一种用于割草机器人的割草方法与流程
本发明属于割草机器人,特别是一种用于割草机器人的割草方法。
背景技术:
1、随着新技术的应用使得割草机器人技术日益智能化,智能割草机器人取代传统割草机器人已成趋势。但目前割草机器人的智能程度还很低,无法及时进行草坪状况的检测。为了提高割草效率,割草过程中,割草机器人根据草密度调节运行速度进行割草,在草稠密程度小的场景工作时,割草机器人需要加快前进速度,在不漏割基础上提高工作效率,降低电池消耗。在草茂盛的场景工作时,割草机器人需要降低前进速度,降低割草电机转速,既可以提高前进过程的稳定性,又可以避免割草机器人漏割和电机卡死,但由于系统响应滞后,前进速度发生改变,割草机器人从草稀疏区域进入草茂盛区域时,存在一定范围的漏割,无法及时消除。
技术实现思路
1、本发明的目的在于提供一种用于割草机器人的割草方法,割草机器人在草坪工作区域进行割草,采集割草电机电流、电压、功率等电学参数,实时反馈草地状况,在割草机器人从草稀疏区域进入草茂盛区域时,利用割草机器人旋转割草,及时消除由于草况变化,运行速度改变导致出现的漏割区,进而指导割草机器人路径规划,减少漏割,实现割草效率的最大化。
2、实现本发明目的的技术解决方案为:
3、一种用于割草机器人的割草方法,割草机器人以初始速度v0在轻载区域进行正常割草作业,割草机器人实时采集割草电机运行电学参数,并将采集的电学参数与阈值参数进行比较,当所述的割草电机的运行电学参数从超过阈值参数开始,记录起始时间t0,并持续δt时间,记录当前时间t1,其中δt=t1-t0,则判定当前位置草比较茂盛,割草机器人已进入重载区域,此时割草机器人停止前进,并原地旋转一圈,旋转过程中,割草电机处于工作状态,旋转结束后,割草机器人朝着之前前进方向,以速度v1在重载区域内继续进行割草工作,其中v0大于v1。
4、进一步地,所述电学参数包括电流、电压、功率。
5、进一步地,所述电学参数为割草电机工作电流。
6、进一步地,割草电机mcu实时检测割草电机采样电阻上的电压,并进行均值滤波处理,得到当前的割草电机工作电流it。
7、进一步地,阈值电流i0为6a。
8、进一步地,v0为0.5m/s,v1为0.2m/s,δt为0.5s。
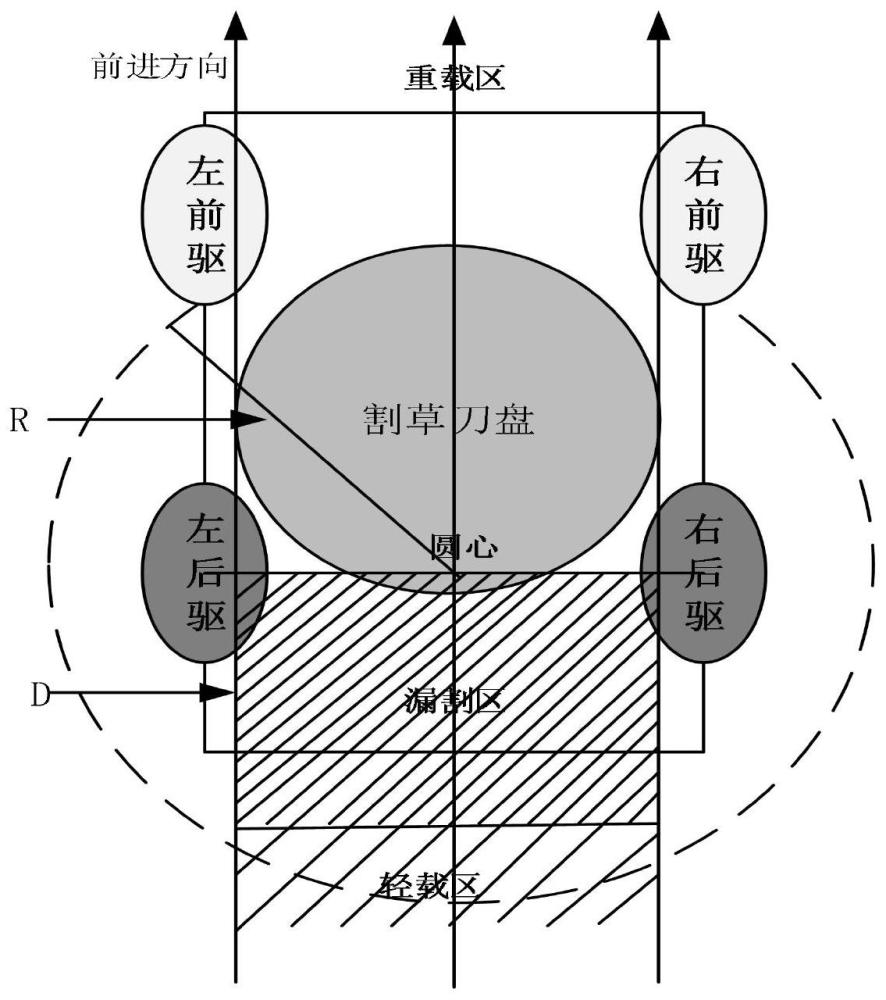
9、进一步地,割草机器人包括四轮行走电机,停止前进后,以两个后驱轮子之间的中心位置为圆心,原地旋转360度,旋转过程中,利用割草电机刀盘进行圆环割草,消除漏割区。
10、进一步地,漏割区长度d=v0*(δt+t),t为系统交互响应时间,割草机器人旋转的圆半径r大于d。
11、进一步地,割草机器人在重载区域内以速度v1进行重载割草作业,采集割草电机运行电学参数,并将采集的电学参数与阈值参数进行比较,当所述的割草电机的运行电学参数从低于阈值参数开始,记录起始时间t2,并持续δt时间,记录当前时间t3,其中δt=t3-t2,则判定当前位置草比较稀疏,割草机器人已走出重载区域,进入低载区域,割草机器人将运行速度从v1提高到v0,割草机器人以速度v0在轻载区域内继续进行割草工作。
12、与现有技术相比,其显著优点在于:
13、本发明通过割草电机的电机运行电学参数大小判断当前位置的草坪状况,通过原地旋转割草方式,及时消除系统响应时间滞后造成的漏割区,从而指导路径规划,避免无效的工作过程,提高工作效率。
技术特征:
1.一种用于割草机器人的割草方法,其特征在于,
2.根据权利要求1所述的用于割草机器人的割草方法,其特征在于,所述电学参数包括电流、电压、功率。
3.根据权利要求1所述的用于割草机器人的割草方法,其特征在于,所述电学参数为割草电机工作电流。
4.根据权利要求3所述的用于割草机器人的割草方法,其特征在于,割草电机mcu实时检测割草电机采样电阻上的电压,并进行均值滤波处理,得到当前的割草电机工作电流it。
5.根据权利要求3所述的用于割草机器人的割草方法,其特征在于,阈值电流i0为6a。
6.根据权利要求5所述的用于割草机器人的割草方法,其特征在于,v0为0.5m/s,v1为0.2m/s,δt为0.5s。
7.根据权利要求1-6任一项所述的用于割草机器人的割草方法,其特征在于,割草机器人包括四轮行走电机,停止前进后,以两个后驱轮子之间的中心位置为圆心,原地旋转360度,旋转过程中,利用割草电机刀盘进行圆环割草,消除漏割区。
8.根据权利要求7所述的用于割草机器人的割草方法,其特征在于,漏割区长度d=v0*(δt+t),t为系统交互响应时间,割草机器人旋转的圆半径r大于d。
9.根据权利要求7所述的用于割草机器人的割草方法,其特征在于,割草机器人在重载区域内以速度v1进行重载割草作业,采集割草电机运行电学参数,并将采集的电学参数与阈值参数进行比较,当所述的割草电机的运行电学参数从低于阈值参数开始,记录起始时间t2,并持续δt时间,记录当前时间t3,其中
技术总结
本发明提供了一种用于割草机器人的割草方法,割草机器人以初始速度V0在轻载区域进行正常割草作业,割草机器人实时采集割草电机运行电学参数,并将采集的电学参数与阈值参数进行比较,当割草电机的运行电学参数从超过阈值参数开始并持续ΔT时间,则判定当前割草机器人已进入重载区域,此时割草机器人停止前进,并原地旋转一圈,旋转过程中,割草电机处于工作状态,旋转结束后,割草机器人朝着之前前进方向,以速度V1在重载区域内继续进行割草工作,其中V0大于V1。本发明通过割草电机的电机运行电学参数大小判断当前位置的草坪状况,通过原地旋转割草方式,及时消除系统响应时间滞后造成的漏割区,从而指导路径规划,避免无效的工作过程,提高工作效率。
技术研发人员:丁广华,刘楷
受保护的技术使用者:南京苏美达智能技术有限公司
技术研发日:
技术公布日:2024/3/27
- 还没有人留言评论。精彩留言会获得点赞!