一种马尔可夫跳变双线性系统的最优控制器设计方法
本发明涉及控制器设计,具体而言,尤其涉及一种马尔可夫跳变双线性系统的最优控制器设计方法。
背景技术:
1、马尔可夫跳变线性系统由于其能够捕捉系统动态变化中的随机性和不确定性等特点,在控制理论、通信系统、金融建模以及机器学习等领域引起了广泛关注和研究。然而,大部分实际系统中往往存在一些非线性特性,这使得马尔可夫跳变线性系统无法精确地表示此类系统。双线性系统是一类特殊的非线性系统,它是线性系统模型的一种推广,同时具有线性与非线性这种特殊的变结构特性,因而更能准确地描述一类实际过程。同时具有马尔可夫跳变特性和双线性特性的系统被称为马尔可夫跳变双线性系统,其中系统的状态在离散时间内会以一定的概率发生跳变,并且系统的动态特性同时包含了非线性和双线性的因素。这种模型的应用覆盖多个领域,由于其能够同时考虑状态跳变和非线性特性,因此提供了更为精确和适应性强的动态系统建模手段。
2、马尔可夫跳变线性系统的最优控制问题一般可以通过变分法、庞特里亚金极大值原理和线性矩阵不等式等方法求解。然而,这些控制器设计方法并不适用于马尔可夫跳变双线性系统。因此,设计马尔可夫跳变双线性系统最优控制器对于推动马尔可夫跳变双线性系统在通信、控制、金融等领域的发展,提高系统在实际应用中的效率和可靠性具有重要意义。
3、现有技术中,涉及马尔可夫跳变双线性系统最优控制器设计的文献包括:“colaneri p, middleton r h, blanchini f. optimal control of a class ofpositive markovian bilinear systems[j]. nonlinear analysis: hybrid systems,2016, 21: 155-170.”该文献在保证性能指标是凸函数的情况下,应用庞特里亚金极小值原理求解了一类连续时间正双线性正马尔可夫跳变系统的优化控制问题。专利公开号为cn113359443a的发明专利,公开了一种广义时滞马尔可夫跳变系统的复合抗干扰控制方法,该专利基于扰动观测器设计了一种针对马尔可夫跳变线性系统广义h∞控制器。专利公开号为cn112415898a的发明专利申请,公开了一种带非线性的广义时滞马尔可夫跳变系统的控制方法,针对连续时间的时滞非线性马尔可夫跳变系统,设计了一种滑模控制器。然而上述公开的相关文献存在如下缺陷:
4、文献“colaneri p, middleton r h, blanchini f. optimal control of aclass of positive markovian bilinear systems[j]. nonlinear analysis: hybridsystems, 2016, 21: 155-170.”所提出的优化控制方法只是针对了连续系统,无法应用于离散时间的马尔可夫跳变双线性系统最优控制问题的求解,且控制器是在保证性能指标是凸函数的情况下设计得到的,保守性较高;
5、专利公开号为cn113359443a的发明专利申请和专利公开号为cn112415898a的发明专利申请,所提出的控制方法解决了马尔可夫跳变线性系统和连续时间时滞非线性马尔可夫跳变系统的最优控制问题,然而对于同时包含马尔可夫跳变特性和非线性特性的离散时间马尔可夫跳变双线性系统并不适用。
技术实现思路
1、根据上述提出的技术问题,提供一种马尔可夫跳变双线性系统的最优控制器设计方法。本发明主要利用克罗托夫全局最优性原理,在充分考虑系统外部干扰和输入约束的情况下,通过迭代优化求解马尔可夫跳变双线性系统的最优控制问题,所得结果同样适用于马尔可夫跳变线性系统,具有较强的广泛性,所得控制器结构简单,计算方便,稳定性更好,抗干扰性更强。
2、本发明采用的技术手段如下:
3、一种马尔可夫跳变双线性系统的最优控制器设计方法,包括:
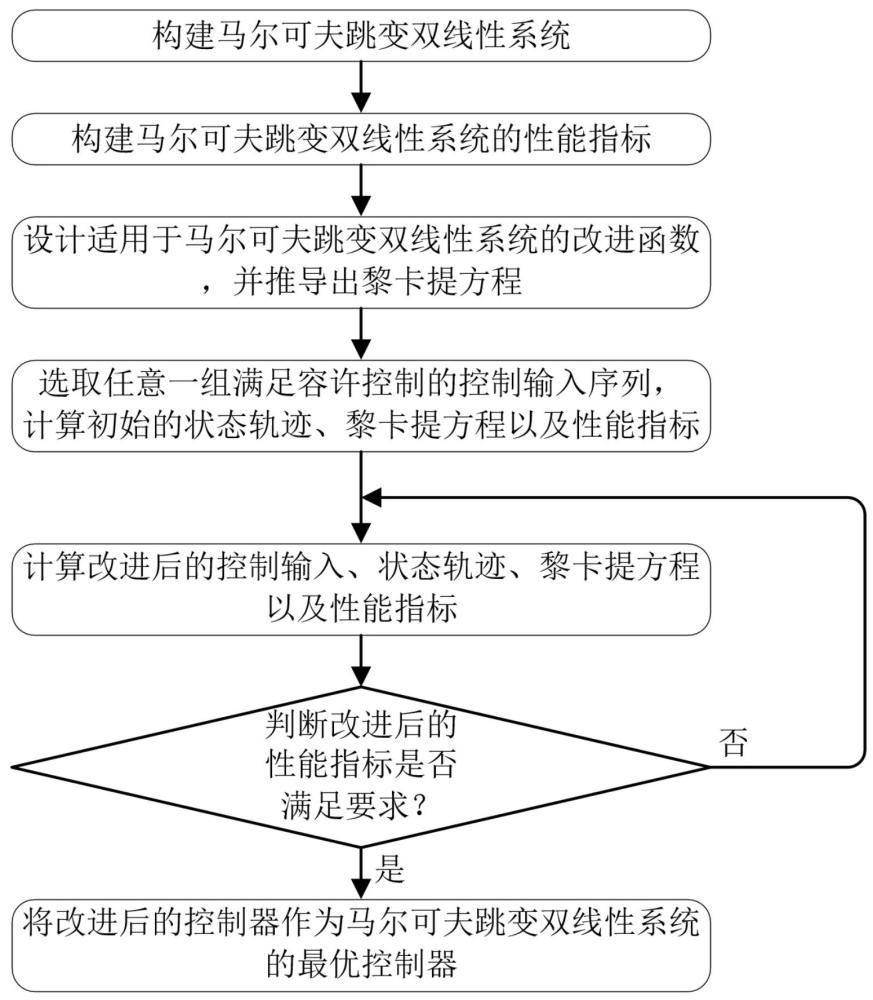
4、s1、构建马尔可夫跳变双线性系统的系统模型;
5、s2、基于构建的系统模型,构建马尔可夫跳变双线性系统的性能指标;
6、s3、设计适用于马尔可夫跳变双线性系统的改进函数,并根据改进函数推导出适用于马尔可夫跳变双线性系统的黎卡提方程;
7、s4、选取任意一组满足容许控制的控制输入序列,计算初始的状态轨迹、黎卡提方程以及性能指标;
8、s5、计算改进后的控制输入、状态轨迹、黎卡提方程以及性能指标;
9、s6、判断改进后的性能指标是否满足要求,若改进后的性能指标不满足要求,则返回执行步骤s5;若改进后的性能指标满足要求,则将改进后的控制器作为马尔可夫跳变双线性系统的最优控制器。
10、进一步地,所述步骤s1中,构建的马尔可夫跳变双线性系统的系统模型,具体为:
11、;
12、其中,表示时刻,表示终端时刻的值;表示系统的状态变量,表示系统的输入变量,表示系统的外部扰动,并假设是零均值的高斯白噪声序列,即,,表示数学期望,表示噪声序列在时刻取值的转置,代表噪声协方差矩阵,表示符号函数,当时,,否则;表示克罗内克积;,,和分别表示依赖于模态的系统矩阵;表示马尔可夫链的模态,表示模态的个数,模态的转移概率为,即在时刻的情况下时刻的概率为,将表示为在时刻的概率,也就是;并同时假定系统外部扰动序列,马尔可夫链以及系统初始状态都是相互独立的。
13、进一步地,所述步骤s2包括:
14、基于构建的所述系统模型,求解一组满足系统方程且最优的反馈控制输入,使得构建的所述性能指标最小。
15、进一步地,所述步骤s2中,构建马尔可夫跳变双线性系统的性能指标,具体包括:
16、s21、构建马尔可夫跳变双线性系统的性能指标,如下:
17、;
18、其中,为终端时刻的系统状态值,半正定对称矩阵和正定对称矩阵表示性能指标中的权重矩阵;表示矩阵的转置;
19、s22、根据步骤s21构建的马尔可夫跳变双线性系统的性能指标,构造过程性能指标和终端性能指标:
20、;
21、。
22、进一步地,所述步骤s3,具体包括:
23、s31、将所述步骤s1构建的马尔可夫跳变双线性系统的系统模型转化为不含克罗内克积的形式:
24、;
25、其中,令表示矩阵里面的元素,将写成的形式;,;表示时刻输入向量中的第个分量;
26、s32、设计适用于马尔可夫跳变双线性系统的改进函数;根据克罗托夫全局最优充分条件,改进函数满足以下条件:
27、;
28、;
29、其中,表示状态轨迹的集合,表示在时刻处的值,表示一条状态轨迹;函数和定义为:
30、;
31、;
32、s33、在满足步骤s32中两个条件的要求下,将改进函数设计为:
33、;
34、s34、计算改进函数在时刻的值:
35、;
36、s35、假设在时刻马尔可夫链的模态为,时刻马尔可夫链的模态为,,计算函数和:
37、;
38、;
39、s36、根据以上步骤,推导出黎卡提方程和在,时的表达式:
40、;
41、;
42、其中,终端条件为:,。
43、进一步地,所述步骤s4,具体包括:
44、s41、选取任意一组满足容许控制的控制输入序列,其中表示对控制输入序列的约束,将任意的一个系统初始状态值以及任意的一个初始马尔可夫模态代入所述步骤s31转化的马尔可夫跳变双线性系统,得到一组初始的状态轨迹:
45、;
46、s42、将选定的控制输入序列代入到所述步骤s36给出的黎卡提方程,通过逆向迭代求解和:
47、;
48、;
49、s43、将所述步骤s41给出的控制输入序列和初始的状态轨迹代入到所述步骤s2构建的性能指标,得到:
50、。
51、进一步地,所述步骤s5,具体包括:
52、s51、计算改进后的控制输入,其中表示迭代次数;将,,,代入所述步骤s32中的函数,将函数转化为如下形式:
53、;
54、其中,
55、;
56、;
57、;
58、根据最优性原理,最优控制输入能够保证函数的导数等于零,最终得到改进后的控制输入为:
59、;
60、s52、将所述步骤s51得到的改进控制输入代入所述步骤s31转化的马尔可夫跳变双线性系统,得到一组改进后的状态轨迹:
61、;
62、s53、将所述步骤s51得到的改进控制输入代入到所述步骤s36给出的黎卡提方程,通过逆向迭代求解和:
63、;
64、;
65、s54、将所述步骤s51得到的改进控制输入和所述步骤s52得到的改进后的状态轨迹代入到所述步骤s2构建的性能指标,得到:
66、。
67、较现有技术相比,本发明具有以下优点:
68、1、本发明提供的马尔可夫跳变双线性系统的最优控制器设计方法,利用克罗托夫全局最优充分条件,设计了马尔可夫跳变双线性系统最优控制器,将马尔可夫跳变双线性系统的最优控制问题转化成了几个优化问题,通过迭代不断地改进控制器参数,并最终得到了最优的控制器,由于最优控制器是通过迭代改进得到的,因此该控制器是收敛的,相较于直接求解最优控制问题,利用本发明方法设计的控制器更为简单高效,实用性更强,稳定性更好。
69、2、本发明提供的马尔可夫跳变双线性系统的最优控制器设计方法,设计了针对马尔可夫跳变双线性系统的改进函数,其形式类似于马尔可夫跳变线性系统中的李雅普诺夫函数,因此,本发明所提控制器设计方法不仅适用于包含非线性特性的马尔可夫跳变双线性系统,对马尔可夫跳变线性系统的最优控制器设计同样有效,本发明方法具有较强的广泛性和适用性。
70、3、本发明提供的马尔可夫跳变双线性系统的最优控制器设计方法,其设计的控制器专门针对离散马尔可夫跳变双线性系统,填补了最优控制理论应用在马尔可夫跳变双线性系统中的不足。
71、4、本发明提供的马尔可夫跳变双线性系统的最优控制器设计方法,其控制器的设计过程充分考虑了系统外部扰动和输入约束,因此具备更强的鲁棒性和抗干扰能力。
72、基于上述理由本发明可在控制器设计等领域广泛推广。
- 还没有人留言评论。精彩留言会获得点赞!