用于装运集装箱有载与空载估计的方法和系统与流程
1.本公开涉及货物运输,并且具体涉及用于在拖车底盘上对车辆或集装箱的有载检测。
背景技术:
2.在货物运输期间,确定拖车是否有载是拖车资产管理的重要方面。在使用牵引车拖车来运输装运集装箱的情况下,重要的是了解拖车(本文中称为底盘)是否有载。
3.关于车辆装载的信息对运输公司可以是有益的。具体地,管理车队的运输公司需要知道哪些车辆有载以及哪些车辆为空置。
4.通常,通过人工检查来确定车辆有载,这是个繁琐过程,并且可以是缓慢、并且不准确的。
技术实现要素:
5.本公开提供了一种在计算设备处的方法,该方法包括:获取针对车辆的传感器数据,该传感器数据提供振动频率和幅度;计算针对带通滤波器对的低频通带和高频通带中的每个通带的能量;基于针对低频通带的能量和针对高频通带的能量来判定能量比例;将加权常数应用于以下项的每项以计算判决变量:低频通带的能量、高频通带的能量以及能量比例;以及如果判决变量低于阈值,则判定车辆无载,并且如果判决变量高于阈值,则判定车辆有载。
6.本公开还提供一种计算设备,包括:处理器;以及通信子系统,其中计算设备被配置为:获取针对车辆的传感器数据,传感器数据提供振动频率和幅度;计算针对带通滤波器对的低频通带和高频通带中的每个通带的能量;基于针对低频通带的能量和针对高频通带的能量来判定能量比例;将加权常数应用于以下项的每项以计算判决变量:低频通带的能量、高频通带的能量和能量比例;以及如果判决变量低于阈值,则判定车辆无载,并且如果判决变量高于阈值,则判定车辆有载。
7.本公开还提供了一种用于存储指令代码的计算机可读介质,当由处理器在计算设备上执行该指令代码时,使得计算设备:获取针对车辆的传感器数据,传感器数据提供振动频率和幅度;计算针对带通滤波器对的低频通带和高频通带中的每个通带的能量;基于针对低频通带的能量和针对高频通带的能量来判定能量比例;将加权常数应用于以下项的每项以计算判决变量:低频通带的能量、高频通带的能量和能量比例;以及如果判决变量低于阈值,则判定车辆无载,并且如果判决变量高于阈值,则判定车辆有载。
8.根据下文所描述的实施例,对利用竖直加速度计和/或应变计的货物载荷检测系统进行了描述。
9.在下文所描述的实施例中,在连接到牵引车的拖车底盘上执行载荷检测。然而,在其他情况下,可以在其他装运集装箱上进行测量,这些装运集装箱包括但不限于轨道车、卡车、汽车等。
附图说明
10.参考附图,对本公开进行更好的理解,其中:
11.图1是适于容纳装运集装箱的拖车底盘的侧视图,该图示出了传感器装置的示例放置;
12.图2是能够用于本公开的实施例的示例传感器装置的框图;
13.图3是示出了用于图2的传感器装置的示例架构的框图;
14.图4是示出了作用在弹簧和阻尼器上的集装箱和底盘的框图;
15.图5是示出了振动幅度根据有载底盘和无载底盘的频率变化的图;
16.图6是示出了使用两个带通滤波器的关于原始数据的eratio分布的图;
17.图7是示出了根据图6的图的因变量偏移的图;
18.图8是示出了在eratio与下带通滤波器的能量之间的关系的在二维平面上的图;
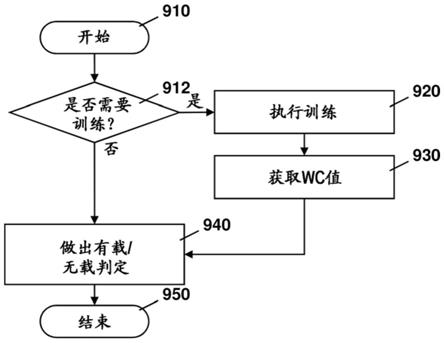
19.图9是示出了训练然后获取针对车辆的有载判决/无载判决的过程的过程图;
20.图10是示出了其中服务器计算eratio、e
l
和e
h
、并且使用它们来计算加权常数的针对训练过程的数据流图;
21.图11是示出了其中传感器装置计算e
l
和e
h
、并且将它们传递给服务器以计算eratio和权重常数的针对训练过程的数据流图;
22.图12是示出了其中传感器装置计算eratio、e
l
和e
h
、并且使用它们来计算加权常数的针对训练过程的过程图;
23.图13是示出了其中服务器计算eratio、e
l
和e
h
、并且使用这些常数和加权常数来判定判决变量的用于做出有载判决/无载判决的过程的数据流图;
24.图14是示出了其中传感器装置计算eratio、e
l
和e
h
、并且使用这些常数和加权常数来判定判决变量的用于做出有载判决/无载判决的过程的数据流图;
25.图15a是示出了基于eratio的判决变量分布的直方图的图;
26.图15b是示出了基于最小均方误差(mse)解决方案的判决变量分布的直方图的图;
27.图16a是示出了基于eratio的判决变量分布的直方图的图;
28.图16b是示出了基于支持向量机(svm)解决方案的判决变量分布的直方图的图;
29.图17是示出了在eratio与下带通滤波器的能量之间的关系、并且具有mse判决线和svm判决线的在二维平面上的图;
30.图18a是示出了基于eratio的判决变量分布的直方图的图;
31.图18b是示出了基于使用多个带通滤波器对的svm的判决变量分布的直方图的图;以及
32.图19是能够与本公开的实施例一起使用的示例计算设备或服务器的框图。
具体实施方式
33.为了执行载荷检测,传感器装置可以被附着到集装箱、拖车或其他类似资产上。这种传感器装置可以例如被安装在平板式拖车的底盘内部,该平板式拖车的底盘被配置为容纳装运集装箱。现在,参考图1。
34.在图1的实施例中,示出了示例卡车拖车110。在一个实施例中,计算设备可以被安装在拖车的底盘内。例如,在一个实施例中,计算设备可以被安装在卡车拖车110的后轮上
方。例如,这在图1的实施例中被示为具有传感器装置112。
35.然而,在其他情况下,针对传感器装置具有不同位置可以是有益的。进一步地,在一些实施例中,在拖车110内具有多个这样的传感器装置可以是有用的。
36.在一些实施例中,在拖车110内的传感器装置可以单独使用,或可以被组合成两个或更多个传感器装置和/或外部传感器的集合,以便用于载荷确定计算。
37.在图1的实施例中,拖车110适于将装运集装箱120稳固并且承载在其上。关于是否存在装运集装箱120的信息对于运输公司可以是有用的。
38.装置
39.关于图2示出了用于车辆、底盘、拖车、集装箱或其他运输资产的一种传感器装置。然而,图2的传感器装置仅是示例,并且根据本公开的实施例可以等同地使用其他感测设备。
40.现在,参考图2,其示出了示例传感器装置210。传感器装置210可以是任何计算设备或网络节点。这种传感器装置或网络节点可以包括任何类型的电子设备,其包括但不限于诸如智能电话或蜂窝电话的移动设备。示例还可以包括固定设备或移动设备,诸如物联网(iot)设备、端点、家庭自动化设备、医院或家庭环境中的医疗设备、库存跟踪设备、环境监控设备、能源管理设备、基础设施管理设备、车辆或车辆设备、固定电子设备等。
41.传感器装置210包括处理器220和至少一个通信子系统230,其中处理器220和通信子系统230协作以执行本文中所描述的实施例的方法。在一些实施例中,通信子系统230可以包括例如用于不同无线电技术的多个子系统。
42.通信子系统230允许传感器装置210与其他设备或网络元件通信。通信子系统230可以使用多种通信类型中的一种或多种通信类型,其包括但不限于蜂窝、卫星、蓝牙
tm
、蓝牙
tm
低能耗、wi-fi、无线局域网(wlan)、超千兆赫兹无线电、近场通信(nfc)、ieee 802.15、诸如以太网或光纤的有线连接、以及其他选项。
43.如此,用于无线通信的通信子系统230通常具有一个或多个接收器和发射器以及相关联部件(诸如一个或多个天线元件、本地振荡器(lo)),并且可以包括诸如数字信号处理器(dsp)或片上系统(soc)的处理模块。对于通信领域的技术人员而言,显而易见的是,通信子系统230的特定设计将取决于传感器装置旨在对其进行操作的通信网络或通信技术。
44.处理器220通常控制传感器装置210的整体操作,并且被配置为执行可编程逻辑,该可编程逻辑可以与数据一起使用存储器240存储。存储器240可以是任何有形的非暂态计算机可读存储介质,其包括dram、闪存、光学介质(例如,cd、dvd等)、磁性介质(例如,磁带)、闪存驱动器、硬盘驱动器、或本领域已知的其他存储器。
45.备选地或附加于存储器240,传感器装置210可以例如通过通信子系统230,从外部存储介质(未示出)访问数据或可编程逻辑。
46.在图2的实施例中,传感器装置210可以利用多个传感器,在一些实施例中,这些传感器可以是传感器装置210的一部分,或在其他实施例中,这些传感器可以与传感器装置210通信。针对内部传感器,处理器220可以从传感器子系统250接收输入。
47.在图2的实施例中的传感器的示例包括定位传感器251、振动传感器252、温度传感器253、一个或多个图像传感器/相机254、加速度计255、光传感器256、陀螺仪传感器257、门传感器258、应变计259以及其他传感器260。其他传感器可以是能够读取或获取对传感器装
置210有用的数据的任何传感器。然而,在图2的实施例中所示的传感器仅是示例,并且在其他实施例中,可以使用在图2中所示出的不同传感器或传感器子集。例如,在一些情况下,唯一的传感器可以是加速度计或应变计。
48.进一步地,加速度计255通常提供在三个维度中的加速度传感器。因此,加速度计255通常会包括三个单独加速度计。可以隔离来自三个单独加速度计中的每个加速度计的读数。
49.在一个实施例中,在传感器装置210的各个元件之间的通信可以通过内部总线265进行。然而,还可以存在其他形式的通信。
50.在图2的实施例中,在一些某些情况下,应变计传感器259可以在传感器装置外部(而不是内部应变计传感器),并且应变计传感器259可以由传感器装置210控制。应变计传感器270可以例如是可以与传感器装置210一起安装,或可以形成传感器装置210的一部分。单个或多个应变计传感器可以被安装在底盘的纵向框架上,以在集装箱被装载到底盘上时检测位移。在一些实施例中,应变计传感器可以由微处理器、应变计、电池以及短程技术无线电发射器(蓝牙、ieee802.15.4、或wi-fi)组成。传感器270可以被配置为测量相对于底盘的竖直位移或竖直位移和水平位移两者。
51.传感器装置210可以与应变计传感器270或应变计259通信,以在触发条件下查询应变计读数。触发条件的示例可以是:在(多个)传感器与传感器装置单元之间协商的常规唤醒时间表上;当拖车处于运动时;和/或当拖车停止时等。
52.当集装箱被装载时,应变计通常被移位、并且可以被校准,以估计集装箱的相对重量或绝对重量。
53.传感器装置210可以被附着到任何固定平台或便携式平台。例如,在一个实施例中,传感器装置210可以附着到装运集装箱或卡车拖车。例如,如图1所示,在其他实施例中,传感器装置210可以附着到拖车的底盘。在其他情况下,传感器装置210可以被附着到需要载荷检测的任何运输资产,其包括机动式车辆(例如,汽车、轿车、卡车、公共汽车等)、有轨车辆(例如,火车和电车等)、以及其他类型的车辆,这些车辆包括上述情况中任一种情况的任何组合,无论是当前存在还是之后出现等等。
54.在其他情况下,传感器装置210可以是可以在车辆上或车辆内承载的集装箱(例如,来自图1的集装箱120)的一部分。根据本公开,术语集装箱可以包括任何种类的货物或物品运输,诸如车辆、联运集装箱、装运箱、锁盒、以及其他类似容器。
55.这种传感器装置210可以是功率受限设备。例如,在一些实施例中,传感器装置210可以是电池操作的设备,其可以被附着到装运集装箱或拖车。其他受限功率源可以包括任何受限电源,诸如小型发电机或直流发电机、燃料电池、太阳能、能量收集等其他选项。
56.在其他实施例中,传感器装置210可以利用外部功率,例如来自拉动推车的牵引车的电池或功率系统、例如经由连接到7针插头的线束、例如插电式休闲车辆上的陆上功率源或建筑电源等等其他选项。因此,传感器装置210还可以连接到从功率源接收其功率的电源线。
57.外部功率还可以允许对电池充电,以允许传感器装置210随后再次在功率受限模式中操作。充电方法还可以包括其他功率源,诸如但不限于太阳能、电磁、声学或振动充电。
58.来自图2的传感器装置可以用于多种环境。关于图3,示出了其中可以使用传感器
装置的一个示例环境。
59.参考图3,提供了三个传感器装置,即,传感器装置310、传感器装置312和传感器装置314。
60.在图3的示例中,传感器装置310可以通过蜂窝基站320或通过接入点322进行通信。接入点322可以是任何无线通信接入点。
61.进一步地,在一些实施例中,传感器装置310可以通过诸如以太网或光纤等其他选项的有线接入点进行通信。
62.然后,通信可以通过诸如互联网330的广域网进行,并且进行到服务器340或342。
63.同样,传感器装置312和传感器装置314可以通过基站320或接入点322中的一者或两者与服务器340或服务器342等用于这种通信的其他选项进行通信。
64.在其他实施例中,传感器装置310、312或314中的任一传感器装置可以通过卫星通信技术进行通信。例如,如果传感器装置正在行进到蜂窝覆盖范围或接入点覆盖范围之外的区域,则这可以有用。
65.在其他实施例中,传感器装置312可以在接入点322的范围之外,并且可以与传感器装置310通信以允许传感器装置310充当通信中继。
66.在传感器装置310与服务器340之间的通信可以是单向通信或双向通信。因此,在一个实施例中,传感器装置310可以向服务器340提供信息,但是服务器340无响应。在其他情况下,服务器340可以向传感器装置310发出命令,但是数据可以被内部存储在传感器装置310上,直到传感器装置(可能地在特定时间窗口期间)到达特定位置为止。在其他情况下,传感器装置310与服务器340之间可以存在双向通信。
67.服务器、中央服务器、处理服务、端点、统一资源标识符(uri)、统一资源定位符(url)、后端和/或处理系统可以在本文的描述中被互换地使用。服务器功能通常代表与传感器装置310、312、314等的位置不紧密相关的数据处理/报告。例如,服务器可以基本上位于任何地方,只要它具有与传感器装置310、312、314等通信的网络访问权即可。
68.服务器340例如可以是车队管理集中监控站。在这种情况下,服务器340可以从与各种拖车或货物集装箱相关联的传感器装置接收信息,从而提供诸如这样的货物集装箱的位置、这些货物集装箱内的温度、包括突然减速在内的任何异常事件、温度过高或过低时的温度警报、拖车的货物装载状态、拖车的质量以及其他数据的信息。服务器340可以编译这些信息并且将其存储以供将来参考。
69.用于服务器340的其他功能性示例也是可能的。
70.在图3的实施例中,服务器340和342还可以访问第三方信息或来自网络内的其他服务器的信息。例如,数据服务提供商350可以将信息提供给服务器340。同样,数据存储库或数据库360也可以将信息提供给服务器340。
71.例如,数据服务提供商350可以是由服务器340使用以获取当前道路和天气条件的基于订阅的服务,或在一些情况下,数据服务提供商350可以是库存控制系统。
72.数据存储库或数据库360可以例如提供信息,诸如与特定位置关联的图像数据、航空地图、详细街道地图或其他此类信息。
73.数据服务提供商350或数据存储库或数据库360所提供的信息类型不限于上述示例,并且提供的信息可以是对服务器340有用的任何数据。
74.在一些实施例中,来自数据服务提供商350的信息或来自数据库360的数据存储库可以被提供给传感器装置310、312或314中的一个或多个传感器装置,以在那些传感器装置处进行处理。
75.诸如上文在图2和图3中所描述的传感器装置可以用于检测集装箱或拖车的拖车装载。
76.计算拖车装载
77.根据本公开的一些实施例,运输车辆或拖车的后段可以被建模为简单弹簧,具有质量“m”代表集装箱的质量和底盘的质量,以及弹簧常数“k”,其中k是结构和悬架的刚度。进一步地,可以取决于底盘的悬架的阻尼器使用阻尼常数“c”表示。例如,现在,参考图4。
78.在图4的实施例中,集装箱410的质量为“m
c”。底盘412的质量为“m
1”。在本公开中,质量“m”是质量m1和m
c
的组合。
79.弹簧420被示为具有弹簧常数“k”,其表示结构和悬架的刚度。
80.进一步地,使用悬架的表示422示出阻尼常数“c”。
81.位移“h”示出了从底盘的静止位置朝向地面的底盘运动量,例如,当在车辆正在操作的时由底盘遇到颠簸时。
82.如下文在等式1中的描述所提供的,等式1可以表达使用单个弹簧阻尼器的、以一维方式运动的底盘:
[0083][0084]
在等式1中,m是系统的质量,h是底盘从静止位置的位移,t是时间,k是弹簧常数,并且c是阻尼常数。
[0085]
在等式1中对振动频率进行求解,得出等式2:
[0086][0087]
基于等式2,振动频率与施加到拖车的质量成反比。当拖车处于相同的移动条件下时,拖车的振动频率将在底盘上被装运集装箱装载时向下偏移。
[0088]
如果在安全操作极限内装载卡车、拖车或其他类似资产,则在轴上的弹簧不应经历任何显著变形,显著变型可以影响振动频率。
[0089]
振荡的幅度取决于在地面中的车轮之间的任何冲击,但这样的冲击不会影响振动频率。
[0090]
例如,现在参考图5,其示出了分别在底盘装载有装运集装箱或卸载了装运集装箱时看到的振动频率的示例图。从图5可以看出,当底盘有载时,振动的峰值频率会发生偏移。
[0091]
基于图5,通过测量如由加速度计在竖直方向和/或如由应变计观察到的振动频率,可以检测到底盘或拖车是否有载。
[0092]
一种使用针对有载底盘和无载底盘的不同频率的方法可以是计算能量比例(eratio),以用于在低频与低频和高频的组合之间进行比较。特别地,可以使用带通滤波器对,一个带通滤波器处于较低频带,一个带通滤波器处于较高频带。可以在典型的有载频率和无载频率周围设置这样的带通滤波器,以捕获在这些频率周围的平均能量。
[0093]
在n次测试之后,可以从传感器收集原始数据的n个日志文件。例如,一个日志文件可以包含1024个样本。然而,该样本数目仅是为了说明而提供,并非限制。
[0094]
然后,通过检测器对来自这些文件的原始数据进行处理,其中低频带带通滤波器(lbpf)和高频带带通滤波器(hbpf)中的每个带通滤波器都生成与n个日志文件相对应的输出平均能量的n值。例如,这些输出值可以用e
l
(l)和e
h
(i)表示,其中下标“l”和“h”分别指示lbpf和hbpf,并且i=1,2,...,n。在检测器中,能量比例(eratio)还被计算如下:
[0095][0096]
使用上述等式3,当两个滤波器的截止频率都被正确设置时,当装载状态(ls)为“on”时,理想地e
h
(i)应当为零,得出r(i)为1。反之,当ls为“off”时,理想地e
l
(i)应当为零,而r(i)也应当为0。
[0097]
在实践条件下,使用上述等式3判定能量比例通常介于零与一之间。
[0098]
例如,现在,参考图6,其示出了通过分析原始数据而获取的在真实世界测试中的eratio值的图610,其中lbpf的带通被设置为介于2hz与5.5hz之间,而hbpf被设置为介于5.5hz与9hz之间。如图6所示,当装载状态为off时,eratio介于大约0.1与0.5之间。当装载状态为on时,eratio介于0.6与1之间。
[0099]
在一些情况下,可以更容易处理与-1相对应的“off”的装载状态以及与1相对应的“on”的装载状态。在这种情况下,eratio r
t
(i)的因变量可以被定义如下:
[0100][0101]
因此,图6可以被转换为r
t
(i)的图7的图710,从而使得在on和off的装载状态之间的截止为“0”。特别地,在这种情况下,判决规则可以如下:
[0102][0103]
上述比例仅基于以下现象:底盘弹簧的振动频率(vf)根据装载质量而发生变化。特别地,更重的装载导致更低的vf。通过使用eratio比较lbpf和hbpf的能量输出,检测到负载状态。然而,有时当r
t
(i)接近0时(即,当r(i)接近0.5时),则检测不可靠,并且可以导致误差检测。
[0104]
振动幅度
[0105]
为了改善装载状态检测的可靠性,还可以考虑装载状态的振动幅度(vm)变化。特别地,当底盘空置并且因此较轻时,在底盘上的弹簧通常将更自由地振动,因此具有更高的vm。相反,当底盘装载有沉重的集装箱时,弹簧的振动幅度会受到抑制。换句话说,vm也携带有关装载状态的某些信息。
[0106]
因此,根据下文所描述的实施例,装载状态检测可以基于能量比例r(i)以及由e
l
(i)和e
h
(i)的值等同地表示的振动幅度二者。
[0107]
现在,参考图8。图8的实施例示出了图810,该图810示出了在eratio与e
l
之间的示例关系。从图8的实施例可以看出,当利用eratio和e
l
二者时,可以更容易地分离两个数据集合。特别是,参考eratio为0.5的读数(如点820所示),关于挂车是有载还是无载,仅使用
eratio是无法得出结论的。然而,通过使用e
l
,这点更容易被区分为无载。
[0108]
为了便于这种分离,可以采用广泛用于机器学习(ml)的方法,并且针对第i个测试数据定义判决变量s(i)。例如,如果要使用eratio、e
l
和e
h
的值,则下文的等式6可以被定义如下:
[0109]
s(l)=w0+w1r(t)+w2e
l
(i)+w3e
h
(i)
ꢀꢀ
(6)
[0110]
等式6仅意指s(i)是r(l)、el(l)和e
h
(l)的加权线性组合,具有适当加权系数(wc)w
j
,j=0,1,2and3。这些wc将被最优化。
[0111]
如果仅要使用eratio和e
l
,则在上文的等式6中,w3可以被设置为零。
[0112]
在一些情况下,可以通过使用收集到的具有已知装载状态的测试结果来训练检测器,以便实现优化。假设已经从具有已知装载状态的n个测试中收集了足够的原始数据,则针对r(i)、e
i
(i)和e
h
(i)的原始数据可以被导出。然后,如下所述,使用这些变量和已知ls,可以通过训练获取最佳wc。
[0113]
然而,在一些情况下,可以针对一种类型的底盘执行训练,然后用于wc的值可以被传播到在相似底盘中的传感器装置。在这种情况下,训练可以只需要在底盘的子集中发生。
[0114]
在训练完成之后或一旦在传感器装置处接收到wc值,则上述等式6随后可以用于计算s(i)的值。一旦得知s(i)的值,就可以根据下文等式7做出装载状态判决。
[0115][0116]
在上述等式7中,值“0”是在训练期间判决的任意指派值。本领域技术人员应当领会,当使用等式6时,通过改变wc可以判定s(i)的值在任何中点周围。因此,等式7仅是判决等式的一个示例。
[0117]
训练
[0118]
通过训练来优化在上述等式6中的加权系数是机器学习的主要课题。存在许多众所周知的ml技术,其包括但不限于逻辑回归(lr)和神经网络(nn)。在这些方法中,从随机选择的wc初始值的集合开始,可以执行一定数目的迭代计算。wc在每次迭代中都会更新,最终收敛到wc的最终值。
[0119]
在本文中针对应用货物载荷检测的实施例中,描述了作为获取最佳wc的示例的两种解决方案。在第一解决方案中,提供了一种最小均方误差(mse)解决方案。在第二解决方案中,提供了一种支持向量机(svm)解决方案。然而,仅用于说明而提供这些解决方案,在其他情况下,可以使用不同的优化算法来判定wc变量的值。
[0120]
不失去一般性地,假设使用针对eratio、e
l
和e
h
判定的值正在判定上述等式6的解。特别是,已经从具有已知装载状态的n个测试中收集了原始数据,并且根据该原始数据,已经使用正确设计的lbpf和hbpf对导出出了b(i)、e
l
(i)和e
h
(i),其中i=1,3,...,n。在机器学习中,这些变量称为特征,而已知装载状态称为目标。
[0121]
由于存在n个样本,其中每个样本具有与一个目标相关联的三个特征,为了方便起见,特征可以分别表示为针对r(i)、e
l
(i)和e
h
(i)的x
i1
,x
i2
,和x
i0
。目标可以表示为y
i
。在一个示例中,如果已知ls(i)为on,则目标y
i-1,并且如果已知ls(i)是off,则目标y
i
=-1。
[0122]
mse解决方案
[0123]
使用最小均方误差方法,由于y
i
是每个测试的目标,所以理想地判决变量s(i)=
simplified smo algorithm)”,cs 229。
[0144]
多个滤波器对
[0145]
在上述实施例中,单个带通滤波器对用于对原始数据进行滤波,以便做出有载判决/无载判决。这假设已经正确选择了由两个带通滤波器的截止频率所代表的通带。
[0146]
在实践中,在一些实施例中,不能够确切知道应当为两个带通滤波器中的每个带通滤波器选择什么频带或哪个频带作为通带。在这种情况下,根据本公开的备选实施例,可以利用多个带通滤波器对。
[0147]
特别地,检测器包含k个lbpf和hbpf对,其中k大于或等于1。每个滤波器对设置有不同的通带。然后,来自传感器的原始数据可以同时应用于k个滤波器对。
[0148]
例如,下文的表1图示了一种情况,其中k=3,并且示出了各个对中的每个对的通带。
[0149][0150][0151]
表1:3个bpf对和通带的示例
[0152]
因此,如表1所示,每个带通滤波器对具有不同的截止频率。对于第i个测试,根据第k个bpf对,k等于1、2和3,我们可以导出三个变量:r
k
(i)、e
k,l
(i)、e
k,h
(i),总共有九个变量/特征可用。
[0153]
当存在三个带通滤波器对时,上述等式6可以被重写如下:
[0154]
s(i)=w0+w1r1(i)+w2e
1,l
(i)+w3e
1,h
(i)+w4r2(i)
[0155]
+w5e
2,l
(i)+w6e
2,h
(i)+w7r3(i)+w8e
3,l
(i)
[0156]
+w9e
3,h
(i)
[0157]
(15)
[0158]
上述等式15可以通过各种技术来求解,这些技术包括使用如上所述的msc或svm。进一步地,在一些情况下,如果忽略了e
k,h
(i),则等式15可以被重写如下:
[0159][0160]
再者,等式16可以通过各种技术来求解,这些技术包括使用如上所述的mse或svm。
[0161]
虽然上述示例提供了三个带通滤波器对,但这仅是为了说明,并且可以使用更多或更少个带通滤波器对。特别地,如果仅使用一个带通滤波器对,则可以使用上述解决方案。然而,在一些情况下,可以使用两个带通滤波器对或四个或更多个带通滤波器对。
[0162]
有载/无载状态的确定过程
[0163]
实际上,为了确定车辆的有载/无载状态,与车辆相关联的传感器装置可以测量振动频率和幅度。在一些情况下,可以在传感器装置或与车辆相关联的其他计算设备处对该
原始数据进行处理。在其他情况下,该数据可以被提供给服务器以执行处理。
[0164]
例如,在图9中提供了用于做出有载判决/无载判决的过程的高等级概述。在图9的实施例中,该过程在框910处开始,并且进行到框912,在该框912中,确定是否需要在特定车辆处进行训练。例如,如果先前已经执行了训练并且先前已经确定了各种加权系数,则可以不需要训练。这些加权系数可以存储在传感器装置或与车辆相关联的计算设备处,或可以存储在服务器处。因此,在其他示例中,框912处的确定可以包括:在其他示例之外,判定系数是否存储在传感器装置/计算设备处或标志是否存在于传感器装置/计算设备处,以指示系数存储在服务器上。
[0165]
在其他情况下,如果底盘类型与已经执行了训练的其他底盘类型类似,则可以不需要训练。在这种情况下,服务器可以将加权系数传递给传感器装置,或可以向传感器装置指示加权系数存在于服务器处。
[0166]
在其他情况下,服务器可以向传感器装置发布开始有载确定/无载确定的命令。在这种情况下,命令可以包括加权系数或在服务器处存在加权系数的指示。如果命令中缺少该信息,则传感器装置或与车辆相关联的其他计算设备可以得出结论:需要训练。
[0167]
还可以存在可以不需要训练的其他示例。
[0168]
如果需要训练,则过程从框912进行到其中执行训练的框920。下文参考图10、图11和图12对训练的执行进行更详细的描述。
[0169]
一旦已经执行了训练,则过程进行到框930,在该框930中,确定加权系数。确定加权系数会产生存储在服务器或传感器装置处的加权系数。
[0170]
在训练完成之后、或如果无需在框912处进行训练,则在一些情况下,传感器装置以及服务器在一些情况下可以使用先前所确定的、或指派给车辆的加权系数来做出如框940所示的有载判决/无载判决。
[0171]
然后,该过程进行到框950,并且结束。
[0172]
基于图9,与车辆相关联的由传感器所生成的原始数据通过安装在底盘上的设备收集。可以在传感器装置处或、通过远程服务器执行训练。然后,通过设备或服务器都可以做出新数据的有载判决/无载判决。
[0173]
如果通过服务器执行判决和/或处理,则传感器装置与服务器之间通常存在可靠的通信链路。
[0174]
关于训练,训练完全可以在服务器或其他类似的计算设备处发生,例如,如图10所示;在传感器装置和服务器或计算设备两者处发生,例如,如图11所示;或完全在传感器装置或车辆上的计算设备上发生,例如,如图12所示。其他选项或其他分布式模型也是可能的。
[0175]
现在,参考图10,其示出了在服务器1012处发生的训练的主要方面。特别地,在一些情况下,传感器装置1010可以从服务器1012接收命令1020,以开始训练过程。然而,命令1020是可选的,并且在其他情况下,训练可以基于其他因素(诸如来自车辆驾驶员的输入、传感器装置1010内的加权系数未知的检查、以及其他选项)发生。
[0176]
一旦开始训练,则传感器装置或服务器都需要具有拖车或底盘输入的装载状态。输入可以基于各种因素。例如,在一些情况下,车辆的操作员可以将装载状态输入到车辆或传感器装置中。这可以基于在传感器装置上的用户接口、在车辆本身上的用户接口、或车辆
的操作员可以访问的通信接口来出现。例如,在一种情况下,可以要求车辆的操作员把装载状态输入到文本消息中,该文本消息在训练周期期间被发送到服务器或传感器装置。在其他情况下,可以要求车辆的操作员按下按钮或拨动开关,以指示拖车是有载还是无载。用于向传感器装置或服务器提供关于车辆的装载状态的信息的其他选项也是可能的。
[0177]
在其他情况下,在训练期间,服务器可以例如基于运输时间表来知得知拖车是有载还是无载,并且使用这种信息来与传感器数据相关。
[0178]
在其他情况下,外部输入可以用于接收车辆的装载状态。例如,在装运场中的相机可以在车辆离开装运场时提供车辆的视觉图像,从而标识拖车是有载还是无载。这种图像可以验证集装箱是有载还是无载,或在一些情况下,如果拖车有载,则可以显示更靠近封闭集装箱上的底盘的轮子等其他选项。
[0179]
在其他情况下,传感器装置可以具有用于标识车辆是无载还是有载的次要机构,例如,相机、货物装载检测器(诸如光束或激光投影仪、以及用于感测封闭拖车是否包括货物的检测器)等其他选项。
[0180]
因此,如图10所示,传感器装置1010或服务器1012中的一者或两者可以基于上述技术中的一种或多种技术来接收装载状态。在图10的实施例中,如果传感器装置1010正在接收装载状态,则这在框1030处示出。如果服务器1012正在接收装载状态,则这在框1032处示出。
[0181]
然后,如框1040所示,传感器装置1010可以收集关于振动的频率和幅度的原始数据。这可以例如基于加速度计或应变计等其他选项来完成。
[0182]
一旦收集了原始数据,原始数据就可以被发送到服务器1012,如由消息1042所示。如果在框1030处接收到装载状态,则消息1042还可以包括装载状态。
[0183]
在一些情况下,消息1042包括完整的日志信息集合,以允许服务器1012确定加权系数。在其他情况下,可以定期发送具有部分信息(例如,一个单个日志条目)的消息1042。在这种情况下,框1020、1030、1032、1040和1042处的步骤可以重复多次,以允许服务器1012编译足够数据,以便确定加权系数。
[0184]
一旦在服务器1012处接收到完整的训练日志集合,则服务器随后可以如框1050所示出地计算r
k
(i)、e
k,l
(i)和r
k,h
(i)。例如,e
k,l
(i)和e
k,ll
(i)可以通过应用带通滤波器对中的一个或多个带通滤波器对来计算。然后,这些值可以用于计算r
k
(i)。
[0185]
一旦计算了r
k
(i)、e
k,l
(i)和e
k,h
(i),则过程进行到框1052,在该框1052中,可以计算加权系数。可以使用如上所述的mse或svm方法等其他选项来计算加权系数。
[0186]
一旦计算了加权系数,则过程进行到框1054,在该框1054中,加权系数可以被存储在服务器处、被提供给传感器装置、或既存储在服务器处又提供给传感器装置。
[0187]
在这点处,训练被完成,然后加权系数可以用于有载/无载确定。
[0188]
在一些情况下,可以在传感器装置或与车辆相关联的类似计算设备处执行更多的处理。现在,参考图11。
[0189]
在图11的实施例中,传感器装置1110与服务器1112通信。
[0190]
如同图10的实施例一样,在图11的实施例中,服务器1112可以向传感器装置1110发信号以开始训练,如在消息1120处所示出的。然而,消息1120是可选的。
[0191]
进一步地,与图10的实施例类似,可以在传感器装置1110或服务器1112中的一者
或两者处接收装载状态,例如,如在框1130和1132处所示出的。
[0192]
然后,如框1140所示,传感器装置1110收集原始数据。一旦编译了完整训练日志(one a complete training log is compiled),在图11的实施例中,过程然后进行到框1142,在该框1142中,传感器装置或与车辆相关联的计算设备基于一个或多个带通滤波器来计算e
k,l
(i)和e
k,h
(i)。
[0193]
一旦计算出e
k,l
(i)和e
k,h
(i),传感器装置1110就可以在消息1144中向服务器1112提供e
k,l
(i)和e
k,h
(i)。进一步地,如果在框1130处接收到装载状态,则装载状态也可以在消息1144中被提供给服务器1112。
[0194]
一旦已经在一个或多个消息1144中接收到所有日志信息,则服务器1112可以如框1150所示计算r
k
(i)。
[0195]
然后,过程进行到框1152,在该框1152中,可以计算加权系数(例如,如上文所提供的)。
[0196]
然后,过程进行到框1154,在该框1154中,服务器1112可以存储加权系数,将加权系数发送给传感器装置1110,或存储加权系数、并且把加权系数发送给传感器装置1110。
[0197]
此后,加权系数可以用于计算关于车辆的有载/无载状态。
[0198]
在又一实施例中,该过程完全可以在传感器装置处进行。现在,参考图12。
[0199]
在图12的实施例中,该过程开始于框1210。该过程可以例如基于触发以开始训练过程而开始。这种触发可以是来自服务器的命令、在拖车上不存在加权系数的标识、要发生训练的手动指示、以及其他选项。
[0200]
然后,过程进行到框1220,在该框1220中,在传感器装置处输入或接收车辆的装载状态。装载状态可以例如基于来自车辆操作员的手动输入、来自车辆上或车辆周围区域中的传感器、基于服务器或其他计算设备所提供的命令或信息等其他选项而被提供给传感器装置。。
[0201]
然后,过程进行到框1222,在该框1222中,收集原始数据。这种原始数据可以包括来自加速度计和/或应变计的读数等其他选项。
[0202]
过程从框1222进行到框1230,在该框1230中,基于一个或多个带通滤波器对来计算r
k
(i)、e
k,l
(i)和e
k,h
(i)。
[0203]
然后,过程进行到框1240,在该框1240中,基于上文所描述的技术或基于类似技术来计算加权系数。
[0204]
然后,过程进行到框1242,在该框1242中,加权系数被存储在传感器装置处,发送到服务器,或存储在传感器装置处并且发送到服务器。
[0205]
过程从框1242进行到框1250,并且结束。
[0206]
此后,在框1240处计算的加权系数可以用于做出有载判决/无载判决。
[0207]
一旦训练完成,则可以由传感器装置和服务器中的一者或两者使用加权系数来计算有载/无载状态。现在,参考图13和图14。
[0208]
在图13的实施例中,在服务器处确定车辆是有载还是无载。具体地,传感器装置1310与服务器1312通信。在一些情况下,服务器1312可以向传感器装置1310提供命令1320,以确定车辆是有载还是无载。在其他情况下,传感器装置1310可以周期性地确定有载状态或无载状态,或在传感器装置1310处的一些其他触发可以使得过程开始,以确定拖车是无
载还是有载。
[0209]
然后,过程进行到框1330,在该框1330中,获取包括振动频率和振动幅度的原始数据。
[0210]
然后,原始数据可以提供给服务器1312,如消息1332所示。在一些情况下,如果权重系数被存储在传感器装置1310处,则消息1332还可以包括车辆的权重系数。
[0211]
基于接收到消息1332,服务器1312可以如上文所提供地计算r
k
(i)、e
k,l
(i)和e
k,h
(i)。例如,这在图13的实施例中的框1340处完成。
[0212]
然后,过程进行到框1350,在该框1350中,存储在服务器1312处或在消息1332中接收的加权系数可以用于确定车辆的有载/无载状态。例如,等式6、15或16可以用于判定判决变量s(i)。一旦判定判决变量s(i),则判决变量可以被输入到等式7中以确定车辆是有载还是无载。例如,可以通过把变量放入上述等式9的矩阵x中然后使用等式12的w和x来求解等式12。
[0213]
在其他情况下,该过程完全可以在传感器装置处完成。现在,参考图14。
[0214]
图14的过程开始于框1410,并且进行到框1420,在该框1420中,进行检查以确定是否已经满足触发条件,以执行有载/无载状态检查。如上文所指示的,这种触发可以包括来自服务器的消息、定时器超时、诸如正在进入或退出地理位置的外部因素、手动输入以及其他选项。
[0215]
一旦触发被满足,则过程进行到框1422,在该框1422中,收集车辆的原始数据。这可以包括来自加速度计和/或应力计的传感器读数、以及其他选项。
[0216]
过程从框1422进行到框1430,在该框1430中,如上所述,计算r
k
(i)、e
k,l
(i)和e
k,h
(i)。
[0217]
然后,过程进行到框1450,在该框1450中,在传感器装置处存储(或从服务器接收的)的加权系数可以用于确定车辆的有载/无载状态。例如,等式6、15或16可以用于判定判决变量s(i)。一旦判定,然后就可以将判决变量输入到等式7中以确定车辆是有载还是无载。例如,可以通过把变量放入上述等式9的矩阵x中,然后使用等式12的w和x来求解等式。
[0218]
在一些情况下,一旦确定了有载/无载状态,传感器装置就可以把状态报告给服务器(未示出)。
[0219]
然后,过程进行到框1450,并且结束。
[0220]
因此,图9至图14的实施例利用振动的频率和振动的幅度来训练,并且随后确定有载/无载状态。
[0221]
实践示例1
[0222]
上述实施例在现实世界环境中进行了测试。特别是,如下文附录a中的表2所示,提供了具有已知装载状态的相关数据。在表2中,第三列列出了已知装载状态,其中1指示有载,而-1指示无载。该装载状态构成了上述等式12的向量y。表2的第四列、第五列和第六列分别列出了r
k
(i)、e
k,l
(i)和e
k,h
(i)。这些列构成上述等式9的矩阵x的最后三列。
[0223]
作为简单示例,考虑利用两个特征(即,r(i)和e
l
(i))的装载状态检测器。使用针对mse的等式13进行计算,判定加权系数w
mbe
=[-1.4742,3.1522,-0.1449]
t
。另一方面,对于svm,加权系数为w
svm
=[-2.9758,6.3533,-0.3371]
t
。
[0224]
为了看到与仅基于r’(i)的检测方案相比的改善,根据以下等式17来进行计算:
[0225]
s=xw
ꢀꢀ
(17)
[0226]
所得的s(i)在附录c中的表4的第2列至第4列中列出。
[0227]
图15a和图15b示出了从mse获取的判决变量相对于仅基于eratio获取的判决变量的直方图分布。特别地,图15a示出了仅基于eratio的直方图分布1510。图15b示出了基于mse的直方图分布1520。
[0228]
图16a和图16b示出了从svm获取的判决变量相对于仅基于eratio获取的判决变量的直方图分布。特别地,图16a示出了仅基于eratio的直方图分布1610。图16b示出了基于svm的直方图分布1620。
[0229]
在图15a、图15b、图16a和图16b的示例中,可以看出,使用svm的检测可靠性优于使用mse的检测可靠性,而mse优于仅基于eratio的检测器。
[0230]
图17示出了在图8的2d平面上的mse和svm的判决线。在图17中的线1710是将两种状态分离的svm判决线,而线1720是mse判决线。可以看出,svm线在两个数据集合之间给出了最大间隙,例如,如通过-1线1730和+1线1740所看出的。
[0231]
实践示例2
[0232]
在另一示例中,在表1中指定的三个bpf对中的每个bpf对的输出r(i)和e
l
(i)用于训练svm。在下文的附录b的表3中提供了训练数据。相应地,根据上文的等式16指定新判决变量。
[0233]
在使用svm进行训练之后,获取的加权系数为w=[-2.942、3.433、1.439、2.098、0.063、0.407、-1.369]
t
。
[0234]
相关数据和结果在下文的附录c中的表4的最后一列中列出。
[0235]
图18a和图18b示出了具有3个bpf对的判决变量相对于具有基于单个bpf对的eratio的bpf对的判决变量的分布。特别地,图18a示出了仅基于eratio的直方图分布1810。图18b示出了基于六个特征的加权和的直方图分布1820。图18b的实施例的一个益处如下:无需选择bpf的通带,现在,通过训练自动确定该通带。
[0236]
服务器
[0237]
诸如服务器340、342或350的服务器可以是任何网络节点。例如,关于图19,提供了可以执行上述实施例的一个简化服务器。
[0238]
在图19中,服务器1910包括处理器1920和通信子系统1930,其中处理器1920和通信子系统1930协作以执行本文中所描述的实施例的方法。
[0239]
处理器1920被配置为执行可编程逻辑,该可编程逻辑可以与数据一起存储在服务器1910上,并且在图19的示例中被示为存储器1940。存储器1940可以是任何有形的非暂态计算机可读存储介质,诸如dram、闪存、光学介质(例如,cd、dvd等)、磁性介质(例如,磁带)、闪存驱动器、硬盘驱动器、或本领域已知的其他存储器。在一个实施例中,处理器1920还可以完全以硬件实现,并且无需任何存储的程序来执行逻辑功能。
[0240]
备选地或附加于存储器1940,服务器1910可以例如通过通信子系统1930从外部存储介质访问数据或可编程逻辑。
[0241]
通信子系统1930允许服务器1910与其他设备或网络元件进行通信。
[0242]
在一个实施例中,服务器1910的各个元件之间的通信可以通过内部总线1960进行。然而,还可以存在其他形式的通信。
[0243]
本文中所描述的实施例是具有与本申请的技术的要素相对应的要素的结构、系统或方法的示例。该书面描述可以使得本领域技术人员能够制造并使用具有与本申请的技术的要素同样对应的备选要素的实施例。因此,本申请的技术的预期范围包括与本文中所描述的本申请的技术没有不同的其他结构、系统或方法,并且还包括与如本文所述的本申请的技术没有实质性差异的其他结构、系统或方法。
[0244]
虽然在附图中以特定顺序描绘了操作,但是这不应当被理解为要求以所示的特定次序或以顺序次序执行这样的操作,或执行所有图示操作以实现期望结果。在一些情况下,可以采用多任务处理和并行处理。而且,上文所描述的实现方式中的各种系统部件的分离不应被理解为在所有实现方式中都需要这种分离,并且应当理解,所描述的程序部件和系统通常一起可以集成在单个软件产品中或封装成多个软件产品。在一些情况下,功能完全可以以硬件执行,并且这种解决方案在功能上可以等同于软件解决方案。
[0245]
此外,在各种实现方式中被描述并图示为离散或分离的技术、系统、子系统和方法可以与其他系统、模块、技术或方法组合或集成。被示出或讨论为彼此耦合或直接耦合或通信的其他项可以通过某个接口、设备或中间部件以电、机械或其他方式间接耦合或通信。本领域技术人员可以确定且做出改变、替换和更改的其他示例。
[0246]
虽然上述的具体实施方式已经示出、描述并指出了应用于各种实现方式的本公开的基本新颖特征,但是应当理解,本领域技术人员可以做出所图示的系统的在形式和细节上的各种省略、替代以及改变。另外,方法步骤的次序并不通过它们在权利要求中出现的次序所暗示。
[0247]
当消息发送到电子设备或从电子设备发送消息时,这样的操作可以不是立即的,或不是直接来自服务器。它们可以从服务器或支持本文中所描述的设备/方法/系统的其他计算系统基础结构同步或异步递送。前述步骤可以全部或部分包括去往/来自设备/基础设施的同步/异步通信。而且,电子设备可以与网络上的一个或多个端点通信。这些端点可以由服务器、分布式计算系统、流处理器等提供服务。内容分发网络(cdn)也可以提供与电子设备的通信。例如,除了典型的服务器响应之外,服务器还可以提供或指示用于内容传递网络(cdn)的数据,以供电子设备在稍后时间等待下载,诸如电子设备的后续活动。因此,数据可以作为系统的一部分或与系统分开直接从服务器或其他基础结构(诸如分布式基础结构或cdn)发送。
[0248]
通常,存储介质可以包括以下各项的任一项或某种组合:半导体存储器设备,诸如动态或静态随机存取存储器(dram或sram)、可擦可编程只读存储器(eprom)、电可擦可编程只读存储器(eeprom)和闪存;磁盘,诸如固定磁盘、软盘和可移除磁盘;另一磁性介质,其包括磁带;光学介质,诸如光盘(cd)或数字视盘(dvd);或其他类型的存储设备。注意,可以在一个计算机可读存储介质或一个机器可读存储介质上提供上文所讨论的指令,或备选地,可以在分布在具有可以多个节点的大型系统中的多个计算机可读存储介质或机器可读存储介质上提供上文所讨论的指令。这样的一个或多个计算机可读存储介质或机器可读存储介质被认为是物品(或制品)的一部分。物品或制品可以是指任何制造的单个部件或多个部件。一个或多个存储介质可以位于运行机器可读指令的机器中,也可以位于远程站点,可以通过网络从该远程站点下载机器可读指令以供执行。
[0249]
在前面的描述中,对许多细节进行了阐述以提供对本文中所公开的主题的理解。
然而,可以在没有这些细节中的一些细节的情况下实践实现方式。其他实现方式可以包括对上文所讨论的细节的修改和变化。意图是所附权利要求覆盖这些修改和变化。
[0250]
附录a
[0251]
[0252]
[0253][0254]
2:单个bpf对((2~5.5)+(5.5-9)hz)的训练数据
[0255]
附录b
[0256]
[0257]
[0258]
[0259]
[0260][0261]
表3:三个bpf对的训练数据
[0262]
附录c
[0263]
[0264]
[0265]
[0266]
[0267][0268]
表4:训练结果
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1