一种多时段高维投影机组组合模型的构建方法和装置与流程
[0001]
本发明属于计算机技术领域,尤其涉及一种多时段高维投影机组组合模型的构建方法和装置。
背景技术:
[0002]
能源是现代社会的血液,是人类社会生存和发展的重要物质基础。然而,化石能源的大量消耗也导致能源短缺、环境污染等问题愈加严重。电能作为我国社会生产和生活的重要能源消费形式,在能源消费总量中占据的比重较大。然而,由于火力发电需要消耗大量的化石能源,并产生大量的二氧化碳等温室气体,使得电力行业成为了化石能源的主要“消费者”和温室气体的主要“生产者”。在此背景下,使用可再生能源替代化石能源进行发电和提高能源的利用效率是缓解能源紧张、改善环境质量的重要措施。然而,可再生能源受天气等不确定因素影响较大,提高其利用率仍有许多技术难点要解决,所以当下的最为有效的手段是提高化能源的利用效率。因此,优化火力发电机组的调度计划,对减少化石能源的使用和温室气体的排放具有十分重要的意义。
[0003]
优化发电机组的调度计划,就是在保证电力系统安全运行的前提下,以总发电费用最少或者其它需求为目标优化发电机组的启停和出力计划。为了便于研究,人们根据数学规划理论将发电机组调度计划的优化问题转化为一类混合整数规划(mixed integer programming,mip)问题,即机组组合(the unit commitment,uc)问题。然而,uc问题是一种具有非凸、高维和离散等特性的混合整数非线性规划(mixed integer nonlinear programming,minlp)问题,求解十分困难。
[0004]
因此,目前迫切需要一种计算效率高的uc模型,用于控制和调度电网发电资源,同时满足机组完成合同电量的实际需求,达到资源优化配置和节能减排的目标。
技术实现要素:
[0005]
本发明实施例的目的在于提供一种多时段高维投影机组组合模型的构建方法,旨在解决现有的uc模型求解困难,计算效率低,不能同时满足机组完成合同电量的实际需求,从而达到资源优化配置和节能减排的目标的问题。
[0006]
本发明实施例是这样实现的,一种多时段高维投影机组组合模型的构建方法,所述方法包括:
[0007]
采集电力系统发电机机组的基础数据,所述基础数据包括发电机机组的运行特性数据、负荷预测数据以及各时段的旋转备用数据;
[0008]
利用变量投影技术将电机机组功率变量以及与其相关的参数进行投影,得到投影后的电机机组功率变量以及与其相关的参数,其中投影区间为[0,1];
[0009]
根据所述基础数据、投影后的电机机组功率变量以及与其相关的参数以及电机机组在运行、启动和关机三个时段内单个机组的所有运行状态变量,构建多时段高维投影机组组合模型。
[0010]
本发明实施例的另一目的在于提供一种多时段高维投影机组组合模型的构建装置,所述装置包括:
[0011]
数据采集单元,用于采集电力系统发电机机组的基础数据,所述基础数据包括发电机机组的运行特性数据、负荷预测数据以及各时段的旋转备用数据;
[0012]
变量投影单元,用于利用变量投影技术将电机机组功率变量以及与其相关的参数进行投影,得到投影后的电机机组功率变量以及与其相关的参数,其中投影区间为[0,1];以及模型构建单元,用于根据所述基础数据、投影后的电机机组功率变量以及与其相关的参数以及电机机组在运行、启动和关机三个时段内单个机组的所有运行状态变量,构建多时段高维投影机组组合模型。
[0013]
本发明实施例提供的多时段高维投影机组组合模型的构建方法,通过将传统电力系统uc模型中的机组出力变量由半连续变量转化为连续变量,使uc模型中的出力约束式的数量至少减少了一半,降低了机组模型求解的复杂度;并且利用投影技术对目标函数进行变化,使目标函数值域范围更广;基于cplex12.7.1工具的模型求解表明,采用本发明的构建方法构建得到的三时段机组组合模型,在目标函数无分段线性化的情况下模型的计算效率至少提高了10%,在目标函数分段线性化的情况下,设置求解的精度为0.5%,模型的计算效率至少提高了20%。可见,本发明所构建得到的多时段高维投影机组组合模型的求解难度降低,且计算效率高,可用于控制和调度电网发电资源,能够同时满足机组完成合同电量的实际需求,以达到资源优化配置和节能减排的目标。
附图说明
[0014]
图1为本发明实施例提供的一种多时段高维投影机组组合模型的构建方法的流程图;
[0015]
图2为本发明实施例提供的一种多时段高维投影机组组合模型的构建装置的结构框图;
[0016]
图3为本发明实施例提供的多时段高维投影机组组合模型的构建装置中的模型构建单元的结构框图。
具体实施方式
[0017]
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
[0018]
本发明实施例提供的多时段高维投影机组组合模型的构建方法,通过将传统电力系统uc模型中的机组出力变量由半连续变量转化为连续变量,使uc模型中的出力约束式的数量至少减少了一半,降低了机组模型求解的复杂度;并且利用投影技术对目标函数进行变化,使目标函数值域范围更广,且经验证,本发明构建的模型在目标函数无分段线性化的情况下模型的计算效率至少提高了10%,在目标函数分段线性化的情况下,设置求解的精度为0.5%,模型的计算效率至少提高了20%。
[0019]
图1示出了本发明实施例提供的一种多时段高维投影机组组合模型的构建方法的实现流程。为了便于说明,仅示出了与本发明实施例相关的部分,详述如下:
[0020]
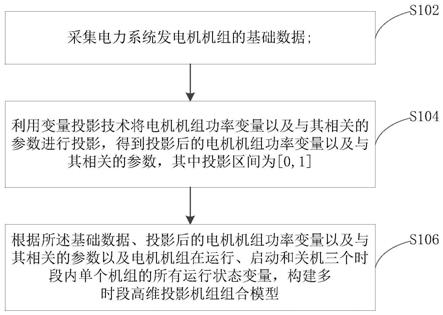
如图1所示,本发明实施例提供了一种多时段高维投影机组组合模型的构建方法,包括步骤s102、步骤s104和步骤s106。
[0021]
步骤s102,采集电力系统发电机机组的基础数据,所述基础数据包括发电机机组的运行特性数据、负荷预测数据以及各时段的旋转备用数据。
[0022]
步骤s104,利用变量投影技术将电机机组功率变量以及与其相关的参数进行投影,得到投影后的电机机组功率变量以及与其相关的参数,其中投影区间为[0,1]。
[0023]
在本发明实施例中,利用变量投影技术将机组功率变量投影到区间[0,1]。机组i在t时段的发电功率p
i,t
是一个半连续变量,即其中p
i
表示机组i的出力下界,表示机组i的出力上界。现令对功率变量p
i,t
进性投影得到且为了便于理解,可以将看作为机组i在t时段的出力在中所占的比例。同时,其他与机组功率相关的参数也需要投影,如:其中,p
up,i
和p
down,i
分别表示机组i向上或向下爬坡的限制,p
start,i
和p
shut,i
分别表示机组i开启或关闭的最小功率。
[0024]
步骤s106,根据所述基础数据、投影后的电机机组功率变量以及与其相关的参数以及电机机组在运行、启动和关机三个时段内单个机组的所有运行状态变量,构建多时段高维投影机组组合模型。
[0025]
在本发明实施例中,电机机组在运行、启动和关机三个时段内单个机组的所有运行状态变量之间的关系如下表1所示。
[0026]
表1
[0027][0028]
其中,u
i,t
表示机组i在t时段的运行状态(0表示关机,1表示开机),s
i,t
表示机组i在t时段的启动状态(1表示机组出现由关机到开机的状态转变,0表示其他情况),d
i,t
表示t时段机组i关机状态(1表示机组出现由开机到关机的状态转变,0表示其他情况)。由于表1仅展示单个机组的状态变量,故变量中的机组号i被省略。这八类0-1变量表示机组i在t-1、t和t+1三个时段的八种不同的状态,例如:若u
i,t-1
=u
i,t
=u
i,t+1
=0,则
否则,若u
i,t-1
=u
i,t
=0,u
i,t+1
=1,则否则,同时,需要注意的是,由于表1仅展示单个机组的状态变量,故变量中的机组号i被省略。
[0029]
本发明实施例提供的多时段高维投影机组组合模型的构建方法,通过将传统电力系统uc模型中的机组出力变量由半连续变量转化为连续变量,使uc模型中的出力约束式的数量至少减少了一半,降低了机组模型求解的复杂度;并且利用投影技术对目标函数进行变化,使目标函数值域范围更广;基于cplex12.7.1工具的模型求解表明,采用本发明的构建方法构建得到的三时段机组组合模型,在目标函数无分段线性化的情况下模型的计算效率至少提高了10%,在目标函数分段线性化的情况下,设置求解的精度为0.5%,模型的计算效率至少提高了20%。可见,本发明所构建得到的多时段高维投影机组组合模型的求解难度降低,且计算效率高,可用于控制和调度电网发电资源,能够同时满足机组完成合同电量的实际需求,以达到资源优化配置和节能减排的目标。
[0030]
在本发明实施例中,上述步骤s106包括:
[0031]
根据所述基础数据、投影后的电机机组功率变量以及与其相关的参数以及电机机组在运行、启动和关机三个时段内单个机组的所有运行状态变量,构建所述多时段高维投影机组组合模型中的目标函数;确定所述多时段高维投影机组组合模型中的所述目标函数的约束条件。
[0032]
在本发明实施例中,基于机组的实际运行需求利用新状态变量系统地推导出三时段内的机组出力上界约束和爬坡约束的理想表达形式。根据机组的实际运行要求,分别得到下表2、表3和表4的数据。
[0033]
表2三时段单机组出力上界
[0034][0035][0036]
表3三时段单机组上爬坡上限
[0037][0038]
表4三时段单机组下爬坡上限
[0039][0040][0041]
根据表1和表2可知,在t时段机组的状态变量与功率上界之间存在如下线性关系:
[0042][0043]
即,
[0044][0045]
根据表1中各变量之间的关系将和消去,得到
[0046][0047]
由于以上式子是根据机组在t时段的实际运行要求推导而成,因此该式子是一个十分理想的机组出力上界约束表达式。根据以上思路,可以推导出机组在t-1和t+1时段的
功率上界约束的理想表达式。同样,三时段的机组上爬坡限制约束的理想表达式也可以按照上述思路得出。
[0048]
利用新状态变量与其他状态变量之间的关系消除新状态变量以提升模型的简洁性。例如,根据表1和表2,机组在t时段的上界约束表达式中的可以被消去,并得到如下表达式:
[0049][0050][0051]
根据表1和表3可知,在机组的状态变量与上爬坡上限之间存在如下线性关系:
[0052][0053]
即
[0054][0055]
同样,由表1可知,和可以消去,可得
[0056][0057]
同样也可以推导出机组其他时段的下爬坡约束(和)的表达式。
[0058]
根据表1和表4可知,在机组的状态变量与下爬坡上限之间存在如下线性关系:
[0059][0060]
即
[0061]
根据以上思路和可以消去,
[0062][0063]
同样也可以推导出机组其他时段的上下爬坡约束(同样也可以推导出机组其他时段的上下爬坡约束(和)的表达式。
[0064]
利用新状态变量与其他状态变量之间的关系消除新状态变量以提升模型的简洁性。根据表1可知,
[0065][0066][0067][0068]
由此,机组出力上界约束:
[0069][0070][0071][0072][0073][0074][0075][0076][0077]
其中,
[0078]
机组出力下界约束:
[0079]
向上爬坡约束:
[0080][0081]
[0082][0083][0084][0085][0086][0087][0088]
向下爬坡约束:
[0089][0090][0091][0092]
[0093][0094][0095][0096]
其中,
[0097]
在构建本发明的多时段高维投影机组组合模型中,还需要加入初始状态约束、机组开机费用约束、最小启/停约束、状态约束、系统旋转热备用约束和功率平衡约束;同时,需要加入二次目标函数。
[0098]
其中,与本发明相关的约束条件如下:
[0099]
机组状态约束:s
i,t-d
i,t
=u
i,t-u
y,t-1
,其中,s
i,t
表示机组i在t时刻开机状态(1表示机组出现由关机到开机的状态转变,0表示其他情况),d
i,t
表示t时段机组i关机状态(1表示机组出现由开机到关机的状态转变,0表示其他情况)。
[0100]
最小启停时间约束包括开机时间约束和关机时间约束。
[0101]
开机时间约束:
[0102]
关机时间约束:
[0103]
上述约束中,其中表示机组i在时刻开机。
[0104]
机组初始启动状态,构建二类状态变量的机组初始状态约束:u
i,t
=u
i,0
,t∈[1,...,u
i
+l
i
],上述约束中,u
i
=[min[t,u
i,0
(t
on,i-t
i,0
)]]
+
,l
i
=[min[t,(1-u
i,0
)(t
off,i
+t
i,0
)]]
+
。其中,t表示调度总时段数,t
on,i
表示机组i的最小开机时间,t
off,i
表示机组i的最小停机时间,u
i,0
表示机组i的初始状态,t
i,0
表示机组i初始时已经运行或停机的时间,u
i
表示机组i在初始时刻仍需运行时间,l
i
表示机组i在初始时刻仍需停机时间。
[0105]
根据负荷预测数据和旋转备用数据,构建机组旋转备用约束如下:其中i表示机组下标,t表示时段下标,n表示机组总数,u
i,t
表示机组i在t时刻的运行状态,表示机组i的出力上界,p
d,t
表示t时段时电力系统负荷,r
t
表示t时段电力系统所需旋转备用值。
[0106]
根据机组组合基础数据和投影的机组出力连续变量,建立机组功率平衡约束:
其中p
i
表示机组i的出力下界。
[0107]
利用机组冷热启动费用差异特性,建立机组启动费用约束:
[0108][0109]
上述表达式中,若t-t
off,i-t
cold,i-1≤0且[-t
i,0
]
+
<|t-t
off,i-t
cold,i-1|+1,则f
′
init,i,t
=1,否则f
′
init,i,t
=0;其中表示机组i在t时刻热启动费用超出的部分,且c
hot,i
表示机组i的热启动费用,c
cold,i
表示机组i的冷启动费用,t
cold,i
表示计算机组i冷启动时间,f
′
init,i,t
表示机组i在t时刻计及热启动费用超出的部分。
[0110]
结合启动费用约束,建立二类状态变量机组模型的目标表达式如下:
[0111][0112]
表达式中表达式中和其中f
c
是优化目标,表示机组i的出力成本,即机组燃料费用,α
i
,β
i
,γ
i
表示机组i的二次燃料费用函数系数,表示机组i进行投影变换的二次燃料费用函数系数,表示机组i在t时刻热启动费用超出的部分,c
hot,i
表示机组i的热启动费用。
[0113]
经过上述步骤之后,构建得到本发明实施例提供的多时段高维投影机组组合模型的目标函数:
[0114]
其中,所述目标函数中的约束条件如下:
[0115]
(1)机组出力约束:
[0116][0117][0118][0119][0120][0121]
[0122][0123][0124][0125]
其中,p
i,t
表示机组i在t时刻的出力大小,表示机组i在t时刻的出力大小,p
up,i
和p
down,i
分别表示机组i向上或向下爬坡的限制,p
start,i
和p
shut,i
分别表示机组i开启或关闭的最小功率,
[0126]
(2)功率平衡约束:
[0127][0128]
(3)旋转备用约束:
[0129][0130]
(4)爬坡速率约束:
[0131][0132][0133][0134][0135]
[0136][0137][0138][0139][0140][0141][0142][0143][0144][0145]
[0146]
其中,[
·
]
+
表示max(0,
·
),p
i,t
表示机组i在t时刻的出力大小,表示机组i在t时刻的出力大小,p
up,i
和p
down,i
分别表示机组i向上或向下爬坡的限制,p
start,i
和p
shut,i
分别表示机组i开启或关闭的最小功率,表示机组i的出力上界,p
i
表示机组i的出力下界,u
i,0
表示机组i的初始状态,t
i,0
表示机组i初始时已经运行或停机的时间,u
i,t
表示机组i在t时刻的运行状态(1表示机组处于运行状态,0表示停机状态),s
i,t
表示机组i在t时刻开机状态(1表示机组出现由关机到开机的状态转变,0表示其他情况),d
i,t
表示t时段机组i关机状态(1表示机组出现由开机到关机的状态转变,0表示其他情况)。
[0147]
(5)机组状态约束:
[0148]
u
i,t-u
i,t-1
≤s
i,t
[0149]
(5)机组初始状态约束:u
i,t
=u
i,0
,t∈[1,...,u
i
+l
i
],上述约束中,u
i
=[min[t,u
i,0
(t
on,i-t
i,0
)]]
+
,l
i
=[min[t,(1-u
i,0
)(t
off,i
+t
i,0
)]]
+
。
[0150]
(7)机组最小启停时间约束:
[0151]
开机时间约束:
[0152]
关机时间约束:
[0153]
(8)机组启动费用约束:
[0154][0155]
上述约束公式中,f
c
是优化目标,表示机组i的出力成本,即机组燃料费用,i表示机组下标,t表示时段下标,n表示机组总数,t表示调度总时段数,α
i
,β
i
,γ
i
表示机组i的二次燃料费用函数系数,表示机组i进行投影变换的二次燃料费用函数系数,c
hot,i
表示机组i的热启动费用,c
cold,i
表示机组i的冷启动费用,t
on,i
表示机组i的最小开机时间,t
off,i
表示机组i的最小停机时间,t
cold,i
表示计算机组i冷启动时间,f
′
init,i,t
表示机组i在t时刻计及热启动费用超出的部分,[
·
]
+
表示max(0,
·
),表示机组i的出力上界,p
i
表示机组i的出力下界,表示机组模型的机组i在t时刻的出力大小,p
d,t
表示t时段时电力系统所需负荷,r
t
表示t时段电力系统所需旋转备用值,p
up,i
表示机组i的向上爬坡速率,表示机组i进行投影变换后的向上爬坡速率,p
down,i
表示机组i的向下爬坡速率,表示机组i进行投影变换后的向下爬坡速率,p
start,i
表示机组i开机时的最小出力值,表示机组i进行投影变换后的在开机时的最小出力值,p
shut,i
表示机组i关机时的最大出力值,
表示机组i进行投影变换后的在关机时的最大出力值,u
i,0
表示机组i的初始状态,t
i,0
表示机组i初始时已经运行或停机的时间,u
i,t
表示机组i在t时刻的运行状态,s
i,t
表示机组i在t时刻开机,表示机组i在t时刻热启动费用超出的部分,表示机组i在时刻开机。
[0156]
综上所述,本发明实施例提供的多时段高维投影机组组合模型的构建方法,通过将传统电力系统uc模型中的机组出力变量由半连续变量转化为连续变量,使传统的uc模型中的出力约束式的数量至少减少了一半,降低了机组模型求解的复杂度;并利用投影技术对目标函数进行变化,使目标函数值域范围更广;新构建的爬坡速率约束减少了冗余约束,并提出了一种更紧凑的三时段机组组合出力约束和爬坡约束。另外,基于cplex12.7.1工具对模型进行求解表明,本发明的三时段机组组合模型,在目标函数无分段线性化的情况下模型的计算效率至少提高了10%,在目标函数分段线性化的情况下,设置求解的精度为(0.5%),模型的计算效率至少提高了20%。因此,本发明所构建得到的多时段高维投影机组组合模型的求解难度降低,且计算效率高,可用于控制和调度电网发电资源,能够同时满足机组完成合同电量的实际需求,以达到资源优化配置和节能减排的目标。
[0157]
以下通过具体的实例来证明本发明构建得到的模型的可行性。
[0158]
采集电力系统发电机机组的基础数据,包括发电机机组的运行特性数据、负荷预测数据如下表5、6、7。
[0159]
表5发电机数据(一)
[0160][0161]
表6发电机数据(二)
[0162][0163]
表7各时段负荷
[0164]
时段有功负荷(mw)1178.692168.453161.844157.835158.166163.69
7176.868198.219209.6710223.5411233.1812240.8013247.0314248.4715253.8316270.9017290.1218251.6819250.8920242.1021242.0522231.6823198.0724190.69
[0165]
各时段的旋转备用数据为所有机组总功率的10%。
[0166]
按照本发明的上述建模步骤,建立出多时段高维投影机组组合模型,并经基于cplex12.7.1工具的模型求解表明,采用本发明的构建方法构建得到的三时段机组组合模型,在目标函数无分段线性化的情况下模型的计算效率至少提高了10%,在目标函数分段线性化的情况下,设置求解的精度为0.5%,模型的计算效率至少提高了20%。
[0167]
图2是本发明实施例提供的一种多时段高维投影机组组合模型的构建装置的结构框图,为了便于说明,图中仅示出与本发明实施例相关的部分,详述如下:
[0168]
参见图2,本发明实施例提供的多时段高维投影机组组合模型的构建装置包括数据采集单元210、变量投影单元220和模型构建单元230。
[0169]
数据采集单元210,用于采集电力系统发电机机组的基础数据,所述基础数据包括发电机机组的运行特性数据、负荷预测数据以及各时段的旋转备用数据。
[0170]
变量投影单元220,用于利用变量投影技术将电机机组功率变量以及与其相关的参数进行投影,得到投影后的电机机组功率变量以及与其相关的参数,其中投影区间为[0,1]。
[0171]
模型构建单元230,用于根据所述基础数据、投影后的电机机组功率变量以及与其相关的参数以及电机机组在运行、启动和关机三个时段内单个机组的所有运行状态变量,构建多时段高维投影机组组合模型。
[0172]
本发明实施例提供的多时段高维投影机组组合模型的构建装置,通过将传统电力系统uc模型中的机组出力变量由半连续变量转化为连续变量,使uc模型中的出力约束式的数量至少减少了一半,降低了机组模型求解的复杂度;并且利用投影技术对目标函数进行变化,使目标函数值域范围更广;基于cplex12.7.1工具的模型求解表明,采用本发明的构
建方法构建得到的三时段机组组合模型,在目标函数无分段线性化的情况下模型的计算效率至少提高了10%,在目标函数分段线性化的情况下,设置求解的精度为0.5%,模型的计算效率至少提高了20%。可见,本发明所构建得到的多时段高维投影机组组合模型的求解难度降低,且计算效率高,可用于控制和调度电网发电资源,能够同时满足机组完成合同电量的实际需求,以达到资源优化配置和节能减排的目标。
[0173]
图3是本发明实施例提供的一种模型构建单元的结构框图,为了便于说明,图中仅示出与本发明实施例相关的部分,详述如下:
[0174]
所述模型构建单元230包括目标函数构建模块231和约束条件确定模块232。
[0175]
目标函数构建模块231,用于根据所述基础数据、投影后的电机机组功率变量以及与其相关的参数以及电机机组在运行、启动和关机三个时段内单个机组的所有运行状态变量,构建所述多时段高维投影机组组合模型中的目标函数。
[0176]
约束条件确定模块232,用于确定所述多时段高维投影机组组合模型中的所述目标函数的约束条件。
[0177]
关于上述实施例中的装置,其中各个模块执行操作的具体方式已经在有关该方法的实施例中进行了详细描述,此处将不做详细阐述说明。
[0178]
应该理解的是,虽然本发明各实施例的流程图中的各个步骤按照箭头的指示依次显示,但是这些步骤并不是必然按照箭头指示的顺序依次执行。除非本文中有明确的说明,这些步骤的执行并没有严格的顺序限制,这些步骤可以以其它的顺序执行。而且,各实施例中的至少一部分步骤可以包括多个子步骤或者多个阶段,这些子步骤或者阶段并不必然是在同一时刻执行完成,而是可以在不同的时刻执行,这些子步骤或者阶段的执行顺序也不必然是依次进行,而是可以与其它步骤或者其它步骤的子步骤或者阶段的至少一部分轮流或者交替地执行。
[0179]
本领域普通技术人员可以理解实现上述实施例方法中的全部或部分流程,是可以通过计算机程序来指令相关的硬件来完成,所述的程序可存储于一非易失性计算机可读取存储介质中,该程序在执行时,可包括如上述各方法的实施例的流程。其中,本申请所提供的各实施例中所使用的对存储器、存储、数据库或其它介质的任何引用,均可包括非易失性和/或易失性存储器。非易失性存储器可包括只读存储器(rom)、可编程rom(prom)、电可编程rom(eprom)、电可擦除可编程rom(eeprom)或闪存。易失性存储器可包括随机存取存储器(ram)或者外部高速缓冲存储器。作为说明而非局限,ram以多种形式可得,诸如静态ram(sram)、动态ram(dram)、同步dram(sdram)、双数据率sdram(ddrsdram)、增强型sdram(esdram)、同步链路(synchlink)dram(sldram)、存储器总线(rambus)直接ram(rdram)、直接存储器总线动态ram(drdram)、以及存储器总线动态ram(rdram)等。
[0180]
以上所述实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
[0181]
以上所述实施例仅表达了本发明的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对本发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。因此,本发明专利的保护范围应以所附权利要求为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1