多智能体分布式区域覆盖控制方法、智能体和程序产品
本发明涉及一种多智能体分布式区域覆盖控制方法、智能体和程序产品。
背景技术:
1、多智能体区域覆盖是指一组智能体协同合作,以覆盖给定的目标区域。每个智能体在空间中移动,并根据一定的策略和规则,以最佳方式覆盖目标区域。
2、多智能体区域覆盖应用广泛,涉及多个领域和行业。
3、传感器网络:在无线传感器网络中,区域覆盖可以用于监测和感知环境。传感器节点被部署在区域内,通过合理的布局和移动策略,实现对目标区域的覆盖,以收集环境数据和监测事件。
4、地理信息系统(gis):区域覆盖在gis中被广泛应用于地图绘制和空间分析。通过将智能体(如无人机或机器人)部署在区域内,可以实现对地理空间的覆盖和数据采集,用于制作准确的地图和进行地理信息分析。
5、农业和农业机器人:在农业领域,区域覆盖可用于优化农田的耕作和施肥。通过智能机器人或农业机器人的协同工作,将作物的种植和管理过程中的操作覆盖整个农田,实现高效的农业生产。
6、建筑和室内导航:区域覆盖在建筑和室内导航中起到重要作用。通过智能体(如机器人、无人车或无人机)在建筑物内部移动,可以实现对室内空间的覆盖和导航,用于建筑设计、安全监控和室内定位等应用。
7、环境监测和保护:区域覆盖可用于环境监测和保护领域。通过部署智能体在特定区域,监测环境参数(如空气质量、水质等),实现对环境的覆盖和监测,用于环境保护、灾害预警和生态研究等。
8、物流和仓储管理:在物流和仓储管理中,区域覆盖可用于优化货物的存储和分配。通过智能机器人或自动导航车辆的协同工作,实现对仓库或物流中心内部的货物覆盖和管理,提高物流效率和准确性。
9、然而多智能体区域覆盖问题是一个复杂的问题,需要深入研究智能体的感知、决策和协作机制,并结合合适的控制方法和技术来实现较高的覆盖效率和良好的覆盖效果。解决方法可以基于规划、优化或启发式算法。
10、现存方法存在的不足主要体现在以下几个方面。
11、集中式的方法依靠一个控制中心点为每一个智能体分配任务并规划其到达目标位置的移动轨迹,在集群规模较大时效率低下且存在单点崩溃的风险。
12、基于任务分配的分布式方法,在局部决策时也会存在冲突,难以避免需要局部的任务交换,会使得计算复杂度提升。
13、优化方法通过定义适当的目标函数和约束条件用数学优化技术寻找最优的智能体配置和移动策略,对于非凸图形计算复杂度通常较高且存在陷入局部最优解的问题。
14、基于梯度的方法通过计算目标区域的梯度信息并将智能体移动方向与梯度方向对齐,这一方法存在容易陷入局部最优解、初始化敏感、存在梯度消失/爆炸风险等问题。
15、启发式算法如遗传算法、粒子群算法等存在调参困难、计算复杂度高以及可能陷入局部最优解的问题,并且在区域形状复杂时存在收敛性和鲁棒性方面的挑战。
16、中国专利cn114489147b《无人机集群自组织区域覆盖方法、装置和设备》提出基于无人机排斥力、重点覆盖区域吸引力以及边界排斥力,计算目标无人机所受的合力。
17、本发明提出全新的解决方案。
技术实现思路
1、本发明提供一种多智能体分布式区域覆盖控制方法、智能体和程序产品。
2、本发明采用如下技术方案:一种多智能体分布式区域覆盖控制方法,包括:
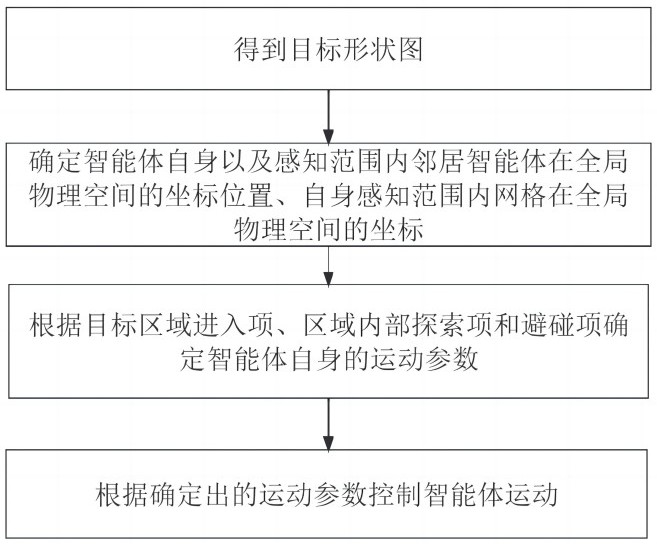
3、得到目标形状图;
4、确定智能体自身以及感知范围内邻居智能体在全局物理空间的坐标位置、自身感知范围内网格在全局物理空间的坐标;
5、根据目标区域进入项、区域内部探索项和避碰项确定智能体自身的运动参数;
6、根据确定出的运动参数控制智能体运动;
7、其中,目标形状图由多个网格拼接而成,目标形状图具有环绕目标覆盖区域的平滑过渡区域、以及位于平滑过渡区域外侧的恒值非目标覆盖区域,每个网格具有网格控制参数,目标覆盖区域内网格的网格控制参数相等,恒值非目标区域内网格的网格控制参数相等,平滑过渡区内网格的网格控制参数按照从目标覆盖区域指向恒值非目标区域的方向平滑过渡;
8、其中,目标区域进入项是智能体自身根据感知范围内属于平滑过渡区域和目标覆盖区域的网格在全局物理空间的坐标以及自身在全局物理空间的坐标确定的,用于将智能体自身推入目标覆盖区域;
9、其中,区域内部探索项是智能体自身根据感知范围内属于目标覆盖区域且未被其余智能体占据的网格在全局物理空间的坐标以及自身在全局物理空间的坐标确定的,用于将智能体自身推入目标覆盖区域内未被其余智能体占据的网格;
10、其中,避碰项用于防止智能体发生碰撞。
11、例如避碰项是智能体自身根据感知范围内其余智能体和/或障碍点在全局物理空间的坐标以及自身在全局物理空间的坐标确定的。
12、本发明采用如下技术方案:一种智能体,包括存储器和处理器,存储器上存储程序,处理器运行该程序以执行前述的多智能体分布式区域覆盖控制方法。
13、本发明采用如下技术方案:一种程序产品,该程序产品在处理器上运行时执行前述的多智能体分布式区域覆盖控制方法。
14、本发明的技术方案具有如下优势。
15、对复杂形状区域覆盖问题的适应性强:在未完成覆盖任务时,智能体往往会主动放弃当前位置而对未覆盖区域不断进行探索,并且智能体可以灵活地根据周围环境的变化实时调整移动策略,这使得该方法适用于非凸复杂区域的覆盖任务。
16、在集群规模较大时仍能保持高效:本方法采用基于无私探索的分布式控制方法,智能体通过局部感知和通信进行信息交流和决策,减少了对集中式控制和全局信息的依赖,同时也不依赖任务分配,计算复杂度低,能够高效解决不同规模的区域覆盖任务。
17、对个体故障具有较强的鲁棒性:由于完成区域覆盖任务是通过局部感知和协商来实现的,当某一智能体发生故障或失效时,其他智能体仍然可以正常协作,继续完成覆盖任务。
18、对智能体初始位置无要求:随机初始化智能体的位置,都可以达到良好的覆盖效果。
技术特征:
1.一种多智能体分布式区域覆盖控制方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,智能体自身的感知范围以感知半径表示,感知半径是根据感知半径内属于平滑过渡区域和目标覆盖区域的网格的网格控制参数进行迭代更新的。
3.根据权利要求1所述的方法,其特征在于,智能体i的目标区域进入项记为;
4.根据权利要求1所述的方法,其特征在于,智能体i的区域内部探索项记为;
5.根据权利要求1所述的方法,其特征在于,智能体i的避碰项记为;
6.根据权利要求1所述的方法,其特征在于,智能体 i 的速度vi由如下公式确定:
7.根据权利要求1所述的方法,其特征在于,平滑过渡区域分为环绕目标覆盖区域的多个环形区域,每个环形区域厚度为1个网格,同一个环形区域内网格的网格控制参数相等,按照远离目标覆盖区域的方向,平滑过渡区域内网格的网格控制参数单调变化。
8.根据权利要求7所述的方法,其特征在于,平滑过渡区域内网格的网格控制参数等梯度变化,或者,越靠近目标覆盖区域梯度越小。
9.一种智能体,其特征在于,包括存储器和处理器,存储器上存储程序,处理器运行该程序以执行根据权利要求1至8中任一项所述的多智能体分布式区域覆盖控制方法。
10.一种程序产品,其特征在于,该程序产品在处理器上运行时执行根据权利要求1至8中任一项所述的多智能体分布式区域覆盖控制方法。
技术总结
本发明公开了一种多智能体分布式区域覆盖控制方法、智能体和程序产品。该方法包括:得到目标形状图;确定自身以及感知范围内邻居智能体在全局物理空间的坐标位置、自身感知范围内网格在全局物理空间的坐标;根据目标区域进入项、区域内部探索项和避碰项确定智能体自身的运动参数;根据确定出的运动参数控制智能体运动。该方法适应性强、高效、鲁棒性强、对初始位置无约束。
技术研发人员:吕金虎,孙贵宾,曹筱可,刘克新,李容江
受保护的技术使用者:北京航空航天大学
技术研发日:
技术公布日:2024/3/27
- 还没有人留言评论。精彩留言会获得点赞!