一种外卖送餐机器人的制作方法
[0001]
本发明属于机器人技术领域,涉及一种智能机器人,具体是一种外卖送餐机器人。
背景技术:
[0002]
随着机器人的发展,机器人已经开始服务于我们的生活,在家庭中、销售业与餐饮业等都能出现他们的身影,改变着人们的工作、交流、学习以及娱乐。目前,餐饮业中的点餐和送餐机器人已日渐普及,但人民不再满足现状,希望能够利用机器人代替外卖员进行外卖送餐,打包形式是最早出现的外卖形式,虽然古老,却延续至今。随着电话、手机、网络的普及,外卖行业得到迅速的发展。
[0003]
在现有的外卖送餐中,一般是通过人力完成,外卖配送人员取餐后,对配送地址进行挨个手机导航后再配送。一个外卖人员一次性配送外卖的数量不少,对配送地址需要挨个导航,没有实施最优路径的规划,容易出现送餐延误。每份外卖都有一个纸质的单据,一旦单据掉落或混乱时较容易造成配餐出错。外卖配送人员的交通工具一般为电动车,并且在用户和餐厅的外卖交易之间外卖配送人员属于第三方,当出现紧急情况时外卖配送人员只能自行解决,此外,在配送过程中很难保证食品的安全。
技术实现要素:
[0004]
本发明的目的在于提供一种外卖送餐机器人,实现了外卖的机械化智能配送,减少了外卖配送人员的支出,节约了成本,具有良好的经济效益和发展前景。
[0005]
本发明的目的可以通过以下技术方案实现:一种外卖送餐机器人,包括订单获取模块、路径规划模块、自动巡航模块、中央处理模块、取餐码管理模块、短信发送模块以及存取控制模块;所述订单获取模块,用于接入现有的外卖软件系统,获取需要配送的外卖订单信息,并输出到中央处理模块;所述路径规划模块,根据中央处理模块输出的目的地指令,自动规划前往目的地的路线信息,并输出到自动巡航模块;所述自动巡航模块,根据路径规划模块输出的路线信息,控制机器人自动巡航前往目的地,完成取餐和送餐工作;所述输入采集模块,用于采集商家输入的订单号码或客户输入的取餐号码,并输出到中央处理模块;所述中央处理模块,根据订单管理模块输出的订单信息,将商家地址作为目的地指令发送到路径规划模块,控制机器人前往商家取餐,当收到商家输入的订单号码或客户输入的取餐号码时,与内部的订单号码和取餐号码进行匹配,若匹配成功,输出控制信号到存取控制模块控制存放柜打开,商家放入外卖后,输出控制信号到取餐码管理模块;所述取餐码管理模块,根据中央处理模块输出的控制信号,自动生成取餐号码,并输出到短信发送模块;
所述短信发送模块,将取餐码管理模块生成的取餐号码通过短信的方式,发送到客户手机上;所述存取控制模块,根据中央处理模块输出的控制信号,控制存放柜打开,供商家放入外卖和用户取出外卖。
[0006]
进一步地,所述外卖订单信息包括订单号码、商家地址、电话以及客户地址、电话。
[0007]
本发明的有益效果:本发明提供的外卖送餐机器人,接入现有的外卖软件系统,获取需要配送的外卖订单信息,包括订单号码、商家地址、电话以及客户地址、电话,机器人根据商家地址自动规划取餐路线,启动自动巡航前往商家取餐,商家输入订单号码打开存放柜存入外卖,机器人生成取餐号码短信发送给客户,并根据客户地址自动规划送餐路线,启动自动巡航前往客户地址送餐,客户输入取餐号码打开存放柜取出外卖即可,实现了外卖的机械化智能配送,减少了外卖配送人员的支出,节约了成本,具有良好的经济效益和发展前景。
附图说明
[0008]
下面结合附图和具体实施例对本发明作进一步详细描述。
[0009]
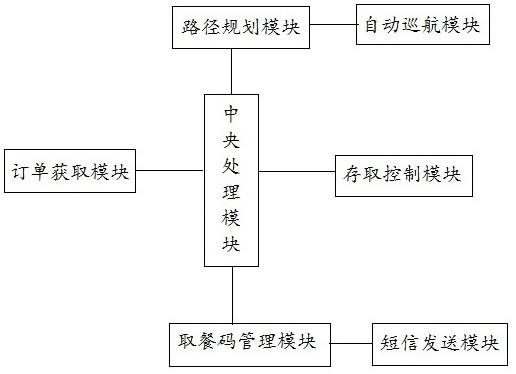
图1是本发明的系统示意图。
具体实施方式
[0010]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
[0011]
在本发明的描述中,需要理解的是,术语“开孔”、“上”、“下”、“厚度”、“顶”、“中”、“长度”、“内”、“四周”等指示方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的组件或元件必须具有特定的方位,以特定的方位构造和操作,因此不能理解为对本发明的限制。
[0012]
如图1所示,本发明提供了一种外卖送餐机器人,包括订单获取模块、路径规划模块、自动巡航模块、中央处理模块、取餐码管理模块、短信发送模块以及存取控制模块。
[0013]
订单获取模块,用于接入现有的外卖软件系统,如美团和饿了么,获取需要配送的外卖订单信息,包括订单号码、商家地址、电话以及客户地址、电话,并输出到中央处理模块。
[0014]
路径规划模块,根据中央处理模块输出的目的地指令,自动规划前往目的地的路线信息,并输出到自动巡航模块。
[0015]
自动巡航模块,根据路径规划模块输出的路线信息,控制机器人自动巡航前往目的地,完成取餐和送餐工作。
[0016]
输入采集模块,用于采集商家输入的订单号码或客户输入的取餐号码,并输出到中央处理模块。
[0017]
中央处理模块,根据订单管理模块输出的订单信息,将商家地址作为目的地指令发送到路径规划模块,控制机器人前往商家取餐,当收到商家输入的订单号码或客户输入
的取餐号码时,与内部的订单号码和取餐号码进行匹配,若匹配成功,输出控制信号到存取控制模块控制存放柜打开,商家放入外卖后,输出控制信号到取餐码管理模块。
[0018]
取餐码管理模块,根据中央处理模块输出的控制信号,自动生成取餐号码,并输出到短信发送模块。
[0019]
短信发送模块,将取餐码管理模块生成的取餐号码通过短信的方式,发送到客户手机上。
[0020]
存取控制模块,根据中央处理模块输出的控制信号,控制存放柜打开,供商家放入外卖和用户取出外卖。
[0021]
本发明提供的外卖送餐机器人,接入现有的外卖软件系统,获取需要配送的外卖订单信息,包括订单号码、商家地址、电话以及客户地址、电话,机器人根据商家地址自动规划取餐路线,启动自动巡航前往商家取餐,商家输入订单号码打开存放柜存入外卖,机器人生成取餐号码短信发送给客户,并根据客户地址自动规划送餐路线,启动自动巡航前往客户地址送餐,客户输入取餐号码打开存放柜取出外卖即可,实现了外卖的机械化智能配送,减少了外卖配送人员的支出,节约了成本,具有良好的经济效益和发展前景。
[0022]
在本说明书的描述中,参考术语“一个实施例”、“示例”、“具体示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
[0023]
以上内容仅仅是对本发明结构所作的举例和说明,所属本技术领域的技术人员对所描述的具体实施例做各种各样的修改或补充或采用类似的方式替代,只要不偏离发明的结构或者超越本权利要求书所定义的范围,均应属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1