异常巡检方法、装置、设备及存储介质与流程
本技术涉及通信,尤其涉及一种异常巡检方法、装置、设备及存储介质。
背景技术:
1、无人机巡检是指无人机基于飞行航线对各种设备、建筑物、道路、桥梁、管道进行巡查,以发现潜在的问题并及时进行处理,从而可以保障设备和设施的安全和正常运行。现有技术通常模拟精确的地形环境,并结合无人机飞行路径长度、飞行高度确定飞行航线。
2、但是,现有技术通常由一个无人机巡检一个区域,在多个区域的交界处出现设备或设施异常时,可能会出现无人机跨区域进行异常信息排查,导致与其他区域的无人机相撞的情况。
技术实现思路
1、本技术提供一种异常巡检方法、装置、设备及存储介质,以至少解决现有技术在多个区域的交界处出现设备或设施异常时,可能会出现无人机跨区域进行异常信息排查,导致与其他区域的无人机相撞的问题。本技术的技术方案如下:
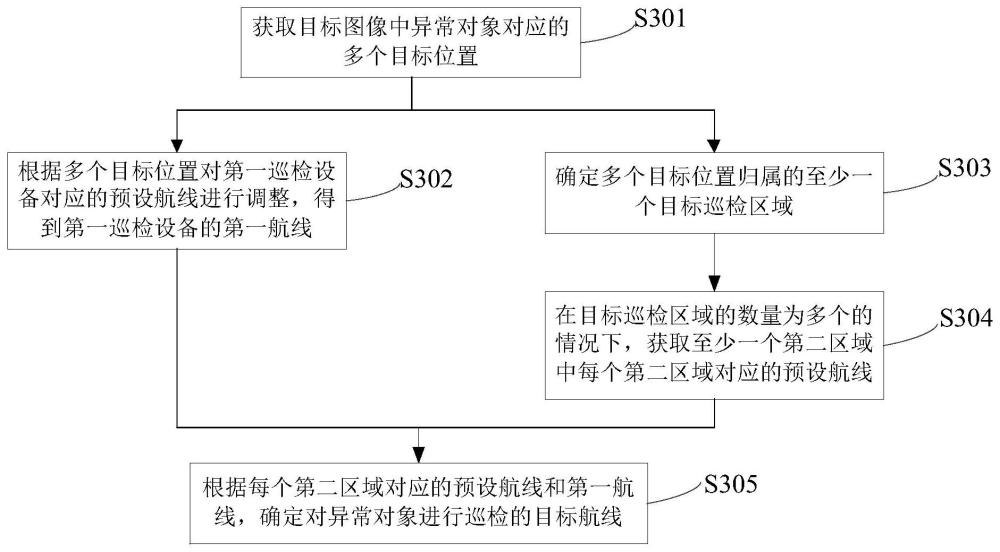
2、第一方面,提供一种异常巡检方法,该方法包括:获取目标图像中异常对象对应的多个目标位置。目标图像为第一巡检设备巡检第一区域得到的,第一区域为第一巡检设备按照第一巡检设备对应的预设航线巡检的区域。根据多个目标位置对第一巡检设备对应的预设航线进行调整,得到第一巡检设备的第一航线。确定多个目标位置归属的至少一个目标巡检区域。在目标巡检区域的数量为多个的情况下,获取至少一个第二区域中每个第二区域对应的预设航线。第二区域为多个目标巡检区域中除第一区域之外的目标巡检区域。根据每个第二区域对应的预设航线和第一航线,确定对异常对象进行巡检的目标航线。目标航线与每个第二区域对应的预设航线在同一时间段内不相交,或者目标航线对应的巡检设备未跨区域进行巡检。
3、在一种可能的实施方式中,上述根据每个第二区域对应的预设航线和第一航线,确定对异常对象进行巡检的目标航线,包括:根据每个第二区域对应的预设航线,确定每个第二区域对应的巡检设备按照每个第二区域对应的预设航线巡检异常对象的第一时刻,得到每个第二区域对应的第一时刻。确定每个第二区域中的第一位置。第一位置为每个第二区域中的目标位置。根据第一航线,确定第一巡检设备巡检每个第二区域中的第一位置的第二时刻,得到每个第二区域对应的第二时刻。确定每个第二区域对应的第一时刻与每个第二区域对应的第二时刻之间的时长,得到每个第二区域对应的时长。根据每个第二区域对应的时长,确定对异常对象进行巡检的目标航线。
4、在一种可能的实施方式中,上述根据每个第二区域对应的时长,确定对异常对象进行巡检的目标航线,包括:在每个第二区域对应的时长大于预设时长的情况下,将第一航线确定为目标航线。在至少一个第二区域中存在第二区域对应的时长小于或等于预设时长的情况下,根据每个第二区域中的第一位置,确定每个第二区域对应的第二航线。根据多个目标位置中归属于第一区域的目标位置,确定第三航线。将每个第二区域对应的第二航线和第三航线,确定为目标航线。
5、在一种可能的实施方式中,上述确定每个第二区域中的第一位置,包括:根据多个目标位置和每个第二区域,将归属于每个第二区域的目标位置,确定为每个第二区域中的第二位置。在每个第二区域中的第二位置的数量为一个的情况下,将每个第二区域中的第二位置,确定为每个第二区域中的第一位置。在每个第二区域中的第二位置的数量为多个的情况下,将多个第二位置中的任意一个第二位置,确定为每个第二区域中的第一位置。
6、在一种可能的实施方式中,上述获取目标图像中异常对象对应的多个目标位置,包括:根据预设分类算法对目标图像进行背景去除处理,得到第一图像。根据第一图像和多个预设图像,判断第一图像中的对象是否处于异常状态。预设图像包括:对象处于正常状态的图像,和/或,对象处于异常状态的图像。在第一图像中的对象处于异常状态的情况下,将第一图像中的对象确定为异常对象。将第一图像进行坐标转换处理,得到异常对象对应的多个第三位置。将多个第三位置进行边缘提取处理,得到异常对象对应的多个目标位置。
7、在一种可能的实施方式中,上述方法还包括:在目标巡检区域的数量为一个的情况下,将第一航线确定为目标航线。
8、第二方面,提供一种异常巡检装置,该异常巡检装置包括:获取单元、处理单元和确定单元。获取单元,用于获取目标图像中异常对象对应的多个目标位置。目标图像为第一巡检设备巡检第一区域得到的,第一区域为第一巡检设备按照第一巡检设备对应的预设航线巡检的区域。处理单元,用于根据多个目标位置对第一巡检设备对应的预设航线进行调整,得到第一巡检设备的第一航线。确定单元,用于确定多个目标位置归属的至少一个目标巡检区域。获取单元,还用于在目标巡检区域的数量为多个的情况下,获取至少一个第二区域中每个第二区域对应的预设航线。第二区域为多个目标巡检区域中除第一区域之外的目标巡检区域。确定单元,还用于根据每个第二区域对应的预设航线和第一航线,确定对异常对象进行巡检的目标航线。目标航线与每个第二区域对应的预设航线在同一时间段内不相交,或者目标航线对应的巡检设备未跨区域进行巡检。
9、在一种可能的实施方式中,上述确定单元,具体用于:根据每个第二区域对应的预设航线,确定每个第二区域对应的巡检设备按照每个第二区域对应的预设航线巡检异常对象的第一时刻,得到每个第二区域对应的第一时刻。确定每个第二区域中的第一位置。第一位置为每个第二区域中的目标位置。根据第一航线,确定第一巡检设备巡检每个第二区域中的第一位置的第二时刻,得到每个第二区域对应的第二时刻。确定每个第二区域对应的第一时刻与每个第二区域对应的第二时刻之间的时长,得到每个第二区域对应的时长。根据每个第二区域对应的时长,确定对异常对象进行巡检的目标航线。
10、在一种可能的实施方式中,上述确定单元,具体用于:在每个第二区域对应的时长大于预设时长的情况下,将第一航线确定为目标航线。在至少一个第二区域中存在第二区域对应的时长小于或等于预设时长的情况下,根据每个第二区域中的第一位置,确定每个第二区域对应的第二航线。根据多个目标位置中归属于第一区域的目标位置,确定第三航线。将每个第二区域对应的第二航线和第三航线,确定为目标航线。
11、在一种可能的实施方式中,上述确定单元,具体用于:根据多个目标位置和每个第二区域,将归属于每个第二区域的目标位置,确定为每个第二区域中的第二位置。在每个第二区域中的第二位置的数量为一个的情况下,将每个第二区域中的第二位置,确定为每个第二区域中的第一位置。在每个第二区域中的第二位置的数量为多个的情况下,将多个第二位置中的任意一个第二位置,确定为每个第二区域中的第一位置。
12、在一种可能的实施方式中,上述获取单元,具体用于:根据预设分类算法对目标图像进行背景去除处理,得到第一图像。根据第一图像和多个预设图像,判断第一图像中的对象是否处于异常状态。预设图像包括:对象处于正常状态的图像,和/或,对象处于异常状态的图像。在第一图像中的对象处于异常状态的情况下,将第一图像中的对象确定为异常对象。将第一图像进行坐标转换处理,得到异常对象对应的多个第三位置。将多个第三位置进行边缘提取处理,得到异常对象对应的多个目标位置。
13、在一种可能的实施方式中,上述确定单元,还用于:在目标巡检区域的数量为一个的情况下,将第一航线确定为目标航线。
14、第三方面,提供一种电子设备,包括:处理器。用于存储处理器可执行指令的存储器。其中,处理器被配置为执行指令,以实现上述第一方面及其任一种可能的实施方式的方法。
15、第四方面,提供一种计算机可读存储介质,当计算机可读存储介质中的指令由电子设备的处理器执行时,使得电子设备能够执行上述第一方面中及其任一种可能的实施方式的方法。
16、第五方面,提供一种计算机程序产品,计算机程序产品包括计算机指令,当计算机指令在电子设备上运行时,使得电子设备执行上述第一方面及其任一种可能的实施方式的方法。
17、本技术提供的第一方面的技术方案至少带来以下有益效果:现有技术在多个区域的交界处出现设备或设施异常时,可能会出现无人机跨区域进行异常信息排查,导致与其他区域的无人机相撞的情况。本技术获取目标图像中异常对象对应的多个目标位置。其中,目标图像为第一巡检设备巡检第一区域得到的,第一区域为第一巡检设备按照第一巡检设备对应的预设航线巡检的区域。之后,根据多个目标位置对第一巡检设备对应的预设航线进行调整,得到第一巡检设备的第一航线。
18、接着,确定多个目标位置归属的至少一个目标巡检区域。然后,在目标巡检区域的数量为多个的情况下,获取至少一个第二区域中每个第二区域对应的预设航线。其中,第二区域为多个目标巡检区域中除第一区域之外的目标巡检区域。这样,可以确定目标对象位于多个巡检区域的交界处。进一步的,根据每个第二区域对应的预设航线和第一航线,确定对异常对象进行巡检的目标航线。其中,目标航线与每个第二区域对应的预设航线在同一时间段内不相交,或者目标航线对应的巡检设备未跨区域进行巡检。这样,确定到的目标航线可以有效避免巡检设备相撞的情况。
19、需要说明的是,第二方面至第五方面中的任一种实现方式所带来的技术效果可参见第一方面中对应实现方式所带来的技术效果,此处不再赘述。
20、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本技术。
- 还没有人留言评论。精彩留言会获得点赞!