基于事件触发的无人车自适应神经网络跟踪控制方法
本发明属于无人车跟踪控制领域,涉及一种基于事件触发的无人车自适应神经网络跟踪控制方法。
背景技术:
1、网络带宽资源有限,存在不必要的信号传输,以及控制信号的延迟。
技术实现思路
1、有鉴于此,本发明的目的在于提供一种基于事件触发的无人车自适应神经网络跟踪控制方法。
2、为达到上述目的,本发明提供如下技术方案:
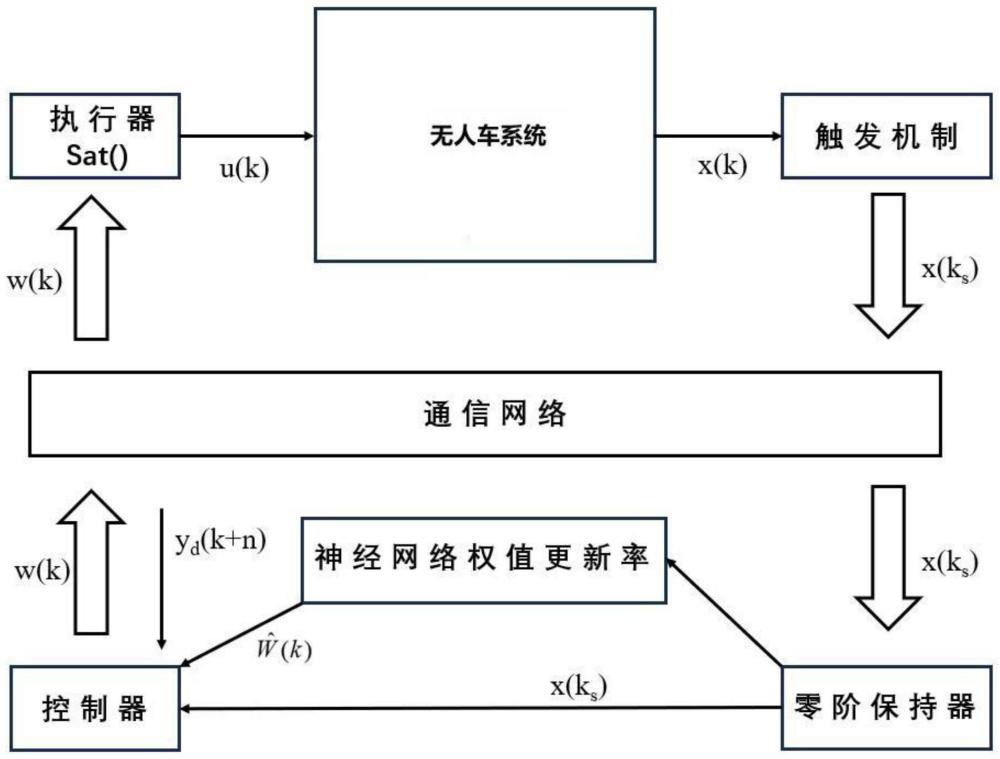
3、基于事件触发的无人车自适应神经网络跟踪控制方法,该方法包括以下步骤:
4、步骤1:建立无人车系统的纵向动力学模型,具体包括:建立无人车纵向非线性动力学模型;
5、步骤2:为便于数字控制器设计,采用欧拉离散化方法对纵向动力学进行离散化处理,得到离散时间下的无人车纵向动力学模型,并建立期望跟踪轨迹;
6、步骤3:设计新的光滑非线性函数来处理系统的输入饱和问题对执行器带来的不利影响;
7、步骤4:设计高阶神经网络用作函数逼近器来处理系统动力学模型中的未知非线性项;
8、步骤5:设计系统的跟踪误差和网络通道间的信号传输误差;
9、步骤6:设计作用于传感器和控制器之间网络通道的事件触发机制;具体包括:通过设计事件触发条件来确定事件触发序列,从而保证在事件触发控制律的作用下,闭环系统中的状态是最终一致有界的、输出跟踪误差最终收敛到零点的小邻域内;
10、步骤7:设计基于事件触发的自适应神经网络控制器,具体包括:在控制器与执行器之间的网络通道中引入事件触发机制,通过反推设计方法和李雅普诺夫稳定性理论构造基于事件触发的自适应神经网络控制器。
11、进一步的,所述步骤1中,建立无人车系统纵向动力学模型为:
12、
13、
14、其中,其中p(t),v(t)分别表示时刻t时,无人车的位置和速度,f(p(t))是由于参数不确定和建模误差造成的未知非线性项,且m表示无人车的质量,ρ,cd,a分别表示空气密度、车辆阻力系数和车辆横截面积,采用神经网络对空气密度、车辆阻力系数和车辆横截面积进行近似;d(t)是未知的外部扰动,满足g,f分别表示重力加速度和道路滚动阻力系数;u(t)是执行器输出且存在饱和非线性,w(t)∈r表示系统的控制输入;u+>0,u-<0是已知的常数;假设系统的全部状态是可测的。
15、进一步的,所述步骤2中,令ts表示采样周期,采用欧拉离散化方法对纵向动力学进行离散化处理为:
16、
17、令p(k)=x1(k),v(k)=x2(k),则车辆纵向动力学模型重写为:
18、
19、
20、其中,ts表示采样时间,f(p(k))、f(v(k))是未知的非线性光滑函数,y(k)是系统的输出,d(k)是未知的外部扰动,d(k)≤|d|,d是一个正常数;u+>0,u-<0,w(k)是系统的控制输入,u(k)是执行器输出,k为时刻。
21、进一步的,所述步骤2中,设计新的光滑非线性函数来处理系统的输入饱和问题对执行器带来的不利影响为:
22、
23、其中,tanh(·)表示双曲正切函数,a=(u+-u-)/2,b=(u++u-)/2,c=-a*atanh(-b/a),atanh(·)表示反双曲正切函数,u+>0,u-<0为待设计的饱和界,w(k)∈r表示系统的控制输入。
24、进一步的,所述步骤3中,设计高阶神经网络用作函数逼近器来处理系统数学模型中的未知非线性项被设计为:
25、y(w,x)=wts(x)
26、其中:x∈rn,y(w,x)分别代表神经网络的输入和输出,w=[w1,w2,...,wl]t∈rl是隐藏神经元到输出层的隐藏权值,s(x)表示激活函数;其向量元素为s(xi)=tanh(xi);
27、如果高阶神经网络的神经元足够多,那么它能够以任意精度逼近任意的光滑函数;即对于任意光滑函数f(x):rn→r,至少存在一组理想的权值w*和一个任意小的正常数ε*使得如下的不等式成立;
28、|f(x)-w*ts(x)|≤ε*。
29、进一步的,所述步骤4中,分别定义系统的跟踪误差和位于传感器和控制器之间网络通道的信号传输误差为:
30、z1(k)=x1(k)-yd(k)
31、z2(k)=x2(k)-α1(k)
32、et(k)=x(ks)-x(k),ks≤k<ks+1
33、其中,x1(k)为系统的实际输出,yd(k)是期望的系统输出,α1(k)是后面待设计的虚拟控制律;ks表示上一个事件触发时刻,ks+1是下一个事件触发时刻,x(k)是当前时刻的系统状态,x(ks)是上一次传输的系统状态。
34、进一步的,所述步骤5中,设计控制方案中的事件触发条件为:
35、首先,定义系统的事件触发状态指标函数τ(k)为:
36、
37、设计网络通道传输信号的触发条件为:
38、
39、其中,gn,rn,n=1,2是待设计的正常数,z1(k)是系统的跟踪误差,ls是lipschitz常数,是后面要设计的神经网络权值,d(·)表示死区算子,定义为:
40、
41、bz为跟踪误差的期望界;
42、事件触发条件表示为:
43、
44、在(ks,ks+1)时间区间内,当触发条件满足时,x(ks)会更新为触发时刻x(ks+1)的值,否则x(ks)会受零阶保持器的作用始终保持为上一个事件触发时刻的值。
45、进一步的,所述步骤6中,所述基于事件触发的自适应神经网络控制器的设计描述为:
46、首先定义如下坐标变换:
47、
48、再定义中间函数:
49、
50、其中,α1(k)是待设计的虚拟控制律;定义上述坐标变换后,基于反步法进行系统控制律的设计;将步骤5中的事件触发机制引入自适应神经网络控制器与执行器之间的网络通道,由系统的动力学模型,得其差分动态方程:
51、
52、将虚拟控制律α1(k)设计为:
53、
54、将虚拟控制律α1(k)带入系统数学模型的差分动态方程,有:
55、z1(k+1)=tsz2(k)
56、同理得误差变量z2(k)的动态差分方程为:
57、
58、易知上式中的α1(k+1)包含将来状态x1(k+1),为避免出现在控制器设计中出现非因果问题,采用变量替换的方法,借助之前定义的中间函数,将系统的将来状态x1(k+1)表示成关于系统当前状态变量的函数,即:
59、
60、定义如下非线性函数:
61、
62、采用高阶神经网络来逼近φ2(x(k),yd(k+2)),根据步骤3中提到的神经网络的万能逼近性,存在一组理想权值w*使得以下等式成立:
63、φ2(x(k),yd(k+2))=w*ts(χ(k))+ε(k)
64、其中,χ=[x(k),yd(k+2)]t是神经网络的输入向量,ε(k)是神经网络的逼近误差;考虑到执行器的输入饱和非线性特性以及传感器到控制器网络资源的有限性,设计如下的事件触发控制律:
65、
66、在该控制律中,神经网络的输入向量为:χ(ks)=[x(ks),yd(k+2)]t,根据步骤1中饱和函数的定义知,u(k),v(k),w(k)之间存在如下的关系:
67、u(k)=sat(w(k))=w(k)=m(j(k))
68、由中值定理得:
69、
70、其中,联立以上各式,得:
71、
72、
73、其中,是一个有界项;设计控制律中神经网络权值的更新律为:
74、
75、其中,σ,γ是待设计的正参数,且η(k)=s(χ(k))/(1+||s(χ(k)||2z12(k)),上式等号两端减去w*得神经网络权值估计误差动态为:
76、
77、本发明的有益效果在于:
78、1、本发明通过利用双曲正切函数构建了一个新的、更简单的非线性函数来解决无人车系统中执行器受到的非线性输入饱和的影响。在该函数的构建中不仅避免了开关函数的使用,为输入饱和问题的解决提供了一个新的方法。
79、2、本发明通过设计事件触发机制,针对网络带宽资源有限问题,在无人车系统的控制器和传感器之间的网络通道引入该事件触发机制,减少不必要的信号传输,达到有效节省网络带宽资源的目的。
80、3、本发明通过对现有的自适应事件触发条件进行改进,通过在现有触发条件的分母中引入可调的设计参数,有效地增加了暂态过程中的触发次数。利用这样的阈值系数,所构造的事件触发条件不仅改善了暂态控制性能,而且便于实现。
81、4、本发明通过将变量替换法和神经网络逼近技术相结合,提出了一种新的基于反步法的自适应事件触发跟踪控制框架。该框架有效减少了控制信号的延迟,从而使得网络化无人车系统获得了良好的跟踪性能。
82、本发明的其他优点、目标和特征在某种程度上将在随后的说明书中进行阐述,并且在某种程度上,基于对下文的考察研究对本领域技术人员而言将是显而易见的,或者可以从本发明的实践中得到教导。本发明的目标和其他优点可以通过下面的说明书来实现和获得。
- 还没有人留言评论。精彩留言会获得点赞!