飞行器水面倾覆回正方法及回正控制系统与流程
本发明涉及飞行器倾覆回正,尤其涉及飞行器水面倾覆回正方法及水面倾覆回正控制系统。
背景技术:
1、水空跨介质飞行器是一种可以在水中航行和空中飞行并能自由实现水空介质跨越的新概念航行器。跨介质飞行器结合了无人机的高机动性和水下航行器的高隐蔽性,具备传统无人机无法比拟的优势。跨介质飞行器可应用于海上搜救、水质检测、水下生物观测、气象预报和特殊任务执行等使命。目前,较为典型的跨介质飞行器主要有固定翼跨介质飞行器、多旋翼跨介质飞行器和复合翼跨介质飞行器三类。而多旋翼跨介质飞行器和复合翼跨介质飞行器均是通过旋翼实现水上起飞和水面降落。然而,跨介质飞行器在漂浮或者起降阶段,受风、浪、流的影响,可能失去平衡并导致倾覆。在倾覆状态下,旋翼通常浸没在水下,难以实现起飞或者姿态调整,容易导致飞行器抛锚。现有的飞行器翻转控制是通过特殊的中间过程点,飞行器要先经过过程点后再回到初始位置,同时姿态与初始姿态相同,不能实现180°的回转。
技术实现思路
1、为解决上述的技术问题,本发明提供一种飞行器水面倾覆回正方法以及水面倾覆回正控制系统。
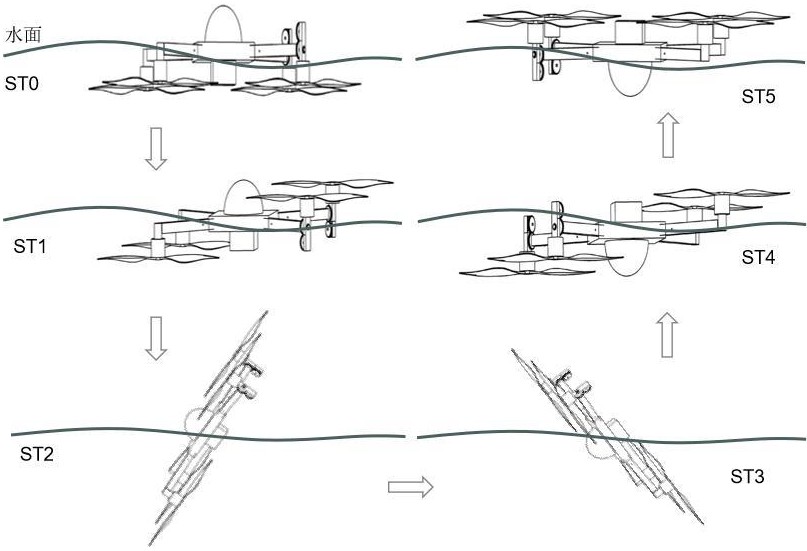
2、第一方面,本发明提供一种飞行器水面倾覆回正方法,包括:提供位于飞行器的回正翻转轴同侧的至少一对可倾转旋翼;第一次驱动至少一对可倾转旋翼从水面下方倾转至水面上方;驱动水面上方的至少一对可倾转旋翼朝相反的方向旋转;调控水面上方的至少一对可倾转旋翼旋转时对飞行器的机体产生的力矩,使机体绕回正翻转轴从倾覆状态翻转至回正状态;以及在机体从倾覆状态翻转至回正状态之后,第二次驱动至少一对可倾转旋翼从水面下方倾转至水面上方。其中,飞行器为水上旋翼无人机、旋翼跨介质飞行器或复合翼跨介质飞行器。
3、在一些实施例中,力矩的调控方法包括:通过调节水面上方的至少一对可倾转旋翼的旋转速度来调节力矩的大小。可选地,力矩的调控方法包括:通过调节水面上方的至少一对可倾转旋翼的旋转速度以及调节水面下方的其它旋翼的旋转速度来调节力矩的大小。
4、具体地,可倾转旋翼的数量为一对或两对。力矩的调控方法包括:对飞行器的姿态建立运动学模型和动力学模型;获取飞行器的实际姿态,计算机体的姿态误差;和基于运动学模型和动力学模型以及机体的姿态误差,通过非线性控制方法获得参考力矩的大小,调节一对或两对可倾转旋翼旋转时对飞行器的机体产生的力矩为参考力矩,以控制飞行器的实际姿态在有限时间内到达期望姿态。其中,期望姿态为飞行器的机体处于回正状态时的姿态。
5、优选地,采用四元数方法对飞行器的姿态建立运动学模型和动力学模型;如果飞行器为水上旋翼无人机或旋翼跨介质飞行器,回正翻转轴的方向为飞行器体坐标系的y方向或x方向;如果飞行器为复合翼跨介质飞行器,回正翻转轴的方向为飞行器体坐标系的y方向。
6、优选地,飞行器为四旋翼水上或跨介质飞行器,可倾转旋翼的数量为两个,非线性控制方法采用基于趋近律的滑模控制法。
7、具体地,飞行器的姿态参数包括俯仰角θ、偏航角ψ和横滚角φ;飞行器的机体处于倾覆状态时,俯仰角θ=0°,偏航角ψ=0°,横滚角φ=0°;飞行器的机体处于回正状态时,俯仰角θ=180°,偏航角ψ=0°,横滚角φ=0°。
8、另一方面,本发明提供一种飞行器水面倾覆回正控制系统,飞行器为水上飞行器或跨介质飞行器,飞行器包括位于飞行器的回正翻转轴同侧的至少一对可倾转旋翼;控制系统包括旋翼倾转驱动模块、旋翼旋转驱动模块和力矩调控模块。旋翼倾转驱动模块被配置成驱动同侧的至少一对可倾转旋翼从水面下方倾转至水面上方。旋翼旋转驱动模块被配置成驱动同侧的至少一对可倾转旋翼朝相反的方向旋转,从而对处于倾覆状态的飞行器的机体产生力矩。力矩调控模块被配置成调控同侧的两个旋翼的旋转速度,使飞行器的机体从倾覆状态翻转至回正状态。
9、具体地,飞行器为四旋翼水上或跨介质飞行器,回正翻转轴的方向为飞行器体坐标系的x方向或y方向,可倾转旋翼的数量为两个。力矩调控模块包括:机体姿态误差获取单元和算法控制单元。机体姿态误差获取单元被配置成获取飞行器的机体的实际姿态相较于期望姿态的误差值。算法控制单元被配置成结合机体姿态误差获取单元获取的误差值,通过非线性控制方法使机体在有限时间内从倾覆状态翻转至回正状态。
10、优选地,非线性控制方法为滑模控制法,算法控制单元包括滑模控制器,滑模控制器被配置成基于趋近律的滑模控制法使机体在有限时间内从倾覆状态翻转至回正状态。
11、本公开的特点及优点包括:
12、本发明提出的飞行器水面倾覆回正方法和回正控制系统,是一种在倾覆状态下的大角度纵倾控制策略,能够实现水面倾覆的回转控制,适用于旋翼跨介质飞行器和复合翼跨介质飞行器,也适用于水上旋翼无人机等飞行器。水上飞行器或跨介质飞行器在水面漂浮,可以忽略重力的作用;同时,倾转力矩主要由能够倾转的处于水面上方的可倾转旋翼提供,由于水的阻尼作用不会使机身位置发生大的平移变化,能够在偏离倾覆位置的较小范围内实现回正。
技术特征:
1.一种飞行器水面倾覆回正方法,其特征在于,包括:
2.根据权利要求1所述的飞行器水面倾覆回正方法,其特征在于,所述力矩的调控方法包括:通过调节水面上方的所述至少一对可倾转旋翼的旋转速度来调节所述力矩的大小。
3.根据权利要求1所述的飞行器水面倾覆回正方法,其特征在于,所述力矩的调控方法包括:通过调节水面上方的至少一对可倾转旋翼的旋转速度以及调节水面下方的其它旋翼的旋转速度来调节所述力矩的大小。
4.根据权利要求2或3所述的飞行器水面倾覆回正方法,其特征在于,所述至少一对可倾转旋翼被构造成一对或两对可倾转旋翼;所述力矩的调控方法包括:
5.根据权利要求4所述的飞行器水面倾覆回正方法,其特征在于,
6.根据权利要求5所述的飞行器水面倾覆回正方法,其特征在于,所述飞行器为四旋翼水上或跨介质飞行器,所述至少一对可倾转旋翼被构造成两个可倾转旋翼,所述非线性控制方法采用基于趋近律的滑模控制法。
7.根据权利要求5所述的飞行器水面倾覆回正方法,其特征在于,所述飞行器为四旋翼水上或跨介质飞行器,所述至少一对可倾转旋翼被构造成两个可倾转旋翼,所述飞行器的姿态参数包括俯仰角θ、偏航角ψ和横滚角φ;
8.一种飞行器水面倾覆回正控制系统,其特征在于,所述飞行器为水上飞行器或跨介质飞行器,所述飞行器包括位于所述飞行器的回正翻转轴同侧的至少一对可倾转旋翼;所述控制系统包括:
9. 根据权利要求8所述的飞行器水面倾覆回正控制系统,其特征在于,所述飞行器为四旋翼水上或跨介质飞行器,所述回正翻转轴的方向为所述飞行器体坐标系的x方向或y方向,所述至少一对可倾转旋翼被构造成两个可倾转旋翼;所述力矩调控模块包括:
10.根据权利要求9所述的飞行器水面倾覆回正控制系统,其特征在于,所述非线性控制方法为滑模控制法,所述算法控制单元包括滑模控制器,所述滑模控制器被配置成基于趋近律的滑模控制法使所述机体在有限时间内从倾覆状态翻转至回正状态。
技术总结
本发明涉及飞行器倾覆回正技术领域,提供一种飞行器水面倾覆回正方法及回正控制系统。飞行器水面倾覆回正方法包括:提供位于飞行器的回正翻转轴同侧的至少一对可倾转旋翼;第一次驱动可倾转旋翼从水面下方倾转至水面上方;驱动水面上方的可倾转旋翼朝相反的方向旋转;调控水面上方的可倾转旋翼旋转时对飞行器的机体产生的力矩,使机体绕回正翻转轴从倾覆状态翻转至回正状态;在机体从倾覆状态翻转至回正状态之后,第二次驱动可倾转旋翼从水面下方倾转至水面上方。本发明能够实现水面倾覆的回转控制,适用于旋翼跨介质飞行器和复合翼跨介质飞行器,也适用于水上旋翼无人机等飞行器。
技术研发人员:周后村,高福奎,柴璞鑫,卢星宇,吴文华,鞠金龙,逯明清,白兴之,张哲,范召林
受保护的技术使用者:中国空气动力研究与发展中心空天技术研究所
技术研发日:
技术公布日:2024/3/31
- 还没有人留言评论。精彩留言会获得点赞!