一种水陆两栖飞机飞行品质适航符合性的评估方法与流程
[0001]
本发明属于飞机适航验证的技术领域,具体涉及一种水陆两栖飞机飞行品质适航符合性的评估方法。
背景技术:
[0002]
飞机飞行品质的适航符合性,关系到飞机的操纵性和稳定性是否优良、驾驶员对飞机的操纵感觉以及飞机的飞行安全性。因此,在飞机设计方案完成时,通常会通过仿真确定飞机飞行品质的适航符合性。目前针对常规陆基飞机,已有比较成熟的飞行力学飞行仿真模型进行飞机气动力相关的适航符合性的判断。
[0003]
水陆两栖飞机是一种既可以利用机身下半部分的船体实现水面起降,也可以利用起落架在陆上机场完成地面起降的新型飞机,具有广泛的应用场景和极大的研究意义。但是,水陆两栖飞机在进行适航符合性研究时,无法直接采用已有的针对常规陆基飞机的飞行力学飞行仿真模型。
[0004]
因此,现有技术缺少水陆两栖飞机的适航符合性评估方法。
技术实现要素:
[0005]
发明目的:提出一种水陆两栖飞机飞行品质适航符合性的评估方法,能够提供同时计算评估飞机在水面、陆上、空中运行过程中相关适航条款的符合性,提前识别设计方案中的不满足适航要求之处,解决水陆两栖飞机气动、水动设计方案的协调性问题。
[0006]
本发明提供一种飞机飞行品质适航符合性的评估方法,包括:
[0007]
根据水陆两栖飞机的设计方案,获取第一数据,所述第一数据包括:飞机船体、浮筒、起落架、机翼和各舵面的设计参数、重量重心惯矩数据;
[0008]
根据所述第一数据,以及水陆两栖飞机外力数学模型、水陆两栖飞机六自由度运动方程,得到计算结果,所述计算结果包括飞机在不同适航条款规定的运行状态取值组合下的运行参数;
[0009]
比较各适航条款下的运行参数和对应的适航条款对飞机的运行参数的要求,得到飞行品质适航符合性结论。
[0010]
可选的,所述水陆两栖飞机外力数学模型包括:
[0011]
水陆两栖飞机的水动力数学模型、起落架数学模型、气动力数学模型、发动机拉力数学模型和重力数学模型。
[0012]
可选的,所述飞机的运行参数包括:飞机飞行的速度、迎角、侧滑角、滚转角、俯仰角、偏航角、滚转角速度、俯仰角速度、偏航角速度、惯性轴系内的三维坐标、三轴过载。
[0013]
可选的,所述适航条款为基于民用航空规章及其专用条件、有人驾驶飞机(固定翼)飞行品质等规定的运行状态包括:重量重心、高度、速度、构型、水面操稳特性、水面最小操纵速度、水面抗侧风能力、汲水时的操稳特性、汲水时的最小操纵速度、地面操纵特性。
[0014]
可选的,所述方法还包括:
[0015]
在存在某一适航条款下的运行参数不符合适航条款对飞机的运行参数的要求时,对所述适航条款所涉及的飞机设计参数进行修正,得到修正后的水陆两栖飞机的设计方案;
[0016]
根据修正后的设计方案再次进行飞机飞行品质适航符合性的评估。
[0017]
可选的,所述水陆两栖飞机的水动力数学模型包括:船体模型、浮筒模型和水舵模型;
[0018]
所述船体模型用于指示不同的船体的设计参数、重量重心惯矩数据与船体所受到的水动力和水动力矩的映射关系;
[0019]
所述浮筒模型用于指示不同的浮筒的设计参数、重量重心惯矩数据与浮筒所受到的水动力和水动力矩的映射关系;
[0020]
所述水舵模型用于指示不同的水舵舵面的设计参数、重量重心惯矩数据与浮筒所受到的水动力和水动力矩的映射关系。
[0021]
可选的,所述水陆两栖飞机的起落架数学模型包括:机轮部件模型、缓冲支柱部件模型、起落架力和力矩至飞机重心的转换模型。
[0022]
可选的,所述计算结果包括:数值矩阵、曲线图片,所述方法还包括;
[0023]
将所述数值矩阵形式的计算结果以excel文档方式保存,将所述曲线图片形式的计算结果以word文档形式保存。
[0024]
可选的,所述存储的excel文档、word文档的文件名包括计算结果所对应的适航规章条款号以及运行状态取值组合信息。
[0025]
本发明的优点在于:本发明将水陆两栖飞机在水面、地面、空中的飞行品质评估工作系统化、集成化、专业化,型号研发工作中避免了不同方法和版本所造成统一性问题;同时采用的水陆两栖飞机飞行品质适航符合性的快速评估方法,进一步提高了设计迭代效率。
附图说明
[0026]
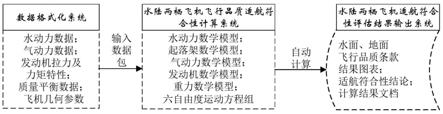
图1是本发明一实施例的水陆两栖飞机飞行品质适航符合性的评估方法的原理图;
[0027]
图2是本发明一实施例水陆两栖飞机水动力的输入状态变量、输出的水动力和力矩分量;
[0028]
图3是本发明一实施例水陆两栖飞机在起飞过程中的阻力峰、水平加速度。
[0029]
图4是本发明一实施例水陆两栖飞机在设计迭代过程中的应用流程图。
[0030]
图5是本发明一实施例水陆两栖飞机在设计迭代后在起飞过程中的阻力峰、水平加速度。
具体实施方式
[0031]
为使本发明实施的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行更加详细的描述。
[0032]
在附图中,所描述的实施例是本发明一部分实施例,而不是全部的实施例。下面通过参考附图描述的实施例是示例性的,旨在用于解释本发明,而不能理解为对本发明的限
制。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。下面结合附图对本发明的实施例进行详细说明。
[0033]
示例性的,如《有人驾驶飞机(固定翼)飞行品质》gjb185-86第11.2.7条“静水中起飞加速度”的适航要求为:“在水面中起飞时应具有良好的加速性。以正常起飞重量起飞,通过阻力峰时的飞机水平加速度不得小于0.1g。”[0034]
在某一水陆两栖飞机的设计方案中,飞机的船体设计参数为:船体长宽比10.6,船体舭宽为3.2m。所述船体长宽比在水陆两栖飞机所建议的8.5~15的范围之内。
[0035]
如图1所示,采用本发明提供的飞行品质适航符合性评估方法,获取上述飞机对应的水陆两栖飞机包括水动力数学模型在内的外力数学模型,将水陆两栖飞机外力数学模型代入水陆两栖飞机六自由度运动方程,得到该飞机在适航条款规定的运行状态取值组合下的运行参数。
[0036]
所述的水动力数学模型为包括:船体、浮筒的水动力和水动力矩,以及水舵操纵产生的偏航力矩。
[0037]
船体水动力和水动力矩的建立方法,是依据飞机船体在如图2所示的不同滑行速度、吃水深度、船体姿态(纵倾角、滚转角、侧滑角)的定常状态下,通过飞机船体的计算流体力学数值计算或水面滑行试验数据的参数辨识,获得船体在水面低速滑行与高速滑行断阶离水(或断阶接水)过程中所受到的水动力和水动力矩;所述的水动力,包括飞机船体在上述定常状态下对于全机水动力参考点的的水动升力、水动侧力、水动阻力;所述的水动力矩包括全机水动力参考点处所受到的水动俯仰力矩、水动滚转力矩、水动偏航力矩。
[0038]
所述的不同滑行速度,包括最大滑行速度v
max
(离水速度或接水速度,取大者)、0.8v
max
、0.65v
max
、0.5v
max
、0.38v
max
、0.25v
max
、0.1v
max
。在上述速度范围内,飞机船体的水动阻力会在个别速度点呈现出明显的“隆起”,也即水动阻力随空速变化的极大值点,水动阻力极大值点对应的速度点称之为阻力峰速度v
hump
。阻力峰速度v
hump
一般处于0.25v
max
~0.5v
max
之间,是水动力重要特征点,选取的滑行速度点根据实际情况需要在阻力峰速度v
hump
附近适当加密。
[0039]
浮筒的水动力和水动力矩的建立方法,计算的定常状态与船体相同,特别之处在于,只需输出浮筒对于全机水动力参考点的水动升力、水动阻力、水动滚转力矩、水动偏航力矩。水舵操纵产生的偏航力矩,是计算中低速滑行速度下水舵偏度与水动偏航力矩的关系。
[0040]
采用本发明提供的飞行品质适航符合性评估方法,如图3所示,得到飞机在适航条款gjb185-86第11.2.7条下通过阻力峰时的飞机水平加速度值为0.063g,但是,该条款要求通过阻力峰时的飞机水平加速度不得小于0.1g,因此,需要对飞机设计方案中船体的设计参数进行调节。
[0041]
按照如图4所示的设计优化流程,通过分析水陆两栖飞机在起飞功率情况下在通过阻力峰时的水平加速度的影响因素。当减小飞机船体舭宽至3m时,某水陆两栖飞机在条款要求的状态下的飞机水平加速度值为0.1346g,如图5所示,说明该水陆两栖飞机的船体舭宽设计参数的修正值在小于3m的情况下,才有可能使飞机保证满足适航条款的要求。
[0042]
最后需要指出的是:以上实施例仅用以说明本发明的技术方案,而非对其限制。尽
管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的精神和范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1