基于抗差非线性高斯-赫尔默特模型的点云拟合方法与流程
[0001]
本发明属于计算机视觉领域,具体涉及一种基于抗差非线性高斯-赫尔默特(gauss-helmert)模型的点云拟合方法。
背景技术:
[0002]
三维激光扫描技术已被广泛应用于工业设计、土木工程及建筑物变形监测等领域。三维点云数据集合中包含大量的表面特征,这些特征可以被用于3d建模以及在建模中简化数据等,因此,三维点云精确的平面拟合具有非常重要的意义。由于设备精度的限制、光照的影响、目标物表面材料的反射以及扫描作业时的外界干扰(如行人和车辆)等原因,使得获取的点云数据中总会不可避免的产生错误点和差点,从而影响建模的精度。点云拟合的目的是根据扫描点集中的点云匹配出特定的曲面模型,求取出最佳模型参数,使点云子集合与模型参数之间达到高度吻合的目的。
[0003]
针对点云拟合,国内外学者进行了大量的研究,但大部分研究方法通常局限于粗差较少的点云数据拟合,最常用的方法有最小二乘法、整体最小二乘法、特征值法和ransac算法等,其中效果比较好的是整体最小二乘法和ransac算法,这两种算法依然都具有稳健性不强的缺点,前者不适用于异常点较多误差较大的情况,后者的缺点是限定迭代次数使得拟合结果可能不是最优解,甚至可能是错误结果。另外,ransac算法主要适用于等精度观测,是一种粗略的粗差处理方法,在一定程度上限制了点云拟合的精度。
技术实现要素:
[0004]
发明目的:为解决上述问题,本发明提供了一种基于抗差非线性高斯-赫尔默特模型的点云拟合方法,能进行任意角度、包含大量粗差的点云数据拟合,提高了参数求解的精度,增强了点云拟合的稳健性。
[0005]
技术方案:本发明所述的一种基于抗差非线性高斯-赫尔默特模型的点云拟合方法,包括以下步骤:
[0006]
(1)对预先获取的被测物体的三维点云数据进行预处理;
[0007]
(2)基于fpfh的点云特征点提取算法对预处理后的点云进行特征点提取;
[0008]
(3)通过改进的ransac算法选取粗差最小的有效点作为模型数据点;
[0009]
(4)将得到的模型数据点利用抗差非线性高斯-赫尔默特模型,求出拟合参数,直至点云的拟合精度满足预先设定的阈值。
[0010]
进一步地,所述步骤(1)包括以下步骤:
[0011]
(11)建立点云数据集p={p
i
∈r
3
∣i=1,2,3,
…
,n}的kd-tree结构;
[0012]
(12)对于点云中的每个点p
i
,定义所需近邻点参数k,建立k邻域,并计算其与最近k近邻点的平均距离:
[0013]
[0014][0015]
式中,d
ij
是点p
i
和点p
j
的空间距离,是点p
i
与其k近邻点的平均距离;
[0016]
(13)计算点云集中所有点的k近邻点平均距离的平均距离和其标准差d
std
:
[0017][0018]
(14)计算当前p
i
与k近邻点的平均距离是否大于设定的阈值l,当时,删除点p
i
;当时,保留点p
i
:
[0019][0020]
式中,σ为计算系数,一般根据被测点云数据的分布进行取值;
[0021]
(15)将完成大尺度离群点去除的点云,利用dbscan密度聚类算法完成小尺度离群点去噪:初始化邻域eps和阈值n
eps,min
并建立点云的kd-tree和k邻域数据结构;
[0022]
(16)随机选择点p
i
,通过eps和n
eps,min
判断其是否为核心点,遍历所有点,找到点p
i
的所有密度可达对象,通过密度连接得到小尺度去噪离群点后的点云数据。
[0023]
进一步地,所述步骤(2)包括以下步骤:
[0024]
(21)根据扫描的点云模型数据排列特点,采用主成分分析法估算法向向量,计算点云的fpfh值;
[0025]
(22)用fpfh在各子区间的均值代替非特征点的fpfh各区间的值,引入点云模型fpfh各区间的均值,记为mfpfh,根据fpfh在各子区间的均值与均值的欧式距离提取初始特征点;
[0026]
(23)通过判断特征点临近点夹角的方法对特征点进行优化,再通过判断点云邻近投影点相邻向量夹角大小的方法来增强模型整体轮廓特征。
[0027]
进一步地,所述步骤(3)包括以下步骤:
[0028]
(31)在提取后的特征点云中,任意选取数个不共线的点,组成初始面,并计算点云到该初始面的距离d
i
;
[0029]
(32)选取阈值t=2σ
0
,σ
0
为点云到初始面模型距离的标准偏差,当d
i
>t时该点被当作异常点剔除,反之被当作有效数据保留;
[0030]
(33)重复(31)、(32),直至包含的有效点数量最多,停止迭代,选取粗差最小且含有效数据点数量最大的作为模型点。
[0031]
进一步地,所述步骤(4)包括以下步骤:
[0032]
(41)对步骤(3)得到的点云数据根据扫描时的测距误差、垂直角误差和水平角误差计算出严密的随机模型;
[0033]
(42)构造关于误差向量e和待定参数向量x的非线性gauss-helmert模型;
[0034]
(43)通过经典最小二乘引入初值x
0
,e
0
取0,采用泰勒级数将其线性化;
[0035]
(44)构造拉格朗日目标函数,对各变量求偏导数并令导数为零,求出误差向量e的具体表达式;
[0036]
(45)通过计算标准残差向量,并根据igg-权函数得到相应的权因子,再通过双因子模型得到相应的协因数,在准则下更新误差向量e和待定参数向量x的协因数阵;
[0037]
(46)重复步骤(44)-(45),直到停止迭代,输出拟合参数,ε
0
一般取10-10
。
[0038]
有益效果:与现有技术相比,本发明的有益效果:1、有效解决了原始点云数据量大、数据不完整,精度不高(包含大量离群点)以及参数求解复杂、稳健性不高的情况,通过改进后的ransac算法自动设置阈值提取模型数据点,避免在求解过程中陷入局部收敛;2、相比于传统的点云拟合方法,抗差非线性高斯-赫尔默特模型考虑所有观测误差的影响,是一种通用求参模型;将由几何关系(采集的数据点三维坐标与测距和测角的关系)导出的严格随机模型纳入拟合参数求解中;3、通过构造igg-权因子函数和双因子模型,顾及了随机模型和观测空间的影响,能有效剔除粗差,进一步提高点云拟合参数的精度。
附图说明
[0039]
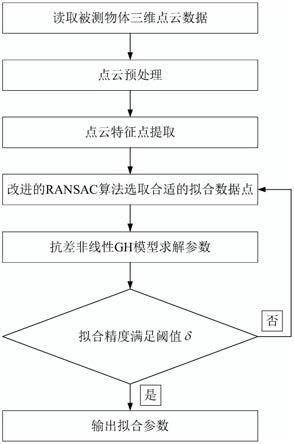
图1为本发明的流程图;
[0040]
图2为密度聚类示意图;
[0041]
图3为特征点提取前后的点云数据示意图;其中,(a)为提取前的点云数据,(b)为提取后的点云数据。
具体实施方式
[0042]
下面结合附图对本发明作进一步详细描述。
[0043]
本发明提供了一种基于抗差非线性高斯-赫尔默特模型的点云拟合方法,该方法首先对被测物体三维点云数据进行去噪、精简处理,随后对点云数据利用基于fpfh的点云特征点提取算法进行特征点提取,通过改进的ransac算法对提取后的数据选取合适的模型数据点,最后将得到的模型数据点利用抗差非线性高斯-赫尔默特模型,求出具有稳健性的拟合参数,直至点云的拟合精度满足阈值δ。如图1所示,具体包括以下步骤:
[0044]
步骤一,对被测物体的三维点云数据进行预处理。
[0045]
采用基于dbscan密度聚类离群噪声去除算法对点云进行去噪滤波处理,该方法先利用kd-tree原理完成大尺度离群点的去噪处理,然后利用dbscan密度聚类算法对小尺度离群点进行去噪处理。具体包括以下步骤:
[0046]
1)建立点云数据集p={p
i
∈r
3
∣i=1,2,3,
…
,n}的kd-tree结构;
[0047]
2)对于点云中的每个点p
i
,定义所需近邻点参数k,建立k邻域,并计算其与最近k近邻点的平均距离:
[0048][0049][0050]
式中,d
ij
是点p
i
和点p
j
的空间距离,是点p
i
与其k近邻点的平均距离。
[0051]
3)计算点云集所有点的k近邻点平均距离的平均距离和其标准差d
std
;
[0052][0053]
4)计算当前p
i
与k近邻点的平均距离是否大于设定的阈值l,当时,删除点p
i
;当时,保留点p
i
:
[0054][0055]
式中,σ为计算系数,一般根据被测点云数据的分布进行取值。
[0056]
5)将完成大尺度离群点去除的点云,利用dbscan密度聚类算法完成小尺度离群点去噪,首先初始化参数eps(邻域)和阈值n
eps,min
并建立点云的kd-tree和k邻域数据结构,其密度聚类示意图如图2所示。
[0057]
6)随机选择点p
i
,通过eps和n
eps,min
判断其是否为核心点,遍历点云数据集中的所有点,找到点p
i
的所有密度可达对象,通过密度连接得到小尺度去噪后的点云数据。
[0058]
步骤二,通过基于fpfh的点云特征点提取算法对预处理后的点云进行特征点提取。
[0059]
首先,根据扫描的点云模型数据排列特点,采用pca(principal component analysis,简称pca),即主成分分析法估算法向向量,计算点云的fpfh值。
[0060]
其次,用fpfh在各子区间的均值代替非特征点的fpfh各区间的值,引入点云模型fpfh各区间的均值,记为mfpfh,根据fpfh在各子区间的均值与均值的欧式距离提取初始特征点:
[0061][0062]
在此基础上计算每一点的fpfh各区间的值与mfpfh的欧式距离d:
[0063][0064]
式中,f代表直方图子区间个数;p
i
表示点云的fpfh,第i个区间的值;u
i
表示点云特征直方图中第i个区间的mfpfh值。若d超出阈值,则标记为特征点。
[0065]
最后,通过判断特征点临近点夹角的方法对特征点进行优化,再通过判断点云邻近投影点相邻向量夹角大小的方法来增强模型整体轮廓特征,从而保证提取的特征点不会丢失细节特征。
[0066]
步骤三,利用改进后的ransac算法选取合适的模型点。
[0067]
1)在提取后的特征点云中,任意选取数个不共线的点,组成初始面,并计算点云到该初始面的距离d
i
。
[0068]
2)选取阈值t=2σ
0
,σ
0
为点云到初始面模型距离的标准偏差。当d
i
>t时该点被当作异常点剔除,反之被当作有效数据保留。
[0069]
3)重复1),2)步骤,迭代多次,选取含有效数据点数量最大的作为模型点。
[0070]
改进后的ransac算法处利用点到初始平面模型距离的标准偏差来自动选取阈值
t。该方法能有效地剔除异常数据,保留有效数据,且能自动选择阈值,不需要人为设定其参数,图3为特征点提取前后的点云数据示意图,其中,图3(a)为提取前的点云数据,图3(b)为提取后的点云数据,“*”表示提取的模型数据点。
[0071]
步骤四,将得到的模型数据点利用抗差非线性高斯-赫尔默特模型,求出拟合参数,直至点云的拟合精度满足预先设定的阈值δ。
[0072]
点云拟合的实质是求解精度更高,稳健性更强的拟合参数。抗差非线性高斯-赫尔默特模型关于参数是非线性的,采用抗差估计算法进行参数估计,即通过构造双因子模型和igg-权函数。相比于传统的参数求解模型,抗差非线性高斯-赫尔默特模型充分考虑观测值的各项误差,是一种顾及随机模型和结构空间影响的严格粗差处理方法,抵御粗差的能力显著增强。具体包括以下步骤:
[0073]
(1)对步骤三得到的点云数据根据扫描时的测量斜距ρ以及激光束的水平角及竖直角θ误差计算目标点的三维坐标:
[0074][0075][0076]
z=ρsinθ
[0077]
对上式两边同时微分得:
[0078][0079]
故坐标点内协方差阵为:
[0080][0081]
式中,σ
ρ
、σ
θ
、分别为测距误差、垂直角误差和水平角误差,为仪器出厂自带的标称精度,σ
x2
、σ
y2
、σ
z2
为观测值x、y、z的方差,σ
xy
、σ
xz
、σ
yz
为观测值x、y、z之间的协方差。计算出所有数据点的协方差阵,按对角线排列在矩阵d中:
[0082][0083]
(2)构造关于误差向量e和待定参数向量x的非线性gauss-helmert模型:
[0084]
ψ(e,x)=h(l-e,x)=0
[0085]
上式中,l为观测向量,ψ和h均为可微的非线性向量函数。
[0086]
(3)通过经典最小二乘引入合适的初值x
0
,e
0
一般取0,采用泰勒级数将其线性化:
[0087]
ψ(e
0
,x
0
)+aδx+b(e-e
0
)=0
[0088]
式中,δx=x-x
0
为参数x的改正向量,此外,
[0089][0090]
(4)令向量w=-ψ(e
0
,x
0
)+be
0
,构造拉格朗日目标函数:
[0091]
φ=e
t
q-1
e-2λ
t
(be+aδx-w)
[0092]
对各变量求偏导数并令导数为零,求出误差向量的具体表达式:
[0093][0094]
式中,q是误差向量e的协因数,
[0095]
(5)通过计算各个观测值对应的标准化残差
[0096][0097]
式中,σ
0
表示单位权中误差,表示观测值第i个观测值残差向量的协因数。
[0098]
通过igg-函数得到相应的权因子r
ii
:
[0099][0100]
式中,r
ii
表示观测值第i点的权因子,k
0
和k
1
均为常数,k
0
一般取2.0~3.0,k
1
一般取4.5左右。
[0101]
由于igg iii函数的第三段为0,对应协因数因子的理论值应为无穷,为了方便实际计算,用一个常数c(10
10
)代替,这样在数值计算上完全能够满足要求。
[0102]
为满足准则,通过双因子模型求出协因数q,对协因数求逆得到
[0103]
(6)重复步骤(4)-(5),直到停止迭代,输出拟合参数,ε
0
一般取10-10
。
[0104]
双因子模型保持观测值间的原始相关性不变,抗差估计的加入,有效地将点云进行分层定权处理,通过多次迭代,有效降低淘汰段的小粗差对点云拟合的影响。利用igg-权函数求出未知数参数向量x,直至拟合精度满足阈值δ。若不满足,则继续执行步骤三至步骤四,满足阈值δ后,输出拟合参数。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1