为了提高油采收率而确定烃移动化潜力的制作方法
为了提高油采收率而确定烃移动化潜力
背景技术:
[0001]
本公开涉及多相流体流动模拟,并且特别地涉及流体驱替(displacement)过程的模拟或建模。
[0002]
两相相对渗透率(例如,相对渗透率曲线(kr))描述了在存在另一种流体(例如,水)的情况下,一种流体(例如,油)可以如何容易地移动通过多孔介质。它是烃储岩(hydrocarbon reservoir rocks)的重要特点,并且是油气储层建模和模拟活动的关键输入。
[0003]
在多孔岩石中的水驱油(water displacement of oil)的情况下,通过注入井注入水以驱替油并将油推向生产井。在驱替期间,一些油可能被圈闭(trapped)在多孔岩石的孔隙空间中。这样的油被认为是不移动的(immobile),不能通过典型的驱替过程来驱替。除非应用提高油采收率(eor,enhanced oil recovery)方法,否则不能驱替被圈闭在多孔岩石的孔隙空间中的不移动油。eor方法试图使圈闭的油移动,从而提高油采收率。
[0004]
术语“润湿性(wettability)”被用于测量:与相同孔隙空间中的第二流体相比,流体粘附于(或润湿)表面的趋势,即,一个流体在存在其它不混溶的流体的情况下在固体表面上扩散或粘附的趋势。在油环境中,润湿性是储岩表面优先接触多相或两相流体系统中的特定流体的趋势。
[0005]
相对渗透率和通过多孔介质的多相流一般取决于流体-流体-岩石系统的各种特点,包括岩石表面特性、每个流体的物理特性和流动条件。一个流特点是无量纲的“毛细管数”(ca,capillary number),它表示粘性力(viscous force)与毛细管力(capillary force)之比。“毛细管数”(ca)通常被定义为表观流体速度(superficial fluid velocity)乘以参考流体(reference fluid)的粘度(viscosity)除以流体-流体界面张力(fluid-fluid interfacial tension)。另一个特点是“润湿性”,它表示岩石表面比一个流体更喜欢另一个流体,并表现为可测量的特性,称为接触角(contact angle)。润湿性通常分为水润湿(平均接触角0-90度)、中性润湿(~90度)、油润湿(90-180度)或其某种变型(诸如强水润湿或弱油润湿)。
[0006]
润湿性对多孔材料中的多相流动行为(诸如流动通过储岩的油和水、油和气、或水和气)有强烈影响。储岩(不同于人造材料)倾向于具有在空间上变化的润湿性,即,接触角在岩石的孔隙空间内的表面上随位置的不同而变化。接触角的分布是含烃岩石的矿物成分和地质历史以及表面纹理、与岩石接触的流体(例如,水、油)的化学成分等的结果。在与油接触之前,岩石几乎总是自然是水润湿的;随着油在地质时期内侵入孔隙空间,由于某些物质在油相中的粘附,初始的水润湿特点会在某些位置发生更改。润湿性更改的机制取决于各种局部系统特性,诸如压力、温度、矿物质类型和流体成分。
技术实现要素:
[0007]
所公开的主题提供了通过分析不移动油(被圈闭的油)来预测各种eor方法的有效性的有效技术,并且提供了用于规划eor研究的指导。一种计算系统执行多相流动模拟
(multiphase flow simulation)以获得在多孔储岩的水驱(waterflood)存在的情况下对油的流动行为的预测。在执行该多相流动模拟之后,多孔储岩中的不移动的油团块(blob)或斑片(patch)被定位和识别。针对尺寸、形状、周围孔隙空间特点(例如边界表面和相连通的孔隙空间区域)对样本孔隙空间中的这些油团块进行分析。还针对在团块附近的岩石的润湿性以及局部和全局流动条件(例如,压力和速度场)来分析样本孔隙空间中的油团块。在变化条件的迭代中评估每个被分析的团块,以确定将该油团块移动的条件。对所有油团块的整合将得出对某一eor方法的效率的评估。
[0008]
在一个方面,用于估计通过至少一个提高油采收率(eor)技术从多孔储岩可采收的烃量的计算机实现的方法包括:通过计算系统检索物理多孔储岩样本(多孔储岩)的表示,所述表示包括与该多孔储岩对应的孔隙空间和颗粒空间数据;在执行多相流动模拟以获得在多孔储岩的水驱存在的情况下对油的流动行为的预测之后,定位多孔储岩的检索到的表示中的基本不移动的油团块或斑片;以及对于n个基本不移动的油团块或斑片(团块),针对给定eor技术的两次或更多次迭代来评估该团块的移动性(mobility)的改变,其中所述两次或更多次迭代中的第一迭代花费第一努力水平,并且所述两次或更多次迭代中的第二迭代花费更高的第二努力水平,从而估计所述团块的移动化(mobilization)在所述给定eor技术的所述第一迭代和所述第二迭代之间的改变量。
[0009]
其它方面包括有形地存储在非暂时性计算机可读介质和诸如计算机系统、计算机服务器的计算系统上的计算机程序产品。
[0010]
以下是上述一个或多个方面中的一些附加特征。
[0011]
对包括给定eor技术的第一和第二努力水平的不同努力水平下的所有迭代进行整合,根据努力水平为给定eor技术提供可采收油的油增量的近似值。给定eor技术是第一eor技术,并且评估团块还包括针对不同的第二eor技术的两次或更多次迭代来评估团块的移动性,其中第二eor技术的所述两次或更多次迭代中的第一迭代花费第一努力水平,并且该不同的第二eor技术的所述两次或更多次迭代中的第二迭代花费更高的第二努力水平,以估计团块的移动化在该不同的第二eor技术的第一迭代和第二迭代之间的改变量。
[0012]
这些方面还包括产生对第一eor技术和第二eor技术中的每一个的评估。评估团块还包括对于第一eor技术和第二eor技术中的每一个,在包括第一和第二努力水平的不同努力水平下对所有迭代进行整合,以根据努力水平为第一eor技术和第二eor技术中的每一个提供可采收油的增量的近似值。所述团块包括连通的油相区域和/或作为附着到多孔储岩的壁的油的油斑片。努力包括增加给定eor技术的参数的量。努力包括注射表面活性剂的类型和注射流速中的一者或两者或更多者。努力包括增加应用于多孔储岩的第一eor技术和第二eor技术中的每一个的参数的量。努力包括改变注射表面活性剂的类型和注射流速中的一者或两者或更多者的值。
[0013]
上述方面中的一个或多个可以提供以下优点中的一个或多个。
[0014]
以上方面提供了对各种潜在eor方法的效率的估计,其可以应用于储层而无需运行每个潜在eor方法的实际模拟。该效率估计可以被比较并且为eor方法中的特定一个方法的部署提供指导,并且因此降低探测eor设计空间所需的测试的程度。这些方面可以增加多相流动模拟中的相对渗透率或毛细管压力模拟的值,并且提供对移动化效率的统计分布的洞察。所述方面可用于kr模拟配置设置的优化和结果的解释。例如,一个结果可以是对一个
流体被另一个流体驱替是发生在临界毛细管数以上还是以下(其中毛细管数是粘性力与毛细管力之比,并且临界毛细管数是毛细管数的值,其定义了导致油采收的油移动化的起始(onset))的预测。这些方面也可以应用于孔隙空间中的流体分布,该孔隙空间是从在实验室流体驱替实验中从物理岩石样本中获取的3d图像获得的。
[0015]
本发明的其它特征和优点将从以下描述和权利要求中变得清楚。
附图说明
[0016]
图1是用于预测不同提高油采收率技术的相对有效性的系统的框图。
[0017]
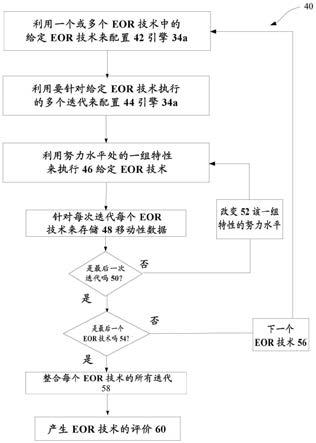
图2描述了显示用于预测不同提高油采收率技术的相对有效性的操作的流程图。
[0018]
图3描绘了显示用于估计油采收率的气驱(gas flood)模拟操作的流程图。
[0019]
图4描绘了通过喉部主体(throat body)的团块移动化的2d图示。
[0020]
图5描绘了喉部-主体-喉部管束(throat-body-throat tube bundle)的示例。
[0021]
图6描绘了沿着孔隙喉部/主体的中心线的压力分布。
[0022]
图7是图5的示例中理论预测移动化压力与模拟的流动化压力的曲线图。
[0023]
图8是伯里亚砂岩(berea sandstone)b200的相对渗透率(kr)曲线的曲线图。
[0024]
图9是团块体积的可视化和基于团块长度和团块数量的团块驱动力的曲线图。
[0025]
图10a和10b是两个毛细管数的条形图。
[0026]
图11描绘了移动化之前和之后的油团块体积的比较。
具体实施方式
[0027]
提高采收率(eor),通常称为三次采收(tertiary recovery),包括从储层中提取油的各种技术,所述油在初次或二次采收期间未被提取。在微观水平,未提取的油通常与圈闭或不移动的油相关联。所有eor方法试图使圈闭或不移动的油最小化。两种类型的驱替效率被认为是微观驱替效率和宏观驱替效率。
[0028]
微观驱替效率可以相对渗透率函数的形式描述。两相相对渗透率(kr)描述了在另一个流体存在的情况下一个流体可以如何容易地移动通过多孔介质。相对渗透率曲线还包括通常称为残余油的被圈闭的油的量。相对渗透率曲线是烃储岩的特点并且是油气储层建模和模拟活动的输入。相对渗透率和通过多孔介质的多相流动通常取决于流体-流体-岩石系统的各种特性,包括岩石表面性质、每种流体的物理性质和流动条件。
[0029]
一种流动条件是无量纲的毛细管数(ca),其表示粘性力与毛细管力的比率,并且通常被定义为平均流体速度乘以参考流体的粘度除以流体-流体界面张力。另一个性质是“润湿性”,即岩石表面对一种流体的偏好高于另一种流体。润湿性表现为可测量性质,称为接触角。润湿性通常分类为水润湿(平均接触角为0至约90度)、中性润湿(约90度)、油润湿(略高于90度至180度)或它们的一些变体,例如强水润湿或弱油润湿。
[0030]
油团块的移动化将导致对该油团块的至少部分采收。移动化提高油采收率。对于一种eor技术的一个努力级别的所有油团块移动化的整合将对应于一定量的增量油采收。然后,对于特定eor技术(例如,表面活性剂注入),该过程评估多于一个的努力(例如,表面活性剂浓度的连续增加)并确定储岩中所有油团块的移动化的增加量。可以通过针对每个努力水平(例如,表面活性剂浓度的增加)对所有油团块的结果进行整合来确定采收率,因
此多个努力水平将提供多个整合结果,其可以被使用和绘制或以其他方式渲染以用于评估。
[0031]
参考图1,示出了用于确定通过一种或两种或更多种提高油采收率技术从多孔储岩中可采收的烃的相对量的系统10。在该实现方案中,系统10基于客户端-服务器或基于云的架构,并且包括被实现为大规模并行计算系统12(独立的或基于云的)的服务器系统12和客户端系统14,服务器系统12包括存储器18、总线系统22、接口20(例如,用户接口/网络接口/显示器或监视器接口等)和处理设备24。
[0032]
在存储器18中是生成例如多孔储岩的数字表示的3d成像引擎32和根据对多孔储岩的数字表示的分析来确定多孔储岩中的孔隙空间网络的几何形状的特性的图像分析引擎32b。在存储器18中还有模拟引擎34,其针对各种饱和度值执行数值多相流动模拟,以获得通过多孔储岩的数字表示的流动行为的预测,该预测包括作为饱和度的函数的相对渗透率。在一些实施例中,模拟多相流动行为发生而通过邻近气井或油井(例如,钻机37)的储岩。
[0033]
多孔储岩地层的数字表示和由引擎32进行的用于确定孔隙空间网络的特性的图像分析可以是在不同于服务器12的系统上执行的第三方应用程序。系统10仅要求地层的数字表示和孔隙空间网络的分析可用作模拟引擎34的输入。提供储岩样本的数字表示的一种方法是例如从(一个或多个)储岩样本的显微ct扫描所产生的多孔储岩地层的3d成像中获得该表示。
[0034]
存储器18还存储由引擎34使用的参数,诸如通过将矿物类型33a指派给颗粒以确定每种矿物类型的表面特性而获得的颗粒表面特性,以及表面纹理和粗糙度特性。存储器18还存储参数,诸如流体特性33b,例如,每种预期流体(例如,水、气、油中的两种或更多种)的流体密度和粘度以及流体-流体界面张力特性。存储器18还存储用于特定矿物类型的参数,诸如流体的化学成分数据33c和流体成分的亲和度(affinity)数据33d。存储器18还存储与流体结合的每种矿物类型的分离压33e,以及由老化引擎32使用的选择的老化时间33f。此外,还存储储层压力和温度数据。被评估的矿物类型可以是在储层实际位置发现或预期的那些。
[0035]
模拟引擎34包括建立储岩样本模拟环境的模块(未示出)和执行水驱的孔隙尺度的数值模拟的模块(未示出)。该系统还包括分析模块34a,其通过在多孔储岩的模拟水驱之后分析不移动油(被圈闭的油),使得能够研究一种或两种或更多种eor方法中的每一种方法的不同努力水平的相对有效性,从而提供用于规划eor研究的指导。
[0036]
通常,对于给定的储岩样本,模拟仅需要运行一次,并且在完成模拟时,分析引擎34a被用于确定一种或两种或更多种eor方法中的每一种方法的(一个或多个)相对有效性努力水平。对于大多数实施方案,分析引擎34a的执行的计算成本(处理器、存储器资源等和时间等)很可能低于模拟引擎34。
[0037]
分析引擎(模块)34a在用于给定eor技术的变化参数的一次或两次或更多次迭代中,针对油团块的尺寸、形状、孔隙空间的周围几何形状(边界和相连通的孔隙空间区域)以及该团块附近的润湿性和局部和全局流动条件(压力和速度场),分析孔隙空间中的每个油团块。在一些实施方式中,可以每个eor技术使用一次迭代,而在其它实施方式中,可能需要两次或更多次迭代。在一些实施方式中,分析将涉及一个或多个eor方法的两个或更多个提
高的努力水平,并且在其它实施方式中,分析将涉及两个或更多个eor方法的一个或多个提高的努力水平。
[0038]
通过引用并入本文的、在2019年8月20日提交的、标题为“determination of oil removed by gas via miscible displacement in reservoir rock”美国专利申请系列号16/545,387描述了用于建立储岩样本模拟环境的模块和用于执行对水驱的孔隙尺度的数值模拟的模块的示例。
[0039]
在从这些分析获得数据后,对在多孔储岩的水驱模拟之后剩余的每个团块进行定位。剩余的团块是基本不移动的(例如,缓慢移动或圈闭的)油团块或斑片。对于n个这些基本不移动的油团块或斑片(团块),模块34a针对一种或两种或更多种eor技术中的每一种技术在各个努力水平上对团块进行评估,以便为该一种或两种或更多种eor技术中的每一种技术估计每个努力水平处的团块的移动化量。换句话说,分析每个油团块的移动性的变化以确定每种eor技术所需的使该油团块移动的最佳努力水平。模块34a针对每种eor技术在多个施加的努力中的每一个处执行对所有油团块上的移动化量的整合,以提供对各个eor技术的预测效率的测量。
[0040]
现在参考图2,模块34a执行eor筛选40。模块34a被配置42以执行对水驱的单个模拟,并且针对尺寸、几何范围、具有润湿条件的周围颗粒空间、局部流动场(压力、速度)和全局流动场(压力速度)对每个圈闭的油团块进行记录。分析模块34a被配置为44针对一种或两种或更多种不同eor技术中的每一种技术的各个努力水平执行若干次分析迭代。
[0041]
也就是说,模拟引擎34提供水驱之后的孔隙空间的状态。孔隙空间的该状态是表示35,其被分析引擎(模块)34a用来进行(一个或多个)努力水平和(一个或多个)eor技术的分析,以便确定(一个或多个)给定eor技术的(一个或多个)努力水平的最佳量。该表示35可以是数据结构的形式,该数据结构以结构化方式存储描述模拟之后的孔隙空间的状态的数据(包括圈闭的油团块的特征)。在其它实施方式中,可以使用平面文件或图形或其它计算机结构。表示35被馈送到分析模块34a并被其使用以分析46模拟的结果。表示35由分析引擎34a操作以确定被圈闭的油团块的后续特性,如通过将一组特性应用到团块在努力水平的各次迭代期间从分析引擎34a确定的那样,该一组特性表示给定的努力水平。每次努力的迭代通过确定相对增加的团块移动性来产生表示该迭代的有效性的数据。所产生的数据是针对每次努力迭代和每个eor技术而存储48的。模块34a被配置为确定50它是否是给定eor技术的最后一次努力迭代。如果不是最后一次努力迭代50,则模块34a被配置为改变52该一组特性的努力水平,并且使用给定eor技术利用表示新的努力水平的新的(即,改变后的)一组特性来执行46另一次努力迭代。
[0042]
用于给定eor技术的一组特性将由特定技术支配。例如,特性可以包括流速,表面活性剂、聚合物和表面活性剂-聚合物组合的相对浓度和类型,水交替气体(wag,water alternating gas)循环和(一个或多个)占空比等。其它示例包括注入溶解在盐水或水中的其它类型的化学品、注入蒸汽、注入气体等。其它特性包括驱动力(压头、主体力、注射流速)vs混溶驱替(co2注射)vs润湿性变化vs移动性变化等。该组特性将取决于被模拟的eor技术的类型。因此,努力迭代修改给定eor技术的一个或两个或更多特性,以分析该修改如何影响团块移动性的改变。
[0043]
如果是所配置的迭代中的最后一次50,则模块34a被配置为确定54引擎34a是否已
经模拟了最后一种eor技术。如果不是最后一种eor技术,则分析模块34a被配置为改变56该技术并提供新的eor技术。分析模块34a被配置有新的eor技术,根据新的eor技术,针对尺寸、几何范围、具有润湿条件的周围颗粒空间、局部流动场(压力、速度)和全局流动场(压力速度)针对每个圈闭的油团块的被记录的特性执行另一分析。分析模块34a对于具有不同努力水平的给定数目的努力迭代(给定eor技术的一组特性),分析46不同努力水平的各次迭代的模拟结果(记录的特性)。如果是最后一种eor技术,则模块34a被配置为评估58来自每个eor技术的所有迭代的结果,并且产生60用于所模拟的各种eor技术的评估。
[0044]
现在参考图3,从水驱开始,模块34a执行第一eor模拟70。例如,模块34a执行气驱并计算通过气驱产出了多少油,以及产出的油中有多少是由于直接驱替vs抽出(extraction)和膨胀(swelling)。系统10访问存储2d和/或3d网格、坐标系和库的数据储存库38,这些2d和/或3d网格、坐标系和库可以在使用诸如计算流体动力学或所谓的晶格玻尔兹曼(lattice boltzmann)方法的任何公知计算技术的模拟中被使用。
[0045]
在其他示例中,不是使用气驱来表示储岩的孔隙空间的状态,而是使用表面活性剂或聚合物驱替。原因是气体注入是第三相(油、水、气体),虽然通常是可接受的,但是也可以使用表面活性剂或聚合物驱替。表面活性剂驱或聚合物驱替不被认为是新的相。相反,水或盐水使用表面活性剂或聚合物在基本物理性质(粘度、界面张力)上改性以提高采收率。
[0046]
在接收到或检索到72储岩样本的孔隙空间和颗粒空间的数字表示后,模拟引擎模块34b设置输入参数和条件以执行对水驱的孔隙尺度的数值模拟,并且使用设置的模拟环境来执行74对水驱的孔隙尺度的数值模拟。在执行水驱74后,模拟引擎34将孔隙空间的状态存储76在存储器中,并且执行气驱模拟78,在执行气驱78后,模拟引擎34还将执行气驱模拟78之后的孔隙空间的状态存储80在存储器中。使用气驱模拟的结果,可以作为模拟引擎一部分的估计引擎计算46a由于直接驱替而通过气驱采收的油量,并计算46b由于抽出和膨胀而采收的油量。
[0047]
系统10被描述为使用lbm技术来进行水驱和气驱等模拟;然而,如上所述,可以使用计算流体动力学中的各种公知的计算技术中的任何一种。
[0048]
为了解释的目的,使用“晶格玻尔兹曼方法”(lbm)提供了用于流体流动模拟的多相模拟的简要描述。与数值求解宏观特性(即,质量、动量和能量)的守恒方程的其他计算流体动力学技术不同,lbm技术将流体建模为“粒子”,并且这样的粒子在由体元组成的网格上执行连续传播和碰撞过程。体元可以具有不同的尺寸,并且用作流体流动分析的基本单位面积。体元与描述特定区域中的流体状态的特性(例如包括描述该区域中的流体速度的速度矢量)相关联。在模拟的每个时间步期间,流体可以根据速度矢量从一个体元移动到另一个体元。碰撞算子描述由于流体运动而引起的不同流体碰撞的效果。
[0049]
lbm技术可以在可扩展的计算机平台上高效地实现,并且对于时间不稳定流和复杂边界条件以极大的鲁棒性运行。在一个示例中,孔隙尺度的多相流体流动模拟结果可以用于理解储岩中的流体驱替机制。储岩的micro-ct图像可以用于构建孔隙的几何形状,其用作每个模拟的输入。
[0050]
使用lbm技术的系统10确定相对渗透率和通过多孔介质的多相流动,其通常取决于流体-流体-岩石系统的各种特性,包括岩石表面性质、每种流体的物理性质和流动条件。一种流动条件是无量纲毛细管数(ca),其表示粘性力与毛细管力的比率,并且通常被定义
为平均流体速度乘以参考流体的粘度除以流体-流体界面张力。另一个性质是润湿性,其表示岩石表面对一种流体相对于另一种流体的偏好,并且表现为可测量性质,称为接触角。
[0051]
当被配置用于进行水驱和气驱的模拟时,系统10首先被配置用于进行水驱模拟。为了模拟水驱,模拟被设置为双流体模拟,其中水是注入孔隙空间的一种流体,而油是另一种流体。模拟水驱过程基本是模拟由于水的注入而导致的驱替。对于典型的润湿性过程,该过程被设置为迭代过程,其中润湿性更改被执行,随后是流体相重新分布。重复该过程直到引擎34确定润湿性更改收敛(如通过进一步重复测量而不显著改变结果(例如接触角)为止)。过程40参考建立的阈值,该阈值提供了为了停止润湿性更改模拟的进一步迭代而需要改变接触角的量。一种这样的过程在题为“determining fluidflow characteriscs of poropus medium”的、在2019年1月9号提交的美国专利申请序列号16/243,285中公开,其全部内容通过引用并入本文。润湿性过程使用两相相对渗透率(kr)过程来确定一种流体(例如油)在存在另一种流体(例如水)时的移动容易程度。
[0052]
两相相对渗透率是烃储岩的重要特性,并且是油气储层建模和模拟活动的关键输入。一种确定两相相对渗透率的技术公开于美国专利申请系列号14/277,909中,其在2014年5月15日提交,题为“mass exchange model for relative permability simulation”,在2014年11月20日公布为us-2014-0343858-a1,其全部内容通过引用合并于此。
[0053]
当被配置用于进行水驱和气驱的模拟时,系统10还可以跟踪地层中的团块。确定两相相对渗透率的一种技术在2015年3月17日提交的题为“fluid blob tracking for evaluation of multiphase flow simulations”的美国专利第14/660,019号中公开,其于2015年9月24日公开为us-2015-0268080-a1,其全部内容通过引用合并于此。
[0054]
在执行水驱模拟后,进行(特定eor类型的)气驱模拟。模拟引擎34因此被配置用于从水驱模拟所产生的孔隙空间的状态开始进行气驱模拟,其中孔隙空间中的残余水是流体之一,而烃(可混溶气+油)是另一流体。除了该模拟是针对烃(注入的气和油的组合量)和残余水而配置的之外,气驱模拟是使用上面讨论的技术进行的。
[0055]
尽管以上已经描述了水驱和气驱模拟的示例性模拟技术,但是应当理解,这些是示例性的。因此,在估计由于eor技术所致的潜在油采收的预测量的一些实施方式中,可以使用其它模拟技术。另外,在一些实施例中,可以使用孔隙空间的状态的实际现场数据来代替进行模拟。
[0056]
下面描述的是在努力水平的各次迭代上对模拟的结果(如从模拟引擎34确定的圈闭的油团块的被记录的特征)进行的分析模型的示例。
[0057]
现在参考图4,二维(2d)模型(其说明在水驱油的多流体流中的油移动化)示出了被困在孔隙喉部85前面的油滴83(中心的圆),喉部的顶部84的压力p1与在喉部的底部87的压力p0相比更高。油团块被推向孔隙边界,因此没有水流是可能的,这意味着不存在粘性力。
[0058]
阻力由喉部的半径限定,并且可以使用拉普拉斯定律(参见下面的等式1)来表达。为了推动油团块通过喉部,所施加的压差p
1-p0需要等于或大于p
l
或者说p
1-p0≥p
l
,其中p
l
为阻挡性毛细管压(给出为p
l
=σ/r)。当p
1-p0≥p
l
时,油团块的表面的曲率能够达到使油团块82侵入孔隙喉部89所需的曲率1/r。因此,只要圈闭机制是已知的(在这个例子中:油团块阻塞喉部),就可以预测/估计使油团块移动所需的力。
[0059]
实施例1:喉部-主体-喉部管束
[0060]
现在参考图5,示出了使用作为喉部-主体-喉部管束cdc(毛细管去饱和曲线)的模型的示例1。在该第一示例中,管束具有一系列简单孔隙喉部-孔隙主体管或由一系列简单孔隙喉部-孔隙主体管组成,所述孔隙喉部-孔隙主体管用作评估(一个或多个)eor技术的(一个或多个)努力水平的模型。
[0061]
毛细管去饱和曲线(capillary desaturation curve)方法是一种方法,其中毛细管数递增地增加,并且如上所述地测量剩余油饱和度并绘制曲线。在这个例子中,每个孔隙主体(在图5的垂直中心)是圆柱形的,并且具有10个体元的半径。孔隙喉部(未被标记)具有圆柱形形状并具有各种半径。左边的最大半径具有6个体元半径,右边的最小孔隙喉部半径是2个体元。非润湿流体仅在孔隙主体中初始化。该模型在z方向上是周期性的,从而连通流体域的顶部和底部。使用主体力(body force)作为驱动力。从主体到喉部的孔隙半径的减小(孔隙纵横比)导致非润湿流体的圈闭。
[0062]
现在参考图6,示出了沿图5的孔隙喉部/主体的中心线的压力分布。图6示出了作为z(位置晶格长度)的函数的静态压的曲线图。被圈闭的非湿润流体的移动化需要驱动力(例如,主体力)至少与阻力——毛细管压力一样高,该毛细管压力与孔隙喉部半径有关。驱动力与由孔隙喉部在流动方向上的几何延伸以及由孔隙空间边界的材料特性(例如,润湿性)引起的毛细管力相比更大。
[0063]
以下等式描述了这种力平衡,其中左手侧表示由于重力引起的驱动力,右手侧表示通过拉普拉斯定律描述的毛细管力:
[0064][0065]
现在参考图7,示出了图4的示例的理论预测移动化压力与模拟移动化压力的关系。如所示的,所需驱动力与使用拉普拉斯定律(等式1)的理论估计匹配得相对较好。在这种情况下,通过考虑理论比较,用于移动化的所需的驱动力是已知的。这是可能的,因为几何形状的拓扑结构是精确已知的,并且几何形状拓扑结构是简单的,例如孔隙喉部和孔隙主体的半径(r1和r2)以及孔隙喉部的长度(l
top
和l
bottom
)和孔隙主体的长度(l
middle
)。
[0066]
确定移动化的起始的另一种方式是测量非润湿流体顶部的压力(p
top
)和非润湿流体正下方的压力(p
bottom
)。定义移动化的起始的力平衡被给出为:
[0067][0068]
在复杂孔隙空间(如多孔岩石的孔隙空间)中,几何结构的拓扑结构与流体分布相结合不是简单的,并且理论估计方法可能不是可靠的。
[0069]
然而,本文描述的方法通过测量在被圈闭的流体实体(团块)附近的所有力贡献者来研究力平衡,并且计算对使该被圈闭的流体实体移动所需的驱动力的增加的估计。在这种情况下,这意味着测量p
top
,p
bottom
,l
middle
以及r1和r2。所有这些量可以在孔隙空间中测量,并且可以估计使该被圈闭的流体实体移动所需的驱动力(例如,主体力)。
[0070]
实施例2:伯里亚砂岩cdc
[0071]
在物理岩石的孔隙空间中,孔隙空间和流体流动与上述实施例1相比更复杂。对于水润湿岩石(其中油是非润湿流体),如实施例1中所述的力平衡仍然有效并且可以被应用。
为了解释基本概念,引入了一些简化。在真实岩石的孔隙空间中,圈闭的油团块通常不阻塞润湿流体的流动,这导致方程(2)的简化,因为p
top
,p
bottom
几乎相同。为了进一步简化该示例,可以假定孔隙主体的半径r1比喉部半径r2大得多。呈现这些简化以便提供对所公开的主题的潜力的简单解释,但是对于实践本文描述的主题不是特别需要的。
[0072]
所得到的简化方程如下:
[0073][0074]
公式3的左手侧表示作用在某一长度l
middle
,的被圈闭的团块上的驱动力,右手侧表示由该团块被圈闭的下一喉部的喉部半径r2引起的毛细管压力。为了证明孔隙尺度的eor筛选的潜力,选择相对小的域(b200)作为测试例。
[0075]
图8显示了渗透性相对于水饱和度,并描述了相对渗透性kr曲线,其是对于伯里亚砂岩b200以1.0e-5的毛细管数模拟得出的,用作测试例。残余油饱和度为42%。[这在图8中通过(100%-点81处的水饱和度值(58%)来描述)。该孔隙空间的瓶颈半径(例如,临界喉部半径)是2.2个体元。为了进一步简化,该演示假设所有孔隙喉部具有2.2个体元的半径,例如均匀的孔隙空间。其它实施方式可包括所有相关细节,以通过测量每个团块被圈闭处的喉部尺寸来获得每个圈闭的团块在流动方向上的数值上精确的孔隙喉部半径。
[0076]
现在参考图9,示出了团块体积的可视化(左)和基于团块长度和团块数量的团块驱动力的绘图(右)。孔隙几何形状(岩石中的孔隙)没有被可视化。暴露于一定驱动力的团块(条)的数量由这些团块的z向延伸(团块长度l)确定。驱动力可以近似为团块长度l、团块的流体密度rho和驱动力g(重力)的乘积。流体由在z方向(上下)上的主体力g驱动。水平线代表对于某些喉部半径的毛细管力。线91表示克服瓶颈孔隙喉部尺寸所需的毛细管力。在驱动力超过克服瓶颈孔隙喉部所需的毛细管力的地方没有团块。
[0077]
现在参考图10a和10b,两个毛细管数的条形图示出了跨越周期性边界条件(上下)的两个最大的团块92a、92b(图9),并且在条形图中在ρ*g*l=0.02(图10a)附近表示的团块被去除。这些团块被去除是通过在线91上没有团块(由图10b中的条表示)来说明的,线91是瓶颈半径所需的毛细管压力。这表明圈闭标准对于该示例是成立的。为了使两个最大的团块92a、92b移动,需要增加驱动力(这里是主体力)。这将导致例如比条形图中更高的毛细管数,并且可以看出主体力(并且因此毛细管数)增加50%将很可能使两个最大的团块移动。
[0078]
现在参考图11,示出了移动化之前和之后油团块体积的比较。可以看出,当在1.5e-5的较高毛细管数下继续模拟时,两个最大的团块92a、92b如预期的那样被移动。比较两个条形图,也可以看出两个最大的团块92a、92b不仅消失,而是它们分裂成几个更小的团块。
[0079]
再次,在ca=1.5e-5时,不存在ρ*g*l>0.02的团块。由于移动化,残余油饱和度从42%降低至36%。应当注意,当油团块被移动时,不一定需要整个油团块被采收并因此从孔隙空间中除去。相反,它仅仅指示团块开始移动,并且最终经历突然消失现象(分裂事件)。所得到的较小的团块可能行进到下一个孔隙,与下游的团块合并,这可能导致随之发生的移动化现象。可以基于相关性来估计由于增加移动化而采收了多少油的精确确定,它不是微不足道的确定。其它方法可使用机器学习方法来将孔隙空间和油团块拓扑与移动化之后的油团块体积的减少相关联。虽然该团块没有消失而是分裂成几个更小的团块,但是该团
块占据了实际被采收的油中的一些量,因此从孔隙空间中去除。
[0080]
将移动化之后确定团块状态存储在移动化模拟的数据库中。移动化模拟的数据库可以用于产生相关性(使用或不使用机器学习技术)以提供对整个毛细管去饱和曲线的估计。
[0081]
提供对整个毛细管去饱和曲线的估计的一种方法如下所示:
[0082]
系统10模拟某一毛细管数的第一kr曲线,以提供cdc曲线的第一点。第一毛细管数通常非常小。系统10关于移动化执行孔隙尺度的分析,并因此估计实现一定增量油生产所需的毛细管数。这是cdc曲线的第二点。系统重复孔隙尺度的分析以获得第三点。
[0083]
这种类型的孔隙尺度的分析的另一结果是,基于团块距被产出有多么“接近”,可以看出流动状态是否在毛细管数占主导的状态内。这是因为每个岩石具有不同的特定临界毛细管数,其限定了移动化的起始。总之,对于示例2,所应用的过程与在基本概念的描述中解释的过程是一致的。
[0084]
研究在圈闭的团块附近的流体和流动:测量压差(或者在此设为0),使用ρ*g*l来估计该团块上的驱动力。研究了在圈闭的团块附近的孔隙空间:确定了孔隙喉部半径(这里:使用了瓶颈半径),其是估计阻力所需要的。建立力平衡形式的关系以评估移动化标准。提出了一种方法来估计所产出的增量油量,并确定驱替是在临界毛细管数(移动化阈值)之上、之下还是在临界毛细管数处进行。整合整个域的移动化努力和增量油采收。
[0085]
实施例3:钉住的油(斑片)
[0086]
当颗粒偏向于与油而不是水接触时,并且因此在油润湿岩石中,残余油通常不位于孔隙主体的中心,而是通常以相对薄的斑片的形状附着到壁上。通过钉扎(spinning),例如润湿性的转变,油斑可能完全被圈闭,或者油斑可能通过膜流动(film flow)而非常缓慢地产出。两种情况都需要不同的移动化机制。在钉住的油斑的情况下,必须克服接触角滞后。驱动力可以由压降产生,也可以由其它流体相的旁路流动产生的粘性力产生。阻力是由于接触角的转变造成的——在某种意义上,这也是毛细管力。
[0087]
估计克服钉住效应并因此使油团块/油斑移动所需的努力的过程与针对基本概念和上述实施例2所述的过程基本相同。该方法包括调查被圈闭的团块附近的流体和流动,调查被圈闭的团块附近的孔隙空间,建立力平衡并因此建立移动化标准,估计增量采油量,并针对整个域将移动化努力和增量采油进行整合。
[0088]
实施例4:油膜
[0089]
在这种情况下,岩石也是油湿的,但是油斑片是连续的,即,油斑片是油膜。在这种情况下,不发生圈闭,但是油采收可能非常慢并且不经济的。代替移动化,目标可以是加速油产出,使得油产出的时间尺度代替增量油采收的术语。该过程与上述相同。代替优化增量油采收,增量油采收的速率是所采用的eor过程的要优化特征。
[0090]
实施例5:死端孔隙中的渗油或油润湿粘土中的油
[0091]
存在许多油难以驱替的情况,仅仅因为它难以被其它流体接近(直接接触)。当油在死端孔隙中时,或者当油在油湿粘土中时,情况可能是这样。在这种情况下,气体注入可以是eor方法的选择,并且驱替机制是油扩散到气相中,导致富气产出。该机制与上述机制相同。
[0092]
本说明书中描述的主题和操作的实施例可以在数字电子电路中实现,或者在计算
机软件、固件或硬件中实现,包括本说明书中公开的结构及其结构等效物,或者在它们中的一个或多个的组合中实现。本说明书中描述的主题的实施例可以被实现为一个或多个计算机程序(也称为数据处理程序)(即,在计算机存储介质上编码的用于由数据处理装置执行或控制数据处理装置的操作的计算机程序指令的一个或多个模块)。计算机存储介质可以是计算机可读存储设备、计算机可读存储基板、随机或串行存取存储器阵列或设备、或者它们中的一个或多个的组合,或者可以包括在它们中。计算机存储介质也可以是一个或多个单独的物理组件或介质(例如,多个cd、盘或其他存储设备),或者被包括在一个或多个单独的物理组件或介质中。本主题可以在存储在非暂时性计算机存储介质上的计算机程序指令上实现。
[0093]
本说明书中描述的操作可以被实现为由数据处理装置对存储在一个或多个计算机可读存储设备上或从其他源接收的数据执行的操作。
[0094]
术语“数据处理装置”包括用于处理数据的所有种类的装置、设备和机器,例如包括:可编程处理器、计算机、片上系统、或前述的多个或组合。该装置可以包括专用逻辑电路(例如,fpga(现场可编程门阵列)或asic(专用集成电路))。除了硬件之外,该装置还可以包括创建用于所讨论的计算机程序的执行环境的代码(例如,构成处理器固件、协议栈、数据库管理系统、操作系统、跨平台运行时环境、虚拟机或它们中的一个或多个的组合的代码)。该装置和执行环境可以实现各种不同的计算模型基础设施,诸如web服务、分布式计算和网格计算基础设施。
[0095]
计算机程序(也称为程序、软件应用、脚本或代码)可以以任何形式的编程语言编写,包括编译或解释语言、声明或过程语言,并且它可以以任何形式部署,包括作为独立程序或作为模块、组件、子例程、对象或适合在计算环境中使用的其它单元。计算机程序可以但不必对应于文件系统中的文件。程序可以存储在保存其他程序或数据的文件的一部分中(例如,存储在标记语言文档中的一个或多个脚本)、存储在专用于所讨论的程序的单个文件中、或者存储在多个协同文件中(例如,存储一个或多个模块、子程序或代码部分的文件)。计算机程序可以被部署为在一个计算机上执行,或者在位于一个地点或分布在多个地点并通过通信网络互连的多个计算机上执行。
[0096]
本说明书中描述的过程和逻辑流程可以由一个或多个可编程处理器执行,该可编程处理器执行一个或多个计算机程序以通过对输入数据进行操作并生成输出来执行动作。这些过程和逻辑流程还可以由专用逻辑电路(例如,fpga(现场可编程门阵列)或asic(专用集成电路))来执行,并且装置还可以被实现为专用逻辑电路(例如,fpga(现场可编程门阵列)或asic(专用集成电路))。
[0097]
适于执行计算机程序的处理器包括例如通用和专用微处理器,以及任何类型的数字计算机的任何一个或多个处理器。通常,处理器将从只读存储器或随机存取存储器或两者接收指令和数据。计算机的基本元件是用于根据指令执行动作的处理器和用于存储指令和数据的一个或多个存储器设备。通常,计算机还将包括用于存储数据的一个或多个大容量存储设备(例如,磁盘、磁光盘或光盘),或者可操作地耦合以从用于存储数据的一个或多个大容量存储设备接收数据或向其传送数据,或者两者;然而,计算机不需要具有这样的设备。此外,计算机可以嵌入在另一设备(例如,移动电话、个人数字助理(pda)、移动音频或视频播放器、游戏控制台、全球定位系统(gps)接收器、或便携式存储设备(例如,通用串行总
线(usb)闪存驱动器))中。适于存储计算机程序指令和数据的设备包括所有形式的非易失性存储器、介质和存储器设备,包括例如半导体存储器设备(例如eprom、eeprom和闪存设备)、磁盘(例如内部硬盘或可移动盘)、磁光盘以及cd rom和dvd-rom盘。处理器和存储器可以由专用逻辑电路补充或并入专用逻辑电路中。
[0098]
为了提供与用户的交互,本说明书中描述的主题的实施例可以在具有用于向用户显示信息的显示设备(例如,crt(阴极射线管)或lcd(液晶显示器)监视器)以及用户可以通过其向计算机提供输入的键盘和指示设备(例如,鼠标或轨迹球)的计算机上实现。其他种类的设备也可以用于提供与用户的交互;例如,提供给用户的反馈可以是任何形式的感觉反馈(例如,视觉反馈、听觉反馈或触觉反馈),并且来自用户的输入可以以任何形式接收,包括声音、语音或触觉输入。另外,计算机可以通过向用户所使用的设备发送文档和从用户所使用的设备接收文档(例如,通过响应于从用户的用户设备上的web浏览器接收到的请求向web浏览器发送网页)来与用户交互。
[0099]
本说明书中描述的主题的实施例可以在计算系统中实现,该计算系统包括后端组件(例如,作为数据服务器),或者包括中间件组件(例如,应用服务器),或者包括前端组件(例如,具有图形用户界面或web浏览器的用户计算机,通过该图形用户界面或web浏览器,用户可以与本说明书中描述的主题的实现进行交互),或者一个或多个这样的后端、中间件或前端组件的任何组合。系统的组件可以通过任何形式或介质的数字数据通信(例如,通信网络)互连。通信网络的示例包括局域网(“lan”)和广域网(“wan”)、互联网(例如,因特网)以及对等网络(例如,自组织对等网络)。
[0100]
计算系统可以包括用户和服务器。用户和服务器通常彼此远离,并且通常通过通信网络交互。用户和服务器的关系是由于在各自计算机上运行并且彼此具有用户-服务器关系的计算机程序而产生的。在一些实施例中,服务器将数据(例如,html页面)发送到用户设备(例如,为了向与用户设备交互的用户显示数据以及从该用户接收用户输入)。在用户设备处生成的数据(例如,用户交互的结果)可以在服务器处从用户设备接收。
[0101]
虽然本说明书包含许多具体实现细节,但是这些不应被解释为对任何发明的范围或者可以要求保护的范围的限制,而是作为对具体发明的具体实施例所特有的特征的描述。在本说明书中在单独实施例的上下文中描述的某些特征也可以在单个实施例中组合实现。相反,在单个实施例的上下文中描述的各种特征也可以在多个实施例中单独地或以任何合适的子组合来实现。此外,尽管特征可以在上面被描述为在某些组合中起作用并且甚至最初被这样要求保护,但是来自所要求保护的组合的一个或多个特征在一些情况下可以从该组合中被去除,并且所要求保护的组合可以针对子组合或子组合的变型。
[0102]
类似地,虽然在附图中以特定顺序描绘了操作,但是这不应当被理解为要求以所示的特定顺序或以连续顺序执行这样的操作,或者要求执行所有示出的操作以实现期望的结果。在某些情况下,多任务和并行处理可能是有利的。此外,上述实施例中的各种系统组件的分离不应被理解为在所有实施例中都需要这种分离,并且应当理解,所描述的程序组件和系统通常可以一起集成在单个软件产品中或封装到多个软件产品中。
[0103]
因此,已经描述了本主题的特定实施例。其它实施例也在所附权利要求的范围内。例如,参考孔隙空间描述的任何上述技术也可参考或关于物理介质如储岩样本进行。在一些情况下,权利要求中所记载的动作可以以不同的顺序执行并且仍然实现期望的结果。另
外,附图中描述的过程不一定需要所示的特定顺序或连续顺序来实现期望的结果。在某些实现中,多任务和并行处理可以是有利的。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1