一种基于扰动补偿的AGV滑模路径跟踪控制方法
本发明涉及agv控制,具体涉及一种基于扰动补偿的agv滑模路径跟踪控制方法。
背景技术:
1、自动导引车(automated guided vehicles,agv)是一种无需人工干预的自动运输设备,它配备了传感器和制导系统,可以沿着规划的路径行驶。agv以自动化程度高、稳定性好、操作灵活著称。近年来,agv在各个工业领域中发挥着越来越重要的作用,被广泛应用于智能仓储、生产线运输、集装箱装卸等场合。路径跟踪是agv的关键技术之一,研究如何在保证行车安全性和舒适性的前提下,控制车辆沿预定路径行驶。近年来,如何提高agv的路径跟踪精度受到了广泛关注。由于滑模控制具有鲁棒性强、响应速度快、物理实现简单等优点,在agv路径跟踪控制领域得到了广泛的应用。然而,由于滑模趋近律中的符号函数,当状态点到达滑模面时,系统状态很难严格地沿滑模面向平衡点滑动。相反,系统状态通过不断穿越滑模面接近平衡点,产生抖振现象。众所周知,抖振是不可取的,因为它可能触发高频未建模的动态,甚至导致系统不稳定。agv在实际运行过程中,不可避免的会受到未知外部扰动,对控制系统的稳定性有显著的负面影响。
2、因此,现需要一种能够有效消除滑模控制带来的系统抖振现象,实现高精度的路径跟踪的基于扰动补偿的agv滑模路径跟踪控制方法。
技术实现思路
1、本发明的主要目的在于提供一种基于扰动补偿的agv滑模路径跟踪控制方法,以解决现有技术中不能有效消除滑模控制带来的系统抖振现象,不能实现高精度的路径跟踪的问题。
2、为实现上述目的,本发明提供了一种基于扰动补偿的agv滑模路径跟踪控制方法,具体包括如下步骤:
3、s1,对agv进行运动学建模并建立agv位姿误差模型。
4、s2,设计一种由状态观测器以及rbf神经网络构成的等效扩张状态观测器eso。
5、s3,设计滑模控制器,包括:设计滑模等效控制律和设计改进变速控制律。
6、s4,基于rbf神经网络估计滑模控制器参数。
7、进一步地,步骤s1具体包括如下步骤:
8、s1.1,构建agv运动学模型:首先建立agv全局坐标系和局部坐标系,根据双轮差速驱动agv的线速度、角速度和位姿之间的关系建立运动学模型。
9、s1.2,基于步骤s1.1,根据agv实际状态与期望状态之间的关系建立位姿误差模型:
10、 (1);
11、式中为agv纵向误差,为的变化率,为横向误差,为航向角误差,为的变化率,和分别为agv实际状态下的线速度和角速度,和分别为agv期望状态下的线速度和角速度,和分别为纵向扰动和航向角扰动。
12、进一步地,步骤s2设计状态观测器具体包括如下步骤:
13、s2.1, 令, ,将步骤s1.2中的agv位姿误差模型写成如公式(2)的矩阵形式:
14、 (2);
15、式(2)中为系统矩阵,为输入矩阵,为控制输入,为非线性项,为输出矩阵,为的变化率。
16、设计的状态观测器为:
17、(3);
18、式中,是状态观测器观测到的状态的估计值,是状态观测器增益,是非线性项的估计值。
19、s2.2,为了估计未知扰动,令,作为新的扩张状态,并且使用rbf神经网络进行估计。
20、取,,则式(2)所示的agv位姿误差模型被扩张为公式(4)的形式:
21、(4);
22、式中,和将由rbf神经网络估计,和代表和的变化率。
23、进一步地,步骤s2中基于rbf神经网络进行扰动估计具体包括如下步骤:
24、s2.3,rbf神经网络隐含层和输出层之间的权值表示为,是第个神经元与输出层之间的连接权值;如果未知扰动由隐含层节点描述,则使用rbf神经网络对扰动的逼近表示为:
25、 (5);
26、式中是理想权值,是高斯核函数,是神经网络输出值和系统扰动的真实值之间的有界逼近误差。
27、s2.4,使用rbf神经网络对未知扰动进行估计,未知扰动的估计值表示为:
28、(6);
29、式(6)中是状态观测器的观测值,是输入为时的高斯核函数,是有界逼近误差的估计值,是权值的估计值并且根据式(7)所示的自适应律进行调整:
30、(7)。
31、式中,是需要设定的正常数,,代表状态估计误差,是对称正定矩阵,,是输入为x时的高斯核函数,是高斯核函数的估计值,是高斯核函数及其估计值之间的误差,令,则的估计值根据自适应律进行调整:
32、(8)。
33、基于新的扩展状态及式(6)所示的扰动估计值,agv纵向扰动和航向角扰动被表示为:
34、(9);
35、(10);
36、其中,是扩张状态的估计值,是扩张状态的估计值。
37、将式(9)和式(10)所示的扰动表达式代入式(1)所示的误差模型中,基于观测值的agv位姿误差模型表示为:
38、(11)。
39、进一步地,步骤s3中的滑膜等效控制律设计具体包括如下步骤:
40、s3.1,设计滑模面:
41、(12);
42、式中,,是正的常数,,是当前时刻。
43、对滑模面求微分可得:
44、 (13)。
45、s3.2,根据滑模控制理论,令并且结合式(11)所示的agv位姿误差模型,得到等效控制律:
46、 (14);
47、式中,,,和分别是线速度和角速度的等效控制律。
48、进一步地,步骤s3中的改进变速控制律的设计具体包括如下步骤:
49、s3.3,传统指数趋近律为:
50、(15);
51、式中是指数趋近项,是等速趋近项;和是正的设计参数,用于调整趋近律的趋近速度。
52、s3.4,引入函数和双曲正切函数设计改进变速趋近律,函数和双曲正切函数的表达式如下:
53、(16);
54、式中,,是函数在原点附近的边界层的长度,是非线性因子。
55、(17);
56、s3.5,设计的改进变速趋近律为:
57、(18);
58、将式(18)所示的改进变速趋近律展开得到:
59、(19);
60、设计改进变速控制律为:
61、
62、(20);
63、式中和是式(18)中所述的改进变速趋近律。
64、基于式(14)和式(20),agv滑模路径跟踪控制器为:
65、
66、(21)。
67、进一步地,步骤s4具体包括如下步骤:
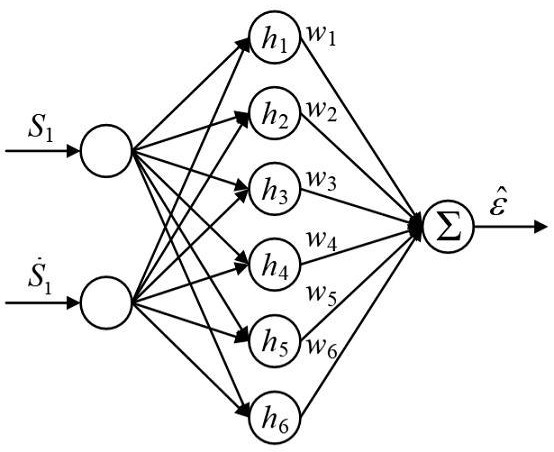
68、s4.1,采用rbf神经网络对滑模控制器中切换控制项的增益系数进行估计,rbf神经网络的输入向量为滑模面及其导数,即,隐含层神经元的个数为6个,则神经网络的输出为:
69、(22)。
70、s4.2,评价函数设计为:
71、(23);
72、式中是时刻的速度,是时刻的速度。
73、s4.3,通过基于梯度下降法计算评价函数的负梯度来更新参数:
74、(24)。
75、式中是第i个权值的更新学习增量,评价函数和的关系如下:
76、(25)。
77、s4.4,神经网络学习更新后的权值表示为:
78、(26)。
79、因此进行参数估计后,控制器(21)被表示为:
80、(27)。
81、本发明具有如下有益效果:
82、本发明设计了一种状态观测器与rbf神经网络相结合的等效扩张状态观测器eso,利用rbf神经网络对外部扰动进行补偿,提高了干扰估计的精度。通过rbf神经网络消除了等效扩张状态观测器eso扩张状态相关的参数调整,降低了全局参数整定的难度。提出了基于改进分段变速趋近律的滑模路径跟踪控制器。当系统状态点在边界层外时,能以较高的收敛速率收敛到边界层,当系统状态点在边界层内时,能保证平稳有效地到达状态点,抑制系统抖振现象。该控制器实现了agv的全局渐近稳定路径跟踪,且跟踪误差较小。采用rbf神经网络对滑模控制器参数进行估计,通过适当降低切换控制项的增益系数,有效地降低了系统抖振,进一步提高了路径跟踪的精度。
- 还没有人留言评论。精彩留言会获得点赞!