一种自选择最优路径的智能生态浮岛装置
本发明涉及资源与环境,尤其涉及一种自选择最优路径的智能生态浮岛装置。
背景技术:
1、随着经济的快速发展,我国所面临的水环境污染问题日益严重,湖泊、水库、水塘等地水质恶化及富营养化问题日渐突出。目前,我国在上述静水环境的水质治理领域基本采用的还是代价大、耗能高、自动化程度较低的治理方式,其中主要代表为:粗放型的化学试剂投放、大面积和高耗能的净水设备铺设以及固定式的水生植物种植。传统的净水方式,已经不能满足实际生活中人们低碳高效地净化水质的要求。目前我国的水质治理工程依然对移动生态浮岛的研究与应用相对不足。而非移动式生态浮岛方法,治理过程中考虑到污染物可能会随着水流进行扩散迁移,要达到一定的净化效果则需要浮岛覆盖面积达到水面的30%以上。因此,市场提出了提高浮岛的治理效率,满足社会可持续化发展,低能耗地利用生态杠杆提高治理效益的需要。
技术实现思路
1、为了克服传统生态浮岛智能化程度低、治理时间长、机械化操作程度低、制作施工周期长等问题,本发明提供了一种自选择最优路径的智能生态浮岛装置,该智能生态浮岛装置包括主控单元、供电单元、推进单元、锚泊单元、监测单元、通信单元、定位单元、上位机软件和云平台,所述推进单元包括推进器,包括减速电机和超声波收发装置;
2、上位机开机,并进行系统初始化,通过遥感或地理信息数据库获得待治理水域形状的栅格数据,将数据输入主控单元中;上位机主控单元内置按照周长四等分,四个等分点顺时针被确定为四个初始目的地,第五个初始目的地则确定于第一、三初始目的地连线与第二、四初始目的地连线的交点位置;
3、主控单元启动两侧推进器,按照顺序前往第一、二、五、四、三目的地;在航行过程中,主控单元将定位单元获取的当前位置与预定轨迹进行实时对比,若浮岛轨迹发生偏离,则通过控制算法进行轨迹纠正;浮岛侧面的超声波收发装置在浮岛行进中检测障碍物,在主控单元的控制下实现自主避障;主控单元通过调节浮岛两侧推进器的转速控制速度,利用差速实现转向;
4、浮岛每到达一个初始目的地,关闭推进器,开始放锚,放锚前,由浮岛上的超声波收发装置向水底发射信号测出水深d,主控单元确定放锚长度,控制电机调整放出的锚绳长度,下放固定锚;
5、完成装置在初始目的地的固定工作后,监测单元开始获取水质数据,数据读取间隔为15s,由主控单元内置程序识别并记录水质数据;
6、当一个初始目的地停留第一预设时间后,主控单元控制电机收锚,前往下一个初始目的地,重复以上工作,直至完成所有初始目的地的数据采集工作。
7、完成初始目的地的数据采集工作后,主控单元控制推进器前往第五初始目的地;
8、主控单元内置软件开始规划治理过程的前进路径,以水面为平面进行二维平面建模,以第一、二、三、四初始目的地污染物浓度(b1、b2、b3、b4)与第五初始目的地污染物浓度(b5)、第一、二、三、四初始目的地与第五初始目的地距离(j1、j2、j3、j4)二者作为计算依据,以第五初始目的地为起点与第一、二、三、四初始目的地为终点的连线作为有方向的单位向量进行矢量叠加,叠加结果便为的首次前进方向首次前进方向权重(qf1、qf2、qf3、qf4)的计算公式如下:
9、
10、式中,n=1、2、3、4,i=1、2、3、4,依次进行计算;qfn表示首次前进方向权重,qfn为每次计算中第一无量纲因子,式中qfn可为负数,表示为矢量叠加后的反方向;jn表示第一、二、三、四初始目的地与第五初始目的地距离,bn表示初始目的地污染物浓度,qfi表示第i个初始目的地的权重,ji表示第i个初始目的地与第五初始目的地距离,bi表示第i个初始目的地污染物浓度,b5表示第五初始目的地污染物浓度;
11、确认了各方向权重后,依据方向权重及各单位向量首次方向的确定依据以下计算公式:
12、
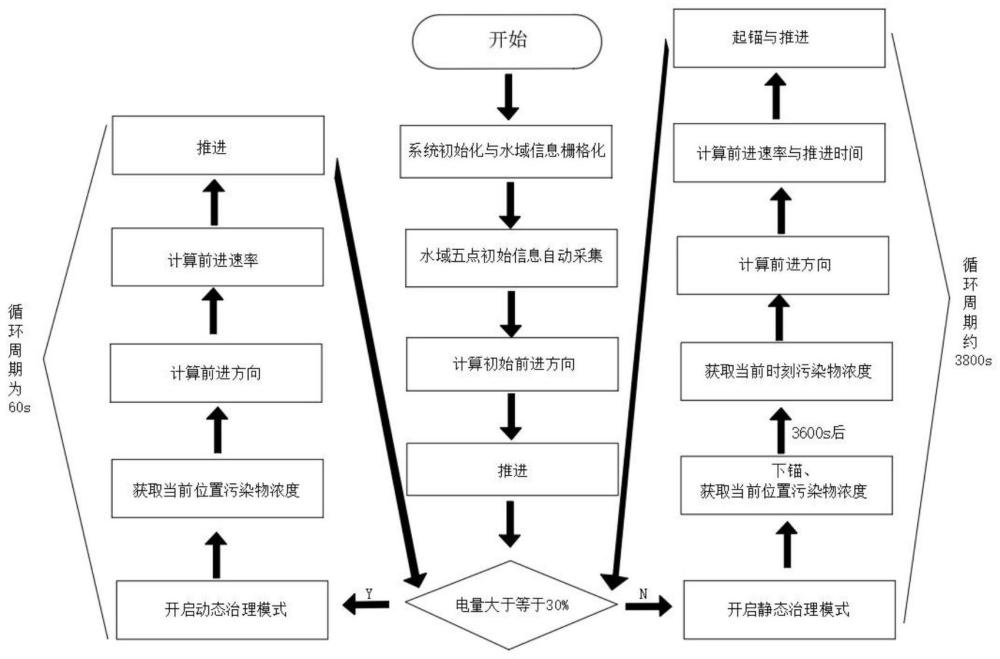
13、其中,qf1、qf2、qf3、qf4分别表示4个首次前进方向权重,分别表示以第五初始目的地为起点与第一、二、三、四初始目的地为终点的连线作为有方向的单位向量;
14、第五初始目的地与第一、二、三、四初始目的地污染物浓度差值与其之间的距离比值越大,该方向权重越大;
15、确定了首次前进方向后主控单元控制开启推进器,按照首次前进方向前进;
16、浮岛运动的同时,监测单元实时读取水质数据,主控单元每隔第二预设时间检测供电单元内剩余电量,并由主控单元内置程序记录水质数据;
17、当主控单元检测到供电单元内电量高于或等于预设电量时候,开启动态治理模式。主控单元内置软件动态规划治理过程的前进路径,并协调控制监测单元、推进单元、供电单元、定位单元与通信单元;
18、当主控单元检测到供电单元内电量低于预设电量时,开启低电量治理模式。主控单元内置软件动态规划治理过程的前进路径,并协调控制监测单元、推进单元、供电单元、定位单元与通信单元;
19、治理的全过程采用通信单元将水质和位置坐标上传到云平台,用户在终端登录云平台后可查看数据和下发指令,可实现一键召回和前往特定位置的功能。
20、进一步地,所述动态治理模式,目的在于提高治理效率,主动追索污染物梯度最大方向,治理装置按照实时更新的最优路径前进与治理,实现过程如下:
21、前进过程中每间隔第三预设时间,主控单元控制监测单元获取当前位置污染物浓度a,同时主控单元内置软件以水面为平面进行二维平面建模,依据以上一个时间段前进方向首次前进方向和当前污染物浓度变化梯度计算下一时间的前进方向
22、依据污染物浓度变化梯度大小,计算下一时间段四个方向权重:当前位置污染物浓度a与第一、二、三、四初始目的地的污染物浓度b1、b2、b3、b4,当前位置与第一、二、三、四初始目的地的距离d1、d2、d3、d4,以当前位置与第一、二、三、四初始目的地为终点的连线作为有方向的单位向量依照下述公式计算四个方向权重q1,q2,q3,q4:
23、
24、其中,a表示当前位置污染物浓度,qn表示方向权重,bn表示初始目的地污染物浓度,dn表示当前位置与初始目的地的距离,di表示浮岛装置当前位置与第i个初始目的地的距离,n=1、2、3、4,i=1、2、3、4,qn为每次计算中的第二无量纲因子,qi为第i次计算中的第二无量纲因子,qn可为负数,表示为矢量叠加后的反方向;当前位置与初始目的地污染物浓度随距离变化的梯度越大,该方向权重qn越大;
25、依据污染物治理达标程度,为最大程度追索最大污染梯度,将基于当前污染物浓度变化梯度的部分计算权重,依据当前位置污染物浓度a、上一个时间段所在位置污染物浓度a1、上两个时间段所在位置污染物浓度a2,计算学习因子u1、惯性因子u2以及初始因子u3取值如下:
26、当时,当前前进方向与污染物浓度梯度最大方向接近,u1=0,u2=1,u3=0,公式(4)作用结果为沿上一时间段前进方向继续前进;
27、当时,当前前进方向较为接近污染物浓度梯度最大的方向,增加惯性因子u2以提高上一时间段前进方向权重,减小计算学习因子u1以降低当前位置计算结果为权重,此时u1=0.9-u2,u3=0.1,公式(4)作用结果为遵循当前前进方向,仅作小幅度调整;
28、当时,当前前进方向相对偏离污染物浓度梯度最大的方向,减小惯性因子u2以降低上一时间段前进方向权重,增大计算学习因子u1以提高当前位置计算结果权重,此时u1=0.9-u2,u3=0.1,公式(4)作用结果为改变当前前进方向;
29、确认了计算学习因子u1、惯性因子u2以及初始因子u3后,依据上述计算所得方向权重q1,q2,q3,q4、上一个时间段前进方向及首次前进方向进行矢量叠加,下一时间段方向的确定依据以下计算公式:
30、
31、本次计算结束后,计算结果迭代成为上一个时间段前进方向所记录污染物浓度a1将在下次计算时迭代成为a2,以此类推;
32、首次迭代时,上一个时间段污染物浓度a1取第五个初始目的地污染物浓度b5,缺乏上两个时间段污染物浓度数据a2取值0,由于缺失上一个时间段前进方向则以首次前进方向替代上一位置前进方向即该次计算中这样虽然会使得第一次迭代时产生偏离污染物浓度梯度变化最大的方向,但是由于迭代时间较短,可以较快纠正回目标方向;
33、得到当前时间段内的前进方向后,主控单元持续控制推进单元、供电单元、定位单元与通信单元运作;监测单元持续运作的同时,推进单元持续缓慢推进,推进速率的计算综合考虑目标处理物的浓度变化梯度大小、与污染物合格浓度差距、浮岛装置位置以及污染场指数,推进速率v的计算公式如下:
34、
35、其中,v表示推进速率,其单位为单位m/s,a表示当前位置污染物浓度,a1表示上一个时间段位置污染物浓度,di表示浮岛装置当前位置与第i初始目的地距离,单位为m,i=1,2,3,4,b表示污染物合格浓度,p表示污染场指数,p∈(0,1],t表示治理期限,单位为s;
36、推进速率v随着当前位置污染物浓度差值与上一时间段位置污染物浓度的比值增加而增加;
37、动态治理模式中,供电单元供电的优先顺序为:监测单元>推进单元>通信单元,当主控单元监测到供电单元电量小于预设电量时,主动更改治理模式为低电量治理模式,反之则维持为动态治理模式。
38、进一步地,所述低电量治理模式,目的在于装置通过关闭推进单元、降低监测频率,并增加规划路径过程中惯性权重的方式,完成能量储蓄,并实施污染处理,实现过程如下:
39、主控单元判断开始低电量治理模式治理后,关闭推进器,开始放锚,放锚前,由浮岛上的超声波收发装置向水底发射信号测出水深d,主控单元确定放锚长度,控制电机调整放出的锚绳长度,下放固定锚;
40、下锚后,主控单元控制监测单元获取低电量治理模式下的当前位置污染物浓度r,开始静态治理工作;
41、第四预设时间后,主控单元内置软件以水面为平面进行二维平面建模,依据以上一个时间段前进方向首次前进方向和治理期间污染物浓度变化梯度计算下一时间的前进方向
42、依据污染物浓度变化梯度大小,计算下一时间段四个方向权重q1、q2、q3、q4:
43、
44、式中,r表示低电量治理模式下的当前位置污染物浓度,n=1、2、3、4,i=1、2、3、4,qn为每次计算中的第二无量纲因子,bn表示初始目的地污染物浓度,即b1、b2、b3、b4表示第一、二、三、四初始目的地的污染物浓度,dn表示当前位置与初始目的地的距离,即d1、d2、d3、d4表示当前位置与第一、二、三、四初始目的地的距离,di表示浮岛装置当前位置与第i个初始目的地的距离,qi为第i次计算中的第二无量纲因子;当前位置与初始目的地污染物浓度随距离变化的梯度越大,该方向权重qn越大;
45、依据污染物治理达标程度,为最大程度追索最大污染梯度,将基于当前污染物浓度变化梯度的部分计算权重,依据当前时间段所在位置治理结束后污染物浓度r1、上一个时间段所在位置治理结束后污染物浓度r2、上两个时间段所在位置治理结束后污染物浓度r3,计算学习因子u1、惯性因子u2以及初始因子u3取值如下:
46、当时,当前前进方向与污染物浓度梯度最大方向接近,u1=0,u2=1,u3=0,公式(7)作用结果为沿上一时间段前进方向继续前进;
47、当时,当前前进方向较为接近污染物浓度梯度最大的方向,增加惯性因子u2以提高上一时间段前进方向权重,减小计算学习因子u1以降低当前位置计算结果权重,当前位置计算结果的计算公式为:其中,表示以当前位置与第一、二、三、四初始目的地为终点的连线作为有方向的单位向量,此时u1=0.9-u2,u3=0.1,公式(7)作用结果为遵循当前前进方向;
48、当时,当前前进方向相对偏离污染物浓度梯度最大的方向,减小惯性因子u2以降低上一时间段前进方向权重,增大计算学习因子u1以提高当前位置计算结果权重,当前位置计算结果的计算公式为:
49、此时u1=0.9-u2,u3=0.1,公式(7)作用结果为改变当前前进方向;
50、确认了计算学习因子u1、惯性因子u2以及初始因子u3后,依据上述计算所得方向权重q1、q2、q3、q4,上一个时间段前进方向及首次前进方向进行矢量叠加,依据以下计算公式确定下一时间段方向
51、
52、本次计算结束后,计算结果迭代成为上一个时间段前进方向所记录当前时间段所在位置治理结束后污染物浓度r1将在下次计算时迭代成为上一个时间段所在位置治理结束后污染物浓度r2,以此类推;
53、首次迭代时,上一个时间段治理结束后污染物浓度r2取第五个初始目的地污染物浓度b5,将缺乏的上两个时间段治理结束后污染物浓度数据r3取为1.05*b5,由于缺失上一个时间段前进方向所以以首次前进方向替代上一位置前进方向即该次计算中以平衡首次移动中学习因子与惯性因子的关系;
54、当由低电量治理模式切换进入动态治理模式时,进入计算中成为上一个时间段及之前时间段的污染物浓度的是治理结束后的污染物浓度数据,而非治理开始前的污染物浓度数据;
55、得到当前时间段内的前进方向后,主控单元控制推进单元、供电单元、定位单元与通信单元运作;推进速率的计算综合污染物浓度变化梯度大小、浮岛装置位置、电量变化以及污染场指数,推进速率v的计算公式如下:
56、
57、其中,v表示推进速率,其单位为单位m/s,b表示污染物合格浓度,c1、c2分别表示下锚前后的电量百分比,di表示浮岛装置与第i初始目的地距离,i=1,2,3,4,p表示污染场指数,p∈(0,1],t表示治理期限;
58、推进速率v随着电量百分比差值增大而小幅度增加,随着下锚前后污染物浓度差值与下锚前污染物浓度的比值增加而增加;
59、计算得到推进速率后,主控单元控制锚泊单元起锚,控制推进单元按照所计算前进方向与推进速率推进秒;前进结束后,若电量仍低于30%,则再次重复低电量治理模式;
60、低电量治理模式中,供电单元供电的优先顺序为:监测单元>推进单元>通信单元,当主控单元监测到供电单元电量大于或等于预设电量时,主动更改治理模式为动态治理模式。
61、进一步地,所述主控单元采用stm32f103c8t6单片机,所述主控单元系统初始化后,负责串联各单元运作,包括首次前进方向的计算、动态治理模式与低电量治理模式的选择、两种模式中方向与速度的计算、电量的监测与分配选择、监测数据的对接处理都由主控单元负责计算与选择。
62、进一步地,所述锚泊单元,包括带减速箱的直流电机和失电制动器,失电制动器和减速箱连接在直流电机的转轴上,所述失电制动器包括传动轴、衔铁、制动盘、弹簧和法兰盘,铁锚为锚重50kg球形铁锚,采用可升降铁锚固定方式进行固定球形铁锚,使用带减速箱的直流电机进行牵引,传动轴半径最大为3cm;所述减速电机为额定力矩为45kg·cm,额定转速15r/min,功率28w的42gx775r减速电机;超声波收发装置向水底发射信号,测量水深d,从而确定放锚长度;采用失电制动器防止直流电机停机时铁锚下坠,失电制动器通电时,衔铁被吸合,与制动盘脱离,传动轴可正常转动,直流电机断电时,电磁力消失,在失电制动器的作用下,弹簧压住衔铁,制动盘与衔铁及法兰盘之间产生摩擦力矩,用于阻止铁锚下坠。
63、进一步地,所述推进单元采用t60水下推进器,推进器采用2216直流无刷电机,单个推力1.65~2.1kg,推进器最大外径77mm,总长92mm,用于调节两侧螺旋桨的转速使浮岛前进、后退或转向。
64、进一步地,所述供电单元采用太阳能电池板将光能转换为电能,储存到锂电池中,锂电池的输出经过电压变换电路后对浮岛上所有的电子设备供电;太阳能电池板采用了50w功率的电池板,面积640mm*530mm,电池的选择,采用锂电池,电池大小选择12.6v\20a。
65、进一步地,所述监测单元包括五个水质监测传感器、传感器保护装置以及信号处理电路,该传感器保护装置包括探针外附保护壳,具体为,内筒高度20cm,直径10cm,筒壁下方均布2mm内径孔,内筒底部盖可旋开,均布2mm内径孔;内筒直接固定在设备主体下方,起到过滤泥沙和悬浮物作用;外筒通过abs轴承与设备主体连接,主要起到保护传感器不受水流冲击作用;高度50cm,直径20cm,外附等高的不对称弧形板,外筒四周均布直径10mm孔,底部盖可旋开,设计直径20mm孔,用于泥沙在重力作用下离开保护壳;该壳体为内外布孔的双层嵌套圆桶,该圆桶材质为abs塑料,可以在浮岛运动情况下,通过旋转的方式将移动过程中水流带来的冲量转化为转动量来抵消在低速移动时水流对传感器的冲击,能够有效起到保护期内监测传感器的效果。
66、进一步地,所述通信单元采用搭载窄带物联网技术的bc26模块进行信息输出与输入,采用mqtt协议,支持中国移动、中国电信、onenet/andlink、阿里云iot物联网云平台,将水质信息和位置坐标打包发送到云平台,用户在终端设备上登录云平台后即可查看数据或向浮岛发送指令,实现了浮岛与终端的双向数据传输;所述定位单元选用atk-s1216f8-bdgps/北斗模块来获取经纬度信息,支持多种通信波特率,定位精度2.5mcep。
67、进一步地,所述主控单元系统初始化后,负责串联各单元运作,包括首次前进方向的计算、动态治理模式与低电量治理模式的选择、两种模式中方向与速度的计算、电量的监测与分配选择、监测数据的对接处理都由主控单元负责计算与选择。
68、本发明提供的技术方案带来的有益效果是:本发明的装置具备智能化程度较高,操作方便,能耗低、正常使用下磨损率低、低回报高收益等优点。本发明能够实现同时监测与治理水域。相较于传统浮岛占水域面积大、自动化程度低,不容易进行标准化推广等不足与化学试剂投放副作用大、物理抽出处理经济效益低等问题,本发明提供了两种最优化路径地治理模式,能够在可接受时间内,在不产生次生污染物的前提下,最大程度利用太阳能可持续地对富营养化水体进行治理。为我国较为广泛存在地湖泊、水库、池塘等较为容易发生富营养化现象地水体地治理提供十分有效的装置与方法。
- 还没有人留言评论。精彩留言会获得点赞!