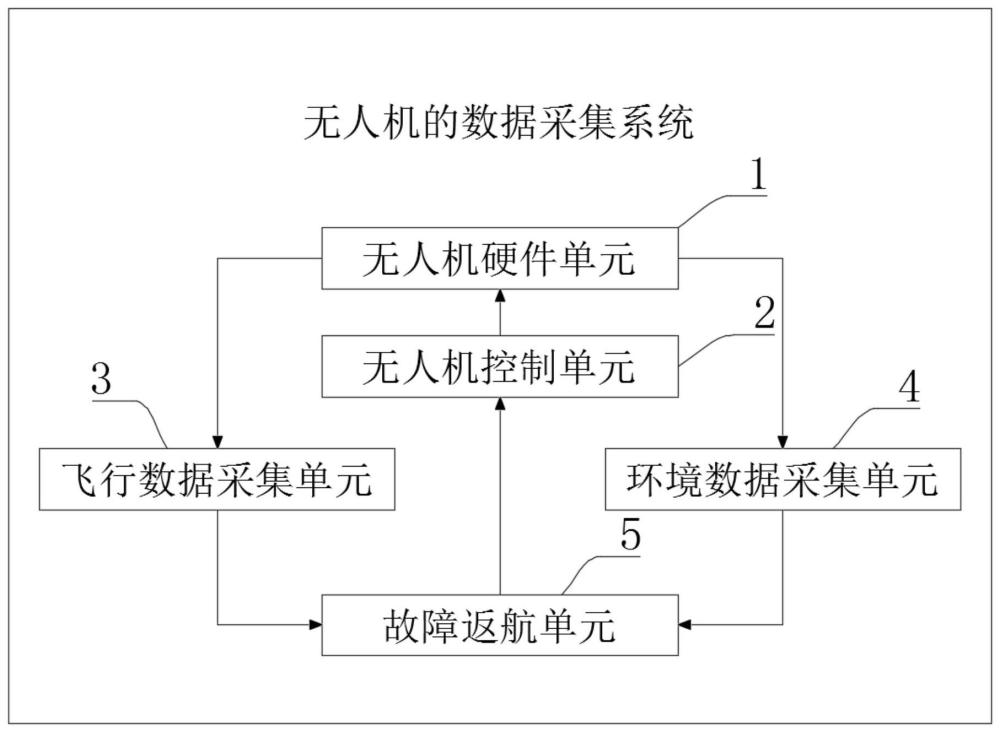
2、为实现上述目的,本发明提供如下技术方案:一种无人机的数据采集系统及其使用方法,包括无人机硬件单元、无人机控制单元、飞行数据采集单元、地理数据采集单元和故障返航单元;
3、无人机硬件单元,所述无人机硬件单元接收硬件控制数据,通过控制无人机硬件,以采集无人机自身的飞行数据与飞行环境的数据,所述无人机硬件单元对采集到的数据进行传输;
4、无人机控制单元,所述无人机控制单元根据无人机飞行过程中的各项数据,对无人机的飞行进行控制,并将数据传输至无人机硬件单元中,以对无人机硬件单元中的硬件进行控制;
5、飞行数据采集单元,所述飞行数据采集单元接收无人机硬件单元中采集到的无人机自身飞行数据,并对采集到的数据进行处理,所述飞行数据采集单元将经过处理的数据进行传输;
6、地理数据采集单元,所述地理数据采集单元接收无人机硬件单元中采集到的环境数据,并对环境数据进行加工处理,所述地理数据采集单元将经过处理的数据进行传输;
7、故障返航单元,所述故障返航单元根据飞行数据采集单元和地理数据采集单元中的数据判断无人机是否返航,所述飞行数据采集单元将返航数据传输至无人机控制单元中。
8、优选的,所述无人机硬件单元包括电源模块、输入输出接口和主控模块,所述电源模块由三路电源管理芯片构成,可对usb、pm和电调三路电源进行输入管理,在稳定输出5v电源的同时可以让三路电源为电路板进行不间断的供电,所述输入输出接口采用串口、spi、i2c、adc、can、io和usb输入输出口,用于与外部硬件进行通信,所述主控模块由两块stm芯片组成,分为主处理器与协处理器,通过主处理器对无人机采集到的数据进行处理,并且控制无人机的飞行,当主处理器宕机时,通过协处理器保证无人机安全。
9、优选的,所述无人机硬件单元包括储存模块和传感器模块,所述储存模块包括存储器和移动存储卡组成,通过储存模块使无人机在断电后,仍可保存飞行数据以及采集到的各项数据,当无人机在飞行过程中出现重启时,通过储存模块使无人机仍保持之前的飞行状态,所述传感器模块采用多个监测飞行器,其中包括应变片,通过将应变片粘贴在无人机的表面,当无人机表面的应变片中的电阻丝沿着轴向方向产生形变时,其电阻值也发生变化,以此检测无人机机翼的形变,通过金属丝电阻相对变化与应变计算算法计算电阻丝的电阻相对改变值,所述传感器模块还包括倾角传感器,通过倾角传感器测量飞机相对于地轴的姿态角,所述传感器模块还包括加速度传感器,通过加速度传感器测量无人机的加速度;
10、金属丝电阻相对变化与应变计算算法如下:
11、
12、式中,r表示电阻丝的固有阻值,dr/r表示电阻丝的电阻相对变化值,ρ表示1m3的电阻,dρ表示1m3的电阻丝相对改变值,μ表示电阻丝弹性常量,l表示电阻丝长度,dl/l表示电阻丝长度相对改变值。
13、优选的,所述无人机控制单元包括姿态解算模块和运行控制模块,所述姿态解算模块采用卡尔曼滤波算法来对传感器数据进行滤波与融合,拉尔曼滤波包括状态矩阵与测量矩阵,其中状态矩阵包括三轴角速度、三轴加速度、加速度在无人机坐标系的三轴分量和磁力计在无人机坐标系的三轴分量四部分,其中测量矩阵包括加速度、陀螺仪和磁力计得到的三轴数据,通过卡尔曼滤波后的计算结果得到无人机的姿态解算数据,所述运行控制模块接收姿态解算模块通过串级pid构成,包括角度环、速度环和加速度环,其中通过遥控、gps和气压计计算得到目标角度,通过姿态解算模块得到姿态解算数据包括真实角度、真实速度和真实加速度,通过运行控制模块得到电机控制值。
14、优选的,所述无人机控制单元包括模式调节模块和电机控制模块,所述模式调节模块包括设定手动飞行模式、巡航模式和gps定位模式,通过模式调节模块进行飞行模式设定与检测,通过模式调节模块检测无人机所处飞行模式,当无人机进行手动飞行时,通过计算目标角度得到遥控设备的输出值,使得通过遥控设备可实现对无人机的精准控制,当无人机进行巡航飞行时,根据气压计的数据进行解算,使得无人机保持设定高度飞行,当无人机进行gps定位飞行时,通过gps数据进行飞行解算,所述电机控制模块通过运行控制模块的电机控制值,对无人机的驱动电机进行控制,使得无人机的姿态得以控制。
15、优选的,所述飞行数据采集单元包括机载数据采集模块和地面数据采集模块,所述机载数据采集模块通过将数据采集卡与传感器和主控芯片连接,用以接收传感器采集的数据,并将采集到的数据进行模拟或数字信号转换,然后通过数据发射电台将传感器数据和无人机飞行数据发送至地面端,所述地面数据采集模块通过地面接收电台接收机载数据采集模块所传输的数据,然后传输至地面端的计算机中,通过地面数据采集模块将地面处理结果再传输至无人机。
16、优选的,所述飞行数据采集单元包括数据处理模块,所述数据处理模块对地面数据采集模块中计算机所接收的数据进行处理,首先进行数据集创建,根据无人机不同的飞行动作用不同速度进行数据集创建,然后对数据集进行预处理,根据神经网络需要和数据本身特征对数据进行处理,包括对数据进行归一化,通过批标准化算法进行数据归一化,然后根据无人机飞行姿态将数据分为正常姿态数据与故障姿态数据后构建神经网络模型的训练集;
17、批标准化算法如下:
18、
19、其中,表示归一化结果,μb表示平均值,表示方差,ε表示不为零的自然数。
20、优选的,所述地理数据采集单元包括图像采集模块、图像处理模块和机器学习模块,所述图像采集模块通过摄像头采集地面地形,包括起飞点图像、道路图像、河流图像及各种地理图像,所述图像处理模块对采集到的图像进行处理,通过滤波算法对图像进行滤波处理,再通过明暗恢复形状技术对经过处理后得到的高质量图像进行地形地貌碰撞模型建立,所述机器学习模块通过对无人机的每次起飞与降落位置的地形地貌进行学习并存储,并判断飞行途中所采集到的地形图像与起飞或降落位置地形的相似度;
21、滤波算法如下:
22、
23、
24、在上式中,μ是像素的局部矩阵均值,σ2表示方差,d是图像中每个像素的m×n邻域,i(i,j)表示像素点位置,利用wiener滤波算法估计其灰度值:
25、
26、ν2是整幅图像的方差,根据图像的局部方差来调整滤波输出,当局部方差小时,滤波效果强。
27、优选的,所述故障返航单元包括故障判断模块和返航模块,所述故障判断模块对数据处理模块中所采集到的飞行数据进行故障判断,并且根据模式调节模块中的飞行模式对无人机与地面遥控设备的连接进行判断,所述返航模块根据故障判断模块中的判断结果,进行返航设定,根据机器学习模块对返航位置进行设定。
28、一种无人机的数据采集系统的使用方法,其适用于任意一项所述的一种无人机的数据采集系统,包括以下步骤:
29、s1、首先通过机器学习模块设定飞行模式,然后起飞无人机,通过传感器模块对无人机飞行数据进行采集,然后在传感器模块与主控模块之间设置数据采集卡,使传感器数据通过数据采集卡进行模拟或数字信号转换后,传输至主控模块中,再由输入输出接口传输至图像采集模块中的数据发射电台中,通过地面数据采集模块接收无人机飞行数据后,通过数据处理模块对数据进行处理,然后再通过地面数据采集模块将处理结果返回至无人机;
30、s2、通过图像采集模块采集无人机的起飞位置与降落位置的地形以及飞行过程中的地形地貌图像,再通过图像处理模块进行图像处理,通过机器学习模块进行机器学习,使得无人机可寻找起飞位置进行返航降落,在无人机飞行时,通过故障判断模块进行故障判断,包括飞行姿态异常、手动飞行模式下遥控连接中断,然后通过返航模块进行返航设定,并控制无人机返回至机器学习模块寻得的起飞位置。
31、与现有技术相比,本发明的有益效果是:
32、本发明通过对无人机的机载飞行数据以及飞行过程中的地理数据进行采集,通过对所采集的机载数据进行处理,及时判断无人机飞行是否发生故障,避免了当无人机操控人员在地面对无人机进行不当操作时导致无人机超出控制距离且无法返回的情况发生,避免了无人机的损失,通过进行神经网络学习,对正常飞行数据与异常飞行数据进行采集分类,提高了无人机的飞航安全,通过对所采集到的地理图像进行机器学习,提高无人机返航落点的准确性与适宜性。
- 还没有人留言评论。精彩留言会获得点赞!