基于小波变换的动车齿轮箱漏油故障识别方法与流程
[0001]
本发明涉及故障识别方法。属于动车故障识别领域。
背景技术:
[0002]
动车的齿轮箱是动车转向架动力传动的关键部件,齿轮箱若发生漏油故障则会危及动车的行车安全,在以往的故障检测中,采用人工检查图像的方式进行故障检测。人工检修由于劳动强度大,可能造成漏检、错检的出现,影响行车安全。采用图像自动识别的方式可提高检测效率和稳定性。近几年,图像自动识别技术不断成熟。因而,采用图像自动识别技术进行齿轮箱漏油的故障识别,可以有效提高检测准确率。
技术实现要素:
[0003]
本发明是为了解决现有人工检测齿轮箱是否漏油的方式存在检测效率低、准确性差的问题。现提供基于小波变换的动车齿轮箱漏油故障识别方法。
[0004]
基于小波变换的动车齿轮箱漏油故障识别方法,该方法包括以下步骤:
[0005]
步骤1、获取动车底部图像,从动车底部图像中截取含有齿轮箱的图像;
[0006]
步骤2、采用小波域阈值分割算法从含有齿轮箱的图像中分割出齿轮箱轮廓图像;
[0007]
步骤3、采用小波域阈值分割算法从齿轮箱轮廓图像中分割出漏油区域图像;
[0008]
步骤4、计算漏油区域图像的面积,将漏油区域图像的面积与预设的面积阈值比较,若漏油区域图像的面积大于预设的面积阈值,则确定齿轮箱漏油,否则,则齿轮箱未漏油。
[0009]
优选地,步骤2中,采用小波域阈值分割算法从含有齿轮箱的图像中分割出齿轮箱轮廓图像,具体过程为:
[0010]
步骤21、根据含有齿轮箱的图像构建直方图,根据直方图确定对含有齿轮箱的图像进行分割的个数m,m为正整数;
[0011]
步骤22、对直方图进行j级小波分解,得到经过j级小波分解后的直方图中每个灰度值对应的分解系数,j的初始值等于1;
[0012]
步骤23、从得到的分解系数中选出满足分解条件的分解系数,每一个分解系数对应的灰度值为一个灰度阈值,判断选出的分解系数的个数是否大于等于m,如果是,则将分解系数的个数作为灰度阈值的个数,转入步骤24,如果否,j=j+1,则执行步骤22;
[0013]
步骤24、若步骤23得到的分解系数的个数等于m,则用m个分解系数对应的灰度阈值分别对m个分割区域进行二值化分割,得到由m个白色图像和m个黑色图像构成的二值化图像,若步骤23得到的分解系数的个数大于m,则对接近的灰度阈值取平均值,以保证获取m个灰度阈值,再用m个灰度阈值分别对m个分割区域进行二值化分割,得到由m个白色图像和m个黑色图像构成的二值化图像,
[0014]
步骤25、由m个白色图像构成齿轮箱轮廓图像。
[0015]
优选地,步骤22中,
[0016]
j分辨率下的直方图h
fj
(x)用哈尔尺度函数的伸缩与平移表示为:
[0017][0018]
式中,j=log2(d
m
),d
m
为直方图中的最大灰度值,n为分解系数的个数,h
f
(k)=|{(x,y):f(x,y)=k}|;k∈[0,d
m
],h
f
(k)表示f(x,y)中灰度值为k的像素的个数,|
···
|为计数操作,x为图像中每个像素的横坐标,y为图像中每个像素的纵坐标,f(x,y)为输入图像。
[0019]
优选地,步骤22中,分解系数{a
k
}的求取方法为:
[0020][0021]
式中,h
f
(x)为h
fj
(x)的多层表达曲线,{a
k
}={<h
f
,φ
j,k
>},{a
k
}为分解系数。
[0022]
优选地,步骤3中,采用小波域阈值分割算法从齿轮箱轮廓图像中分割出的漏油区域图像具体过程为:
[0023]
步骤31、根据齿轮箱轮廓图像构建直方图,根据直方图确定对含有齿轮箱轮廓图像进行分割的个数n,n为正整数;
[0024]
步骤32、对直方图进行j级小波分解,得到经过j级小波分解后的直方图中每个灰度值对应的分解系数,j的初始值等于1,;
[0025]
步骤33、从得到的分解系数中选出满足分解条件的分解系数,每一个分解系数对应的灰度值为一个灰度阈值,判断选出的分解系数的个数是否大于等于m,如果是,则将分解系数的个数作为灰度阈值的个数,转入步骤34,如果否,j=j+1,则执行步骤32;
[0026]
步骤34、若步骤33得到的分解系数的个数等于n,则用n个分解系数对应的灰度阈值分别对n个分割区域进行二值化分割,得到由n个白色图像和n个黑色图像构成的二值化图像,若步骤33得到的分解系数的个数大于n,则对接近的灰度阈值取平均值,以保证获取n个灰度阈值,再用n个灰度阈值分别对n个分割区域进行二值化分割,得到由n个白色图像和n个黑色图像构成的二值化图像,
[0027]
步骤35、由n个白色图像构成漏油区域图像。
[0028]
基于小波变换的动车齿轮箱漏油故障图像识别系统,该系统包括图像获取模块、一号分割模块、二号分割模块和判断模块,
[0029]
图像获取模块,用于获取动车底部图像,从动车底部图像中截取含有齿轮箱的图像;
[0030]
一号分割模块,用于采用小波域阈值分割算法从含有齿轮箱的图像中分割出齿轮箱轮廓图像;
[0031]
二号分割模块,用于采用小波域阈值分割算法从齿轮箱轮廓图像中分割出漏油区域图像;
[0032]
判断模块,用于计算漏油区域图像的面积,将漏油区域图像的面积与预设的面积阈值比较,若漏油区域图像的面积大于预设的面积阈值,则确定齿轮箱漏油,否则,则齿轮
箱未漏油。
[0033]
优选地,一号分割模块包括区域分割单元、一号小波分解单元、一号灰度阈值获取单元、一号二值化处理单元和齿轮箱轮廓图像获取单元,
[0034]
区域分割单元,用于根据含有齿轮箱的图像构建直方图,根据直方图确定对含有齿轮箱的图像进行分割的个数m,m为正整数;
[0035]
一号小波分解单元,用于对直方图进行j级小波分解,得到经过j级小波分解后的直方图中每个灰度值对应的分解系数,j的初始值等于1;
[0036]
一号灰度阈值获取单元,用于从得到的分解系数中选出满足分解条件的分解系数,每一个分解系数对应的灰度值为一个灰度阈值,判断选出的分解系数的个数是否大于等于m,如果是,则将分解系数的个数作为灰度阈值的个数,传送给一号二值化处理单元,如果否,j=j+1,则输送给一号小波分解单元;
[0037]
一号二值化处理单元,用于在分解系数的个数等于m时,则用m个分解系数对应的灰度阈值分别对m个分割区域进行二值化分割,得到由m个白色图像和m个黑色图像构成的二值化图像,若分解系数的个数大于m,则对接近的灰度阈值取平均值,以保证获取m个灰度阈值,再用m个灰度阈值分别对m个分割区域进行二值化分割,得到由m个白色图像和m个黑色图像构成的二值化图像;
[0038]
齿轮箱轮廓图像获取单元,用于由m个白色图像构成齿轮箱轮廓图像。
[0039]
优选地,构建直方图的过程为:
[0040]
j分辨率下的直方图h
fj
(x)用哈尔尺度函数的伸缩与平移表示为:
[0041][0042]
式中,j=log2(d
m
),d
m
为直方图中的最大灰度值,n为分解系数的个数,h
f
(k)=|{(x,y):f(x,y)=k}|;k∈[0,d
m
],h
f
(k)表示f(x,y)中灰度值为k的像素的个数,|
···
|为计数操作,x为图像中每个像素的横坐标,y为图像中每个像素的纵坐标,f(x,y)为输入图像。
[0043]
优选地,分解系数{a
k
}的求取方法为:
[0044][0045]
式中,h
f
(x)为h
fj
(x)的多层表达曲线,{a
k
}={<h
f
,φ
j,k
>},{a
k
}为分解系数。
[0046]
优选地,二号分割模块包括子图像分割单元、二号小波分解单元、二号灰度阈值获取单元、二号二值化处理单元和漏油区域图像获取单元,
[0047]
子图像分割单元,用于根据齿轮箱轮廓图像构建直方图,根据直方图确定对含有齿轮箱轮廓图像进行分割的个数n,n为正整数;
[0048]
二号小波分解单元,用于对直方图进行j级小波分解,得到经过j级小波分解后的直方图中每个灰度值对应的分解系数,j的初始值等于1;
[0049]
二号灰度阈值获取单元,用于从得到的分解系数中选出满足分解条件的分解系
数,每一个分解系数对应的灰度值为一个灰度阈值,判断选出的分解系数的个数是否大于等于n,如果是,则将分解系数的个数作为灰度阈值的个数,传送给二值化处理单元,如果否,j=j+1,则输送给一号小波分解单元;
[0050]
二号二值化处理单元,用于在分解系数的个数等于n时,则用n个分解系数对应的灰度阈值分别对n个分割区域进行二值化分割,得到由n个白色图像和n个黑色图像构成的二值化图像,若分解系数的个数大于n,则对接近的灰度阈值取平均值,以保证获取n个灰度阈值,再用n个灰度阈值分别对n个分割区域进行二值化分割,得到由n个白色图像和n个黑色图像构成的二值化图像;
[0051]
漏油区域图像获取单元,用于由n个白色图像构成漏油区域图像。
[0052]
本发明的有益效果为:
[0053]
本申请分别在动车轨道周围搭建高清成像设备,动车通过设备后,获取高清图像。通过先验知识截取含有齿轮箱的图像输入到小波域阈值分割算法中,分割出齿轮箱轮廓图像,并通过小波域阈值分割算法定位到白色的漏油区域图像,通过计算漏油区域图像的面积,判断齿轮箱是否发生漏油。对漏油的齿轮箱进行上传报警,工作人员根据识别结果进行相应的处理,保证列车安全运行。
[0054]
本申请利用图像自动识别的方式代替人工检测,提高检测效率、准确率。
[0055]
基于小波域的阈值分割算法分割齿轮箱,可以精确分割齿轮箱轮廓图像,并运用小波域阈值分割算法得到漏油区域图像,有较强的抗噪声性能,针对不同环境下的齿轮箱漏油可以提高分割准确率以及提高算法的稳定性。
附图说明
[0056]
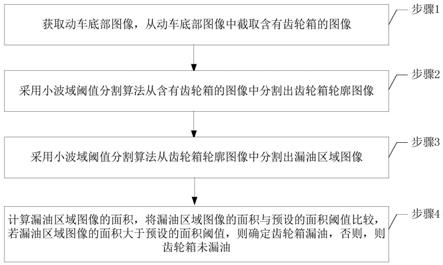
图1为基于小波变换的动车齿轮箱漏油故障识别方法的流程图。
具体实施方式
[0057]
需要特别说明的是,在不冲突的情况下,本申请公开的各个实现方式之间或实现方式中的特征之间可以相互组合。
[0058]
具体实施方式一:参照图1具体说明本实施方式,本实施方式的基于小波变换的动车齿轮箱漏油故障识别方法,该方法包括以下步骤:
[0059]
步骤1、获取动车底部图像,从动车底部图像中截取含有齿轮箱的图像;
[0060]
步骤2、采用小波域阈值分割算法从含有齿轮箱的图像中分割出齿轮箱轮廓图像;
[0061]
步骤3、采用小波域阈值分割算法从齿轮箱轮廓图像中分割出漏油区域图像;
[0062]
步骤4、计算漏油区域图像的面积,将漏油区域图像的面积与预设的面积阈值比较,若漏油区域图像的面积大于预设的面积阈值,则确定齿轮箱漏油,否则,则齿轮箱未漏油。
[0063]
本实施方式中,在动车轨道周围搭建高清成像设备,当动车通过后,通过设备获取动车底部的高清图像,图像为清晰的灰度图像。由于不同站点拍摄条件不同,设备拍摄图像存在差异,相机可能会受到雨水、泥渍等自然条件的影响,导致了获得的齿轮箱图像也存在差异。不同车型的齿轮箱形态又不尽相同。为了保证算法的适用性,需要将各站点在各种不同条件下不同车型的齿轮箱图像全部采集。通过先验知识,可以对齿轮箱部分进行粗定位,
并截取含有齿轮箱的图像。
[0064]
具体实施方式二:本实施方式是对具体实施方式一的基于小波变换的动车齿轮箱漏油故障图像识别方法作进一步说明,本实施方式中,步骤2中,采用小波域阈值分割算法从含有齿轮箱的图像中分割出齿轮箱轮廓图像,具体过程为:
[0065]
步骤21、根据含有齿轮箱的图像构建直方图,根据直方图确定对含有齿轮箱的图像进行分割的个数m,m为正整数;
[0066]
步骤22、对直方图进行j级小波分解,得到经过j级小波分解后的直方图中每个灰度值对应的分解系数,j的初始值等于1;
[0067]
步骤23、从得到的分解系数中选出满足分解条件的分解系数,每一个分解系数对应的灰度值为一个灰度阈值,判断选出的分解系数的个数是否大于等于m,如果是,则将分解系数的个数作为灰度阈值的个数,转入步骤24,如果否,j=j+1,则执行步骤22;
[0068]
步骤24、若步骤23得到的分解系数的个数等于m,则用m个分解系数对应的灰度阈值分别对m个分割区域进行二值化分割,得到由m个白色图像和m个黑色图像构成的二值化图像,若步骤23得到的分解系数的个数大于m,则对接近的灰度阈值取平均值,以保证获取m个灰度阈值,再用m个灰度阈值分别对m个分割区域进行二值化分割,得到由m个白色图像和m个黑色图像构成的二值化图像,
[0069]
步骤25、由m个白色图像构成齿轮箱轮廓图像。
[0070]
本实施方式中,例如,m的个数为3,所以,我们将齿轮箱的图像分割成3个区域图像,3个区域图像的灰度值范围分别为:(0,25),(25,35),(35,255),而步骤24得到的分解系数的个数为3,而3个分解系数对应的3个灰度阈值分别为20,30,40,那么,在(0,25)内小于20的灰度值都变为0(黑色),大于20小于25的都变为255(白色),在(25,35)内大于25小于30的都变为0,大于30小于35的都变为255,在(35,255)内,大于35小于40的都变为0,大于40的都变为255。而当步骤24得到的分解系数的个数为4时,m为3时,要将4个分解系数中两个接近的灰度阈值进行合并取平均值,这样得到3个分解系数,然后在采用3个灰度阈值(例如为20,30,40)分别分割m个分割区域(例如:3个区域图像的灰度值范围分别为:(0,25),(25,35),(35,255))。
[0071]
分解条件为:a
l-2
>a
l-1
与a
l-1
<a
l
,l=1
…
k,即:为对直方图中灰度值进行从小到大排序命名为第1个灰度值到第k个灰度值,a
l-2
为第l-2个灰度值对应的分解系数。
[0072]
具体实施方式三:本实施方式是对具体实施方式二的基于小波变换的动车齿轮箱漏油故障图像识别方法作进一步说明,本实施方式中,步骤22中,
[0073]
j分辨率下的直方图h
fj
(x)用哈尔尺度函数的伸缩与平移表示为:
[0074][0075]
式中,j=log2(d
m
),d
m
为直方图中的最大灰度值,n为分解系数的个数,h
f
(k)=|{(x,y):f(x,y)=k}|;k∈[0,d
m
],h
f
(k)表示f(x,y)中灰度值为k的像素的个数,|
···
|为计数操作,x为图像中每个像素的横坐标,y为图像中每个像素的纵坐标,f(x,y)为输入图像。
[0076]
具体实施方式四:本实施方式是对具体实施方式二的基于小波变换的动车齿轮箱漏油故障图像识别方法作进一步说明,本实施方式中,分解系数{a
k
}的求取方法为:
[0077][0078]
式中,h
f
(x)为h
fj
(x)的多层表达曲线,{a
k
}={<h
f
,φ
j,k
>},{a
k
}为分解系数。
[0079]
本实施方式中,公式1是离散的函数,而公式2是用连续的函数。
[0080]
具体实施方式五:本实施方式是对具体实施方式二的基于小波变换的动车齿轮箱漏油故障图像识别方法作进一步说明,本实施方式中,步骤3中,采用小波域阈值分割算法从齿轮箱轮廓图像中分割出的漏油区域图像具体过程为:
[0081]
步骤31、根据齿轮箱轮廓图像构建直方图,根据直方图确定对含有齿轮箱轮廓图像进行分割的个数n,n为正整数;
[0082]
步骤32、对直方图进行j级小波分解,得到经过j级小波分解后的直方图中每个灰度值对应的分解系数,j的初始值等于1,;
[0083]
步骤33、从得到的分解系数中选出满足分解条件的分解系数,每一个分解系数对应的灰度值为一个灰度阈值,判断选出的分解系数的个数是否大于等于m,如果是,则将分解系数的个数作为灰度阈值的个数,转入步骤34,如果否,j=j+1,则执行步骤32;
[0084]
步骤34、若步骤33得到的分解系数的个数等于n,则用n个分解系数对应的灰度阈值分别对n个分割区域进行二值化分割,得到由n个白色图像和n个黑色图像构成的二值化图像,若步骤33得到的分解系数的个数大于n,则对接近的灰度阈值取平均值,以保证获取n个灰度阈值,再用n个灰度阈值分别对n个分割区域进行二值化分割,得到由n个白色图像和n个黑色图像构成的二值化图像,
[0085]
步骤35、由n个白色图像构成漏油区域图像。
[0086]
具体实施方式六:本实施方式的基于小波变换的动车齿轮箱漏油故障图像识别系统,本实施方式中,系统包括图像获取模块、一号分割模块、二号分割模块和判断模块,图像获取模块,用于获取动车底部图像,从动车底部图像中截取含有齿轮箱的图像;
[0087]
一号分割模块,用于采用小波域阈值分割算法从含有齿轮箱的图像中分割出齿轮箱轮廓图像;
[0088]
二号分割模块,用于采用小波域阈值分割算法从齿轮箱轮廓图像中分割出漏油区域图像;
[0089]
判断模块,用于计算漏油区域图像的面积,将漏油区域图像的面积与预设的面积阈值比较,若漏油区域图像的面积大于预设的面积阈值,则确定齿轮箱漏油,否则,则齿轮箱未漏油。
[0090]
具体实施方式七:本实施方式是对具体实施方式六的基于小波变换的动车齿轮箱漏油故障图像识别方法作进一步说明,本实施方式中,一号分割模块包括区域分割单元、一号小波分解单元、一号灰度阈值获取单元、一号二值化处理单元和齿轮箱轮廓图像获取单元,
[0091]
区域分割单元,用于根据含有齿轮箱的图像构建直方图,根据直方图确定对含有
齿轮箱的图像进行分割的个数m,m为正整数;
[0092]
一号小波分解单元,用于对直方图进行j级小波分解,得到经过j级小波分解后的直方图中每个灰度值对应的分解系数,j的初始值等于1;
[0093]
一号灰度阈值获取单元,用于从得到的分解系数中选出满足分解条件的分解系数,每一个分解系数对应的灰度值为一个灰度阈值,判断选出的分解系数的个数是否大于等于m,如果是,则将分解系数的个数作为灰度阈值的个数,传送给一号二值化处理单元,如果否,j=j+1,则输送给一号小波分解单元;
[0094]
一号二值化处理单元,用于在分解系数的个数等于m时,则用m个分解系数对应的灰度阈值分别对m个分割区域进行二值化分割,得到由m个白色图像和m个黑色图像构成的二值化图像,若分解系数的个数大于m,则对接近的灰度阈值取平均值,以保证获取m个灰度阈值,再用m个灰度阈值分别对m个分割区域进行二值化分割,得到由m个白色图像和m个黑色图像构成的二值化图像;
[0095]
齿轮箱轮廓图像获取单元,用于由m个白色图像构成齿轮箱轮廓图像。
[0096]
具体实施方式八:本实施方式是对具体实施方式七的基于小波变换的动车齿轮箱漏油故障图像识别方法作进一步说明,本实施方式中,构建直方图的过程为:
[0097]
j分辨率下的直方图h
fj
(x)用哈尔尺度函数的伸缩与平移表示为:
[0098][0099]
式中,j=log2(d
m
),d
m
为直方图中的最大灰度值,n为分解系数的个数,h
f
(k)=|{(x,y):f(x,y)=k}|;k∈[0,d
m
],h
f
(k)表示f(x,y)中灰度值为k的像素的个数,|
···
|为计数操作,x为图像中每个像素的横坐标,y为图像中每个像素的纵坐标,f(x,y)为输入图像。
[0100]
具体实施方式九:本实施方式是对具体实施方式七的基于小波变换的动车齿轮箱漏油故障图像识别方法作进一步说明,本实施方式中,分解系数{a
k
}的求取方法为:
[0101][0102]
式中,h
f
(x)为h
fj
(x)的多层表达曲线,{a
k
}={<h
f
,φ
j,k
>},{a
k
}为分解系数。
[0103]
具体实施方式十:本实施方式是对具体实施方式六的基于小波变换的动车齿轮箱漏油故障图像识别方法作进一步说明,本实施方式中,二号分割模块包括子图像分割单元、二号小波分解单元、二号灰度阈值获取单元、二号二值化处理单元和漏油区域图像获取单元,
[0104]
子图像分割单元,用于根据齿轮箱轮廓图像构建直方图,根据直方图确定对含有齿轮箱轮廓图像进行分割的个数n,n为正整数;
[0105]
二号小波分解单元,用于对直方图进行j级小波分解,得到经过j级小波分解后的直方图中每个灰度值对应的分解系数,j的初始值等于1;
[0106]
二号灰度阈值获取单元,用于从得到的分解系数中选出满足分解条件的分解系
数,每一个分解系数对应的灰度值为一个灰度阈值,判断选出的分解系数的个数是否大于等于n,如果是,则将分解系数的个数作为灰度阈值的个数,传送给二值化处理单元,如果否,j=j+1,则输送给一号小波分解单元;
[0107]
二号二值化处理单元,用于在分解系数的个数等于n时,则用n个分解系数对应的灰度阈值分别对n个分割区域进行二值化分割,得到由n个白色图像和n个黑色图像构成的二值化图像,若分解系数的个数大于n,则对接近的灰度阈值取平均值,以保证获取n个灰度阈值,再用n个灰度阈值分别对n个分割区域进行二值化分割,得到由n个白色图像和n个黑色图像构成的二值化图像;
[0108]
漏油区域图像获取单元,用于由n个白色图像构成漏油区域图像。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1