基于信息融合的多无人机协同侦察搜索方法及装置
本技术涉及无人机协同侦察,特别是涉及一种基于信息融合的多无人机协同侦察搜索方法及装置。
背景技术:
1、随着无人机系统(unmanned aircraft systems,uas)的不断发展,越来越多种类的无人机被应用到矿物勘探、农业监测、交通测绘、森林搜救等任务领域。无人机具备快速有效覆盖大面积区域的能力,因此在侦察和目标搜索任务中是一种有效的工具。近年来,采用协调方式利用多架无人机进行侦察搜索已经变得越来越受欢迎。首先,多无人机协同侦察搜索(mcrs)允许更广泛的目标区域覆盖,因为它们可以同时侦察不同的区域。此外,每架无人机都可以配备专门的传感器,用于搜索各种不同种类的目标。
2、然而,协调多架无人机进行侦察搜索是一个有挑战性的问题。首先,每架无人机都需要了解其他无人机的位置、速度和侦察策略,以便能够协调行动并避免碰撞;其次,每架无人机都需要能够自主规划最佳的搜索路径,以便能够最大程度地覆盖搜索区域,避免轨迹重叠;第三,多无人机系统需要具备高度的鲁棒性和灵活性,以便能够快速适应不同的任务和环境,从而保持系统的稳定和可靠性。此外,对于侦察搜索任务而言,由于传感器的精度、目标的外观变化以及环境噪声等误差的影响,目标检测算法可能无法返回对搜索区域的结果绝对可信的结果,从而增加了该区域目标存在的不确定性,进而影响侦察结果的准确性。
3、为解决mcrs问题,传统的方法考虑了两个方面。一方面,为解决多架无人机的协同问题,传统的集中控制方法使用一个集中式地面控制站来管理所有无人机的操作,以确保集中决策过程,并促进无人机之间的有效协调。然而,这种方法在可伸缩性和鲁棒性方面存在一些限制,因为单点故障可能会破坏整个系统。另一方面,为解决侦察搜索问题,传统的任务规划技术将无人机的侦察搜索问题建模为覆盖路径规划或混合整数非线性规划,并使用覆盖率作为目标函数,覆盖路径规划可以实现侦察区域的高效覆盖。然而,这种建模方式简单地认为无人机一次覆盖就能获得该区域的全部信息,忽视了无人机传感器可能存在的探测误差和环境噪声。在任务环境简单且无人机数量较少的情况下,这种优化方法可以取得很好的效果。但是,随着无人机数量的增多和环境规模的扩大,这种多无人机的路径规划问题被证明是np-hard的,其计算的时间复杂度和空间复杂度都显著提高。此外,只考虑区域覆盖的侦察搜索忽视了无人机传感器可能存在的目标检测误差。实际上,对侦察区域进行一次覆盖并不能获得目标存在的高置信度结果,因此导致搜索结果不可靠。
技术实现思路
1、基于此,有必要针对上述技术问题,提供一种能够提高多个无人机协同侦察搜索的准确率的基于信息融合的多无人机协同侦察搜索方法及装置。
2、一种基于信息融合的多无人机协同侦察搜索方法,所述方法包括:
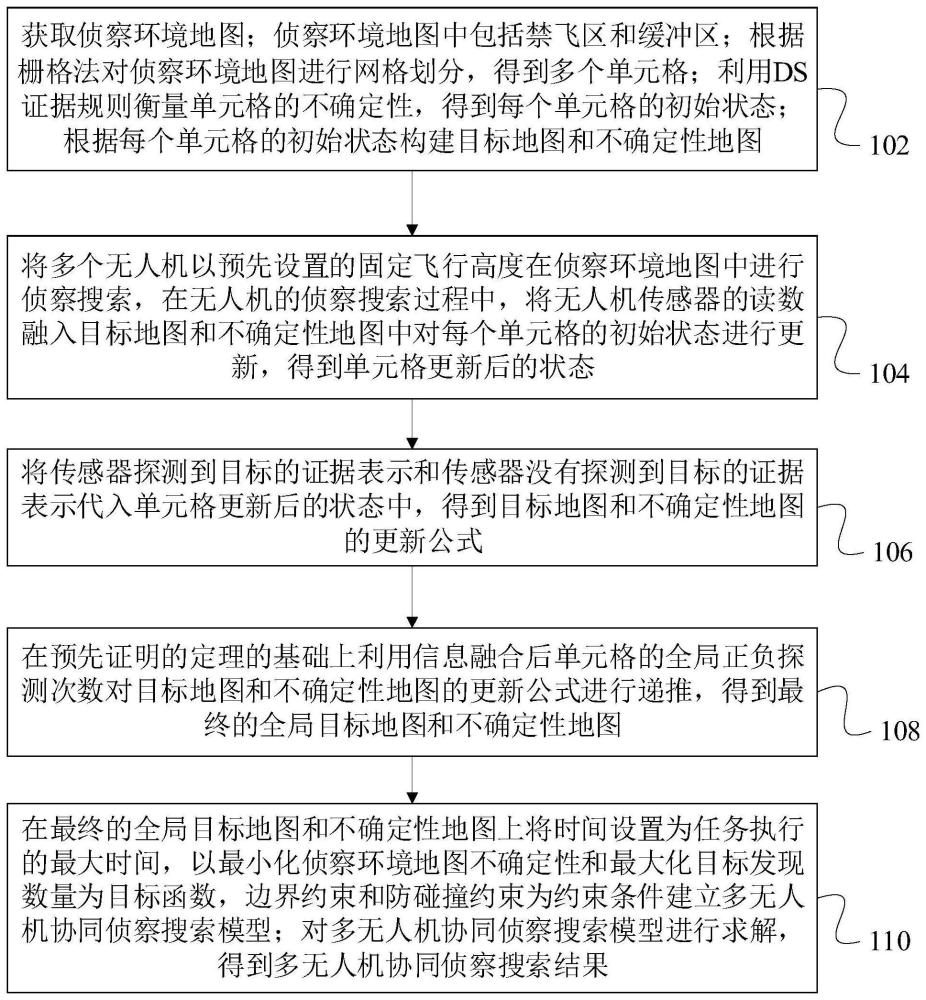
3、获取侦察环境地图;侦察环境地图中包括禁飞区和缓冲区;根据栅格法对侦察环境地图进行网格划分,得到多个单元格;利用ds证据规则衡量单元格的不确定性,得到每个单元格的初始状态;根据每个单元格的初始状态构建目标地图和不确定性地图;
4、将多个无人机以预先设置的固定飞行高度在侦察环境地图中进行侦察搜索,在无人机的侦察搜索过程中,将无人机传感器的读数融入目标地图和不确定性地图中对每个单元格的初始状态进行更新,得到单元格更新后的状态;
5、将传感器探测到目标的证据表示和传感器没有探测到目标的证据表示代入单元格更新后的状态中,得到目标地图和不确定性地图的更新公式;
6、在预先证明的定理的基础上利用信息融合后单元格的全局正负探测次数对目标地图和不确定性地图的更新公式进行递推,得到最终的全局目标地图和不确定性地图;
7、在最终的全局目标地图和不确定性地图上将时间设置为任务执行的最大时间,以最小化侦察环境地图不确定性和最大化目标发现数量为目标函数,边界约束和防碰撞约束为约束条件建立多无人机协同侦察搜索模型;对多无人机协同侦察搜索模型进行求解,得到多无人机协同侦察搜索结果。
8、在其中一个实施例中,利用ds证据规则衡量单元格的不确定性,得到每个单元格的初始状态,包括:
9、根据ds证据规则,定义辨别域θ为θ={e,f},集合θ的所有子集表示为识别框架λ,λ=2θ={φ,e,f,u},其中θ是空集,u={e,f}表示不确定状态;f表示在cx,y中探测到目标,e表示没有在cx,y中探测到目标,对于识别框架中的每一个子集,都按照基本概率分配一个概率,分配函数记为m,故单元格cx,y的初始状态通过基本概率分配表示为
10、mx,y(φ)=0
11、
12、其中,mx,y(f)和mx,y(e)是目标地图,用于存储目标信息,分别表征cx,y存在目标的可能性和不存在目标的可能性,mx,y(u)是不确定性地图,用于存储不确定性信息,表征cx,y的不确定度,x,y表示单元格的坐标。
13、在其中一个实施例中,将无人机传感器的读数融入目标地图和不确定性地图中对每个单元格的初始状态进行更新,得到单元格更新后的状态,包括:
14、将无人机传感器的读数融入目标地图和不确定性地图中对每个单元格的初始状态进行更新,得到单元格更新后的状态为
15、
16、
17、
18、其中,mb表示传感器证据的基本概率分配,传感器的读数是每个单元格状态的证据来源,mx,y(f)和mx,y(e)是目标地图,mx,y(u)是不确定性地图。
19、在其中一个实施例中,传感器探测到目标的证据表示为
20、
21、传感器没有探测到目标的证据表示为
22、
23、其中,mf表示传感器发现目标的置信度,me表示传感器没有发现目标的置信度。
24、在其中一个实施例中,将传感器探测到目标的证据表示和传感器没有探测到目标的证据表示代入单元格更新后的状态中,得到目标地图和不确定性地图的更新公式,包括:
25、将记为将传感器探测到目标的证据表示和传感器没有探测到目标的证据表示代入单元格更新后的状态中,得到目标地图和不确定性地图的更新公式为
26、
27、
28、
29、其中,表示对单元格cx,y的探测结果,f表示在cx,y中探测到目标,e表示没有在cx,y中探测到目标,mf表示传感器发现目标的置信度,me表示传感器没有发现目标的置信度,t表示当前时刻,x,y表示单元格的坐标。
30、在其中一个实施例中,信息融合后单元格的全局正负探测次数为
31、
32、其中,表示正探测次数,表示负探测次数,i表示无人机序号,u表示无人机集群,t表示当前时刻,x,y表示单元格的坐标。
33、在其中一个实施例中,在预先证明的定理的基础上利用信息融合后单元格的全局正负探测次数对目标地图和不确定性地图的更新公式进行递推,得到最终的全局目标地图和不确定性地图,包括:
34、记其中,x,y表示单元格的坐标,t表示当前时刻,mf表示传感器发现目标的置信度,me表示传感器没有发现目标的置信度,表示对单元格cx,y的探测结果,f表示在cx,y中探测到目标,表示正探测次数,表示负探测次数,e表示没有在cx,y中探测到目标,在初始化的条件下,
35、由于全局目标地图mx,y(f),mx,y(e)和不确定性地图mx,y(u)在t时刻的最终状态仅与任务时间内该单元格的正负探测次数有关,利用信息融合后单元格的全局正负探测次数对目标地图和不确定性地图的更新公式进行递推,得到最终的全局目标地图和不确定性地图为
36、
37、在其中一个实施例中,在最终的全局目标地图和不确定性地图上将时间设置为任务执行的最大时间,以最小化侦察环境地图不确定性和最大化目标发现数量为目标函数,边界约束和防碰撞约束为约束条件建立多无人机协同侦察搜索模型,包括:
38、在最终的全局目标地图和不确定性地图上将时间设置为任务执行的最大时间,以最小化侦察环境地图不确定性和最大化目标发现数量为目标函数,边界约束和防碰撞约束为约束条件建立多无人机协同侦察搜索模型为
39、
40、其中,f1表示侦察环境地图不确定性,f2表示目标发现数量,t是任务执行的最大时间,τ表示认为目标存在的阈值,当时,就认为该单元格存在目标,lx表示环境地图x轴方向的单元格数量,ly表示y轴方向的单元格数量,ui,t表示无人机i在时刻t的位置,zk表示禁飞区k的位置,dz表示禁飞区半径,dsafe表示无人机之间防碰撞的安全距离,uj,t表示无人机j在时刻t的位置,nz表示侦察环境地图中禁飞区的数量,k表示第k个禁飞区。
41、在其中一个实施例中,预先证明的定理为目标地图和不确定性地图在任意时刻的最终状态仅与任务时间内该单元格的正负探测次数有关;证明过程包括:
42、引理1:交换相邻两次探测结果的顺序不影响目标地图和不确定性地图的最终状态,当单元格cx,y没有被任何无人机侦察时,其状态信息不会发生改变;
43、当t时刻无人机i在cx,y侦察到目标,即t+1时刻无人机i在cx,y没有侦察到目标,即这种情况下cx,y的不确定性地图表示为
44、
45、当t时刻无人机i在cx,y没有侦察到目标,即t+1时刻无人机i在cx,y侦察到目标,即这种情况下cx,y的不确定性地图表示为
46、
47、则即交换相邻两次探测结果的顺序不影响不确定性地图的最终状态,同理可证交换相邻两次探测结果的顺序不影响目标地图的状态,因此引理1得证;
48、公理1:任意一个排列都可以通过有限次交换相邻元素的操作得到;
49、根据引理1和公理1,定理得到证明。
50、一种基于信息融合的多无人机协同侦察搜索装置,所述装置包括:
51、构建目标地图和不确定性地图模块,用于获取侦察环境地图;侦察环境地图中包括禁飞区和缓冲区;根据栅格法对侦察环境地图进行网格划分,得到多个单元格;利用ds证据规则衡量单元格的不确定性,得到每个单元格的初始状态;根据每个单元格的初始状态构建目标地图和不确定性地图;
52、单元格更新模块,用于将多个无人机以预先设置的固定飞行高度在侦察环境地图中进行侦察搜索,在无人机的侦察搜索过程中,将无人机传感器的读数融入目标地图和不确定性地图中对每个单元格的初始状态进行更新,得到单元格更新后的状态;
53、目标地图和不确定性地图的更新模块,用于将传感器探测到目标的证据表示和传感器没有探测到目标的证据表示代入单元格更新后的状态中,得到目标地图和不确定性地图的更新公式;
54、信息融合模块,用于在预先证明的定理的基础上利用信息融合后单元格的全局正负探测次数对目标地图和不确定性地图的更新公式进行递推,得到最终的全局目标地图和不确定性地图;
55、多无人机协同侦察搜索模块,用于在最终的全局目标地图和不确定性地图上将时间设置为任务执行的最大时间,以最小化侦察环境地图不确定性和最大化目标发现数量为目标函数,边界约束和防碰撞约束为约束条件建立多无人机协同侦察搜索模型;对多无人机协同侦察搜索模型进行求解,得到多无人机协同侦察搜索结果。
56、上述基于信息融合的多无人机协同侦察搜索方法及装置,首先利用ds证据规则衡量单元格的不确定性,得到每个单元格的初始状态;根据每个单元格的初始状态构建目标地图和不确定性地图,在无人机的侦察搜索过程中,将无人机传感器的读数融入目标地图和不确定性地图中对每个单元格的初始状态进行更新,传感器的读数是每个单元格状态的证据来源,将其融合到目标地图中以更新地图和不确定性地图,通过不断更新目标地图和不确定性地图来减少单元的不确定性,从而提高目标地图和不确定地图的准确率,进而提高多无人多无人机协同侦察搜索的准确率。然后将传感器探测到目标的证据表示和传感器没有探测到目标的证据表示代入单元格更新后的状态中,得到目标地图和不确定性地图的更新公式,无人机的传感器证据被逐渐融合到目标地图和不确定性地图中,目标地图和不确定性地图可以有效地表示侦察环境地图中目标的存在状态和单元格的不确定性状态,通过将信息融合后单元格的全局正负探测次数对目标地图和不确定性地图的更新公式进行递推每架无人机共享自己的目标地图和不确定性地图进行信息融合,得到全局目标地图和不确定性地图,融合后的全局地图可以帮助无人机在不断搜索的过程中获得更加精确的目标分布信息,同时不断进行更新来获取最新的信息,进而提高协同侦察搜索的准确率,最后通过在最终的全局目标地图和不确定性地图上将时间设置为任务执行的最大时间,以最小化侦察环境地图不确定性和最大化目标发现数量为目标函数,边界约束和防碰撞约束为约束条件建立多无人机协同侦察搜索模型可以提高全局覆盖率,降低不确定度通过能够发现更多的目标,提高侦察搜索准确率。
- 还没有人留言评论。精彩留言会获得点赞!