用于建筑工地的机器人巡检方法及系统
本发明涉及机器人导航,具体涉及一种用于建筑工地的机器人巡检方法及系统。
背景技术:
1、本部分的陈述仅仅是提供了与本发明相关的背景技术,并不必然构成现有技术。
2、随着通信技术以及建筑产业的日益发展,对于建筑工地或施工现场的整体施工情况的管控要求日益提升,建筑工地或施工现场的整体施工情况,可以是当前工程进度、场地安全以及人员安全等不同方面的实际情况。
3、发明人发现,现有巡检机器人多以预先设定路径或固定轨道为主,局限性较多,且固定轨道对现场施工的影响较大,无法自适应动态多变的建筑工地现场环境;公开号为cn117506854a的中国发明专利申请公开了一种建设工地巡检机器人和机器人控制方法,其通过无固定轨道的方式对建筑工地进行巡检,但是受限于建筑工地施工现场的复杂环境,机器人在按照得到的最优路径进行导航巡检时,容易出现剧烈的摆动,存在较高的安全隐患。
技术实现思路
1、为了解决现有技术的不足,本发明提供了一种用于建筑工地的机器人巡检方法及系统,根据得到的最优路径,以碰撞因子、曲率因子、平滑度因子以及维诺图因子的加和的最小为目标,对最优路径进行平滑优化,得到最终机器人巡检路径,基于最终机器人巡检路径进行建筑工地巡检,通过对最优路径的微调优化,避免了机器人巡检过程中的摆动,提高了巡检过程的安全性能。
2、为了实现上述目的,本发明采用如下技术方案:
3、第一方面,本发明提供了一种用于建筑工地的机器人巡检方法,
4、一种用于建筑工地的机器人巡检方法,包括以下过程:
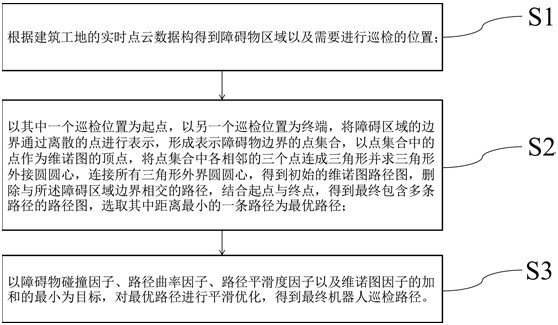
5、根据建筑工地的实时点云数据得到障碍物区域以及需要进行巡检的位置;
6、以其中一个巡检位置为起点,以另一个巡检位置为终点,将障碍区域的边界通过离散的点进行表示,形成表示障碍物边界的点集合,以点集合中的点作为维诺图的顶点,将点集合中各相邻的三个点连成三角形并求三角形外接圆圆心,连接所有三角形外界圆圆心,得到初始的维诺图路径图,删除与所述障碍区域边界相交的路径,结合起点与终点,得到最终包含多条路径的路径图,选取其中距离最小的一条路径为最优路径;
7、以碰撞因子、曲率因子、平滑度因子以及维诺图因子的加和的最小为目标,对最优路径进行平滑优化,得到最终机器人巡检路径,基于最终机器人巡检路径进行建筑工地巡检。
8、作为本发明第一方面进一步的限定,根据实时点云数据生成建筑工地的栅格地图,根据最优路径中的每个节点中心位置与最近障碍物之间的距离、节点中心位置与最近障碍物的最大距离阈值、第一惩罚项以及第一权重系数,得到碰撞因子。
9、作为本发明第一方面进一步的限定,根据实时点云数据生成建筑工地的栅格地图,根据最优路径中的每个节点切线角的变化量、位移向量、最大允许曲率、第二惩罚项以及第二权重系数,得到曲率因子。
10、作为本发明第一方面进一步的限定,根据实时点云数据生成建筑工地的栅格地图,根据最优路径中的相邻节点之间位移向量的差值以及第三权重系数,得到平滑度因子。
11、作为本发明第一方面进一步的限定,根据实时点云数据生成建筑工地的栅格地图,根据最优路径中的节点到最近障碍物的距离、维诺图的最小边缘距离、维诺图的最大边缘距离、维诺图衰减率控制参数、环境中障碍物距离的最大有效范围的常数以及第四权重系数,得到维诺图因子。
12、作为本发明第一方面进一步的限定,选取其中距离最小的一条路径为最优路径,包括:
13、将所有的相邻节点进行连接,任两个相邻节点之间构成线段,从起点开始,计算与起点相邻的线段的距离消耗,选取距离消耗最小的线段作为第一段最优路径;依次以前一个最优路径对应的末端点为起点进行最小距离消耗对应线段的选取,直至到达终点,得到最优路径。
14、第二方面,本发明提供了一种用于建筑工地的机器人巡检系统。
15、一种用于建筑工地的机器人巡检系统,利用本发明第一方面所述的巡检方法,包括:
16、数据获取单元,被配置为:根据建筑工地的实时点云数据得到障碍物区域以及需要进行巡检的位置;
17、最优路径生成单元,被配置为:以其中一个巡检位置为起点,以另一个巡检位置为终点,将障碍区域的边界通过离散的点进行表示,形成表示障碍物边界的点集合,以点集合中的点作为维诺图的顶点,将点集合中各相邻的三个点连成三角形并求三角形外接圆圆心,连接所有三角形外界圆圆心,得到初始的维诺图路径图,删除与所述障碍区域边界相交的路径,结合起点与终点,得到最终包含多条路径的路径图,选取其中距离最小的一条路径为最优路径;
18、路径平滑单元,被配置为:以碰撞因子、曲率因子、平滑度因子以及维诺图因子的加和的最小为目标,对最优路径进行平滑优化,得到最终机器人巡检路径,基于最终机器人巡检路径进行建筑工地巡检。
19、与现有技术相比,本发明的有益效果是:
20、1、本发明提供了一种用于建筑工地的机器人巡检策略,根据得到的最优路径,以碰撞因子、曲率因子、平滑度因子以及维诺图因子的加和的最小为目标,对最优路径进行平滑优化,得到最终机器人巡检路径,基于最终机器人巡检路径进行建筑工地巡检,通过对最优路径的微调优化,避免了机器人巡检过程中的摆动,提高了巡检过程的安全性能。
21、2、本发明将所有的相邻节点进行连接,任两个相邻节点之间构成线段,从起点开始,计算与起点相邻的线段的距离消耗,选取距离消耗最小的线段作为第一段最优路径;依次以前一个最优路径对应的末端点为起点进行最小距离消耗对应线段的选取,直至到达终点,得到最优路径,本发明以“线段”为单位进行搜索,提高了搜索效率。
22、本发明附加方面的优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
技术特征:
1.一种用于建筑工地的机器人巡检方法,其特征在于,包括以下过程:
2.如权利要求1所述的用于建筑工地的机器人巡检方法,其特征在于,根据实时点云数据生成建筑工地的栅格地图,根据最优路径中的每个节点中心位置与最近障碍物之间的距离、节点中心位置与最近障碍物的最大距离阈值、第一惩罚项以及第一权重系数,得到碰撞因子。
3.如权利要求1所述的用于建筑工地的机器人巡检方法,其特征在于,根据实时点云数据生成建筑工地的栅格地图,根据最优路径中的每个节点切线角的变化量、位移向量、最大允许曲率、第二惩罚项以及第二权重系数,得到曲率因子。
4.如权利要求1所述的用于建筑工地的机器人巡检方法,其特征在于,根据实时点云数据生成建筑工地的栅格地图,根据最优路径中的相邻节点之间位移向量的差值以及第三权重系数,得到平滑度因子。
5.如权利要求1所述的用于建筑工地的机器人巡检方法,其特征在于,根据实时点云数据生成建筑工地的栅格地图,根据最优路径中的节点到最近障碍物的距离、维诺图的最小边缘距离、维诺图的最大边缘距离、维诺图衰减率控制参数、环境中障碍物距离的最大有效范围的常数以及第四权重系数,得到维诺图因子。
6.如权利要求1所述的用于建筑工地的机器人巡检方法,其特征在于,选取其中距离最小的一条路径为最优路径,包括:将所有的相邻节点进行连接,任两个相邻节点之间构成线段,从起点开始,计算与起点相邻的线段的距离消耗,选取距离消耗最小的线段作为第一段最优路径;依次以前一个最优路径对应的末端点为起点进行最小距离消耗对应线段的选取,直至到达终点,得到最优路径。
7.一种用于建筑工地的机器人巡检系统,其特征在于,利用权利要求1至6任一项所述的用于建筑工地的机器人巡检方法,包括:
技术总结
本发明提供了一种用于建筑工地的机器人巡检方法及系统,属于机器人导航技术领域。根据建筑工地的实时点云数据得到障碍物区域以及需要进行巡检的位置,得到最优巡检路径后,以碰撞因子、曲率因子、平滑度因子以及维诺图因子的加和的最小为目标,对最优路径进行平滑优化,得到最终机器人巡检路径,基于最终机器人巡检路径进行建筑工地巡检。本发明通过对最优路径的微调优化,避免了机器人巡检过程中的摆动,提高了巡检过程的安全性能。
技术研发人员:孙良静,韩蕾,张文硕
受保护的技术使用者:山东工程职业技术大学
技术研发日:
技术公布日:2024/4/29
- 还没有人留言评论。精彩留言会获得点赞!