一种自动巡检机器人的制作方法
本技术涉及自动巡检,尤其涉及一种自动巡检机器人。
背景技术:
1、在边防、园区及校园等都有安全监控的需要,目前大多采用固定摄像头或者人工巡检两种方式,其主要存在以下的问题:
2、固定摄像头的巡检在部署上有一定要求,不适合边境线、野外或者大范围无电力供应的场地,固定摄像头的监控方式大概率存在监控盲区,再者固定摄像头容易遭到破坏导致无法正常安全监控。
3、人工巡检在寒冷或者酷暑地区给人工带来巨大挑战,且巡检效率低。
4、因此,现有技术有待改进。
技术实现思路
1、鉴于上述现有技术的不足之处,本实用新型的目的在于提供一种自动巡检机器人,旨在实现无人驾驶自动巡检,无需固定安装布线,无需人工巡检而节省人力。
2、为实现上述目的,本实用新型采取了以下技术方案:
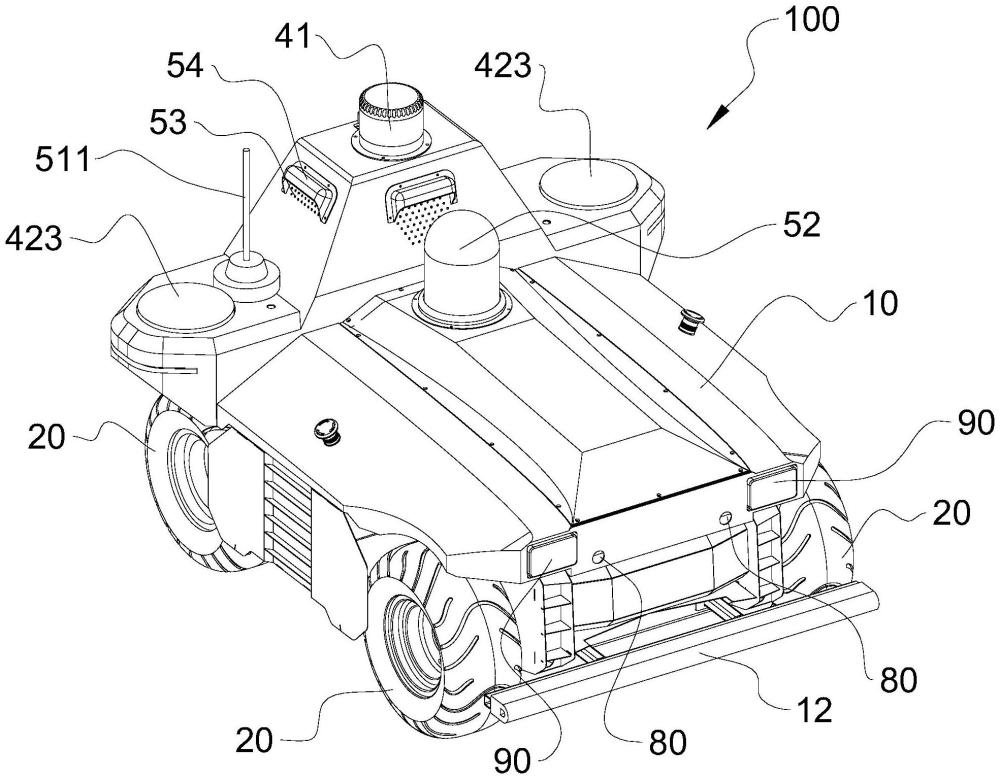
3、一种自动巡检机器人,包括车体及安装在车体下的车轮,其中:
4、所述车体上设置有无人驾驶控制单元、导航单元,监控单元及行走驱动单元;
5、所述无人驾驶控制单元用于所述自动巡检机器人的无人驾驶控制;
6、所述导航单元包括设置在车体上的三维激光雷达及rtk定位器,所述三维激光雷达及rtk定位器结合实现无人驾驶时的定位导航;
7、所述监控单元包括设置在车体上的无线通讯模块及可转动的云台摄像头;
8、所述行走驱动单元包括传动机构、行走驱动控制板、与所述行走驱动控制板电连接的电机、电池,所述传动机构与所述电机、车轮传动连接;
9、所述行走驱动控制板、电池、三维激光雷达、rtk定位器、无线通讯模块、云台摄像头均与所述无人驾驶控制单元电连接。
10、其中,所述无人驾驶控制单元包括一安装有无人驾驶系统的车载电脑。
11、其中,所述rtk定位器包括定位器主板、与所述定位器主板电连接的定位信号接收模块、与所述定位信号接收模块电连接的两个隐藏式安装的差分天线。
12、其中,所述车体的后端左右两侧对称设置有安装座,所述安装座开设有上端开口的腔体,所述腔体的腔壁上设置有磁吸件,所述差分天线装入所述腔体内并与所述腔壁磁吸连接。
13、其中,所述定位信号接收模块为4g通信模块。
14、其中,所述车体前后设置有避障超声波传感器。
15、其中,所述车体前后设置有led照明灯。
16、其中,所述监控单元还包括在所述车体上设置的语音喇叭及麦克风。
17、其中,所述车体前端设置有防撞条。
18、其中,所述云台摄像头可在水平及垂直方向转动;和/或,
19、所述车轮前后设置有四个,所述四个车轮采用四轮全驱差速驱动。
20、应理解,在本实用新型范围内中,本实用新型的上述各技术特征和在下文(如实施方式)中具体描述的各技术特征之间都可以互相组合,从而构成新的或优选的技术方案,限于篇幅,在此不再一一累述。
21、本实用新型的有益效果:
22、1、采用具有无人驾驶控制单元的机器人进行自动巡检,无需人工巡检,节省人力。
23、2、可以移动,相对于与固定摄像头具有更大的视野范围。
24、3、图像数据等通过监控单元的无线通讯模块无线传输到后台,巡检现场无需布线及安装。
25、4、采用三维激光雷达与rtk-gps定位相融合的定位导航方式,能实现更精确的导航定位,同时也能实现室内室外全地区的定位方式。
技术特征:
1.一种自动巡检机器人,包括车体及安装在车体下的车轮,其特征在于:
2.根据权利要求1所述的自动巡检机器人,其特征在于,所述无人驾驶控制单元包括一安装有无人驾驶系统的车载电脑。
3.根据权利要求1所述的自动巡检机器人,其特征在于,所述rtk定位器包括定位器主板、与所述定位器主板电连接的定位信号接收模块、与所述定位信号接收模块电连接的两个隐藏式安装的差分天线。
4.根据权利要求3所述的自动巡检机器人,其特征在于,所述车体的后端左右两侧对称设置有安装座,所述安装座开设有上端开口的腔体,所述腔体的腔壁上设置有磁吸件,所述差分天线装入所述腔体内并与所述腔壁磁吸连接。
5.根据权利要求3所述的自动巡检机器人,其特征在于,所述定位信号接收模块为4g通信模块。
6.根据权利要求1所述的自动巡检机器人,其特征在于,所述车体前后设置有避障超声波传感器。
7.根据权利要求1所述的自动巡检机器人,其特征在于,所述车体前后设置有led照明灯。
8.根据权利要求1所述的自动巡检机器人,其特征在于,所述监控单元还包括在所述车体上设置的语音喇叭及麦克风。
9.根据权利要求1所述的自动巡检机器人,其特征在于,所述车体前端设置有防撞条。
10.根据权利要求1所述的自动巡检机器人,其特征在于,所述云台摄像头可在水平及垂直方向转动;
技术总结
本技术公开了一种自动巡检机器人,包括车体及安装在车体下的车轮,所述车体上设置有无人驾驶控制单元、导航单元,监控单元及行走驱动单元;所述无人驾驶控制单元用于所述自动巡检机器人的无人驾驶控制;所述导航单元包括设置在车体上的三维激光雷达及RTK定位器,所述三维激光雷达及RTK定位器结合实现无人驾驶时的定位导航;所述监控单元包括设置在车体上的无线通讯模块及可转动的云台摄像头;所述行走驱动单元包括传动机构、行走驱动控制板、与所述行走驱动控制板电连接的电机、电池,所述传动机构与所述电机、车轮传动连接。本技术实现无人驾驶自动巡检,无需固定安装布线,无需人工巡检而节省人力。
技术研发人员:曹博
受保护的技术使用者:深圳前海格致科技有限公司
技术研发日:20230905
技术公布日:2024/3/27
- 还没有人留言评论。精彩留言会获得点赞!