一种构建沥青混合料三维空隙模型的方法与流程
[0001]
本发明涉及交通运输工程领域,具体涉及沥青混合料空隙三维模型的特征化设计方法。
背景技术:
[0002]
沥青混合料中空隙的存在为水气/腐蚀介质等的传输和扩散提供了通道,同时空隙的不均匀分布对材料受力传递方式具有显著影响,因此在沥青混合料传质特性、细观力学特性的研究中,对于空隙空间分布和细观形态特征的表征非常关键。随着有限单元法和离散单元法等数值求解方法在土木工程材料力学仿真研究中的推广应用,基于数字化空隙模型的沥青混合料渗流/扩散/力学数值模拟被广泛关注,而空隙模型的构建是开展此类研究的基础。由于缺乏对于细观空隙特征的评价方法,以及出于方便建模等方面的考虑,目前仿真几何模型的构建均采用简化的空隙模型,主要包括堆积球阵模型、毛细管模型、管道模型等。
[0003]
然而简化的空隙模型忽略了真实空隙复杂的形态特征和空间分布,导致仿真计算结果难以与真实沥青路面的性能响应相匹配,使得求解结果具有明显的局限性。因此构建基于真实空隙形态特征的沥青混合料空隙模型,是提高沥青混合料数值研究结果可靠性的关键。随着工业ct等无损检测技术在土木工程材料领域的推广应用,沥青混合料细观空隙模型的探测成为可能,由此为真实空隙模型的数字化建模提供了新方法。
[0004]
然而一方面由于沥青混合料空隙随机性大,变异程度高,特征难以描述;另一方面由于缺乏对于空隙复杂形态的量化评价方法,造成沥青混合料空隙的数值化建模难以反映真实空隙形态,这使得沥青混合料的数值化研究结果无法准确表征真实沥青路面的工作状态。因此,有必要建立一种基于真实空隙形态特征的沥青混合料空隙模型构建方法,实现具有形态特征表征能力的空隙模型的设计和输出。
[0005]
而该空隙模型很大程度上受限于沥青混合料试件,空隙的多样性难以充分描述;此外,空隙模型较为随机且不规则,多个随机空隙模型之间缺乏对应的空隙形态特征,不具备对比性。这使得沥青混合料的数值化研究结果无法准确表征真实沥青路面的工作状态。因此,有必要建立一种基于真实空隙形态特征的沥青混合料空隙模型构建方法,实现具有形态特征表征能力的空隙模型的设计和输出。
技术实现要素:
[0006]
本发明的目的是针对目前沥青混合料空隙的数值模型无法准确反映真实空隙形态特征的问题,提出一种构建沥青混合料三维空隙模型的方法。
[0007]
本发明的一种构建沥青混合料三维空隙模型的方法,它是按照以下步骤进行的:
[0008]
步骤一:空隙骨架节点确定
[0009]
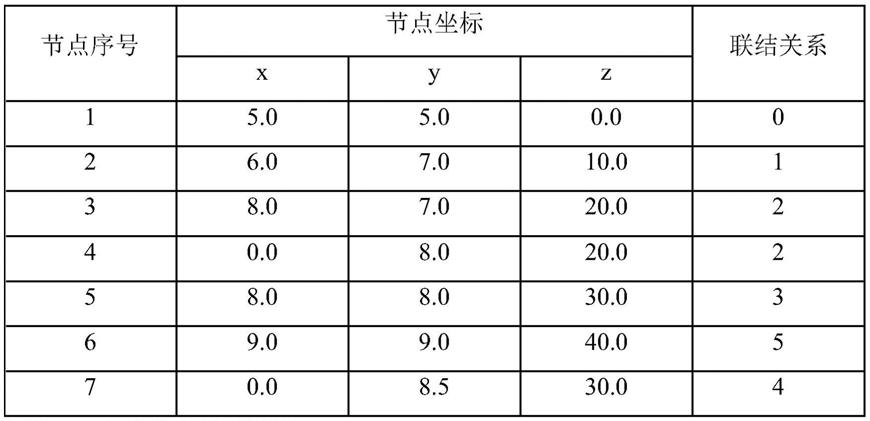
依据目标空隙设计要求,在目标空隙中选取任意点作为初始空隙节点,建立初始空隙节点的空间坐标x、y、z;以初始节点为基点,选取其余空隙节点,并建立每个空隙节点
的空间坐标x、y、z;所述的其余空隙节点的z坐标间距相同;确定初始空隙节点与其余空隙节点的联结关系,记录与该节点相连的空隙节点序号;
[0010]
步骤二:空隙节点断面设计
[0011]
1)在空隙节点位置确定该空隙高度处的空隙断面轮廓控制点;
[0012]
2)在平面坐标系中,确定空隙断面轮廓的控制点坐标x、y;将控制点坐标x、y依次输入到matlab平台csape函数中,计算得到三次样条曲线的计算参数,将三次样条曲线计算参数和空隙轮廓点个数输入到matlab平台ppval函数中,计算空隙断面轮廓的坐标序列;
[0013]
3)将计算得到的空隙断面轮廓坐标序列赋值给空隙节点;
[0014]
4)重复以上步骤,直到所有空隙节点的断面轮廓得到定义;
[0015]
步骤三:利用线性相似渐变算法计算空隙骨架模型
[0016]
将同一z值高度处的空隙节点和断面视为同一层,提取相邻层空隙断面轮廓点的x、y坐标,如果相邻两层空隙节点个数均只有一个,执行两空隙线性相似渐变算法;如果相邻两层空隙节点存在某一层为两个或两个以上,执行三空隙线性相似渐变算法;
[0017]
所述的两空隙线性相似渐变算法具体步骤如下:
[0018]
相邻两层空隙分别记为空隙a和空隙b
[0019]
5)计算相邻两层空隙a和空隙b的形心,以轮廓x、y坐标的均值作为空隙轮廓的形心,通过平移操作将两空隙的形心重合;
[0020]
6)在形心位置处沿x方向和y方向绘制直线,将空隙轮廓分为四个象限;
[0021]
7)在每个象限中分别提取空隙轮廓段所对应的控制点坐标,按照均分周长的方式将该象限内的空隙轮廓等间距分为20份,采用线性插值方式计算20份轮廓小段的分割点坐标,重复该操作,对两个空隙轮廓各四个象限的轮廓段进行分割,并记录分割点坐标;
[0022]
8)对在同一象限内的两层空隙轮廓段的分割点进行一一对应,连接对应点,按照相邻两层空隙之间的内插断面个数对对应点连线进行等分,重复该步骤对四个象限内的对应点连线均进行等分操作;
[0023]
9)将四个象限内的等分点进行对应连线,构成闭合的空隙轮廓曲线,由此计算得到相邻两层空隙之间的相似轮廓曲线;
[0024]
10)经过逆向平移操作,将空隙轮廓平移到原始位置,计算得到的空隙轮廓按线性插值方式计算平移距离进行平移操作,使轮廓呈现线性渐变形式;
[0025]
所述的三空隙线性相似渐变算法具体步骤如下,其中某层的单个空隙记为空隙a,另外一层的两个空隙分别记为空隙b和空隙c;
[0026]
11)分别计算空隙a、空隙b以及空隙c的形心坐标,连接空隙b和空隙c的形心,经过旋转操作使形心连线处于水平方向,此处三个空隙轮廓旋转相同角度;
[0027]
12)计算空隙b和空隙c的面积,并按下式计算分界点p位置:
[0028][0029]
式中l
bp
——o
b
到点p的距离;
[0030]
l
bc
——o
b
到o
c
的距离;
[0031]
s
b
——空隙b轮廓的断面面积;
[0032]
s
c
——空隙c轮廓的断面面积;
[0033]
在p点处做竖直方向直线,将空隙a分为两部分,记为空隙a1和空隙a2;
[0034]
13)以空隙b对应空隙a1,空隙c对应空隙a2,分别进行两空隙线性相似渐变算法,计算中间层空隙轮廓;
[0035]
14)空隙a向空隙b、空隙c相似渐变的中间高度处视为中间层空隙轮廓的汇合位置,将空隙a分割位置处相邻象限内的中间层空隙轮廓进行融合操作,融合操作具体为选取空隙b区域内计算空隙轮廓20个分割点中前10个点,与空隙c区域内计算空隙轮廓20个分割点中后10个点进行拼接,构成融合后的空隙轮廓坐标,由此计算得到三空隙线性相似渐变算法的中间层空隙轮廓;
[0036]
步骤四:导出设计空隙断层扫描图像
[0037]
提取出任一层的空隙轮廓坐标,转化为二值化图像,即空隙轮廓内的矩阵点记为0,空隙轮廓外的矩阵点记为1,将矩阵以二值化图像形式输出;
[0038]
步骤五:利用ct三维重构软件输出空隙几何模型
[0039]
将空隙二值化图像导入ct三维重构软件中,进行空隙模型的重构,至此完成了沥青混合料空隙模型的设计。
[0040]
步骤二中所述的空隙轮廓点与控制点不同,控制点只是手动确定的数量较少的点,轮廓点为在此基础上采用三次样条曲线计算出的轮廓加密点。
[0041]
进一步地,步骤一中所述的空隙节点数量为5~20个。
[0042]
进一步地,步骤一中所述的初始空隙节点空间坐标z为0。
[0043]
进一步地,步骤一中所述的空隙节点的空间坐标z允许重复。
[0044]
进一步地,步骤二中所述的轮廓控制点数量为8~16个。
[0045]
进一步地,步骤二中所述的轮廓坐标序列数量为100个。
[0046]
进一步地,步骤二中所述的空隙断面轮廓的控制点为在步骤一确定的空隙节点高度处,确定的二维坐标点,用于控制断面形态。
[0047]
本发明相比与现有技术具有如下优势:
[0048]
(1)提出了基于骨架-断面分维设计的空隙数值模型构建方法
[0049]
本发明将空隙数值模型构建分为空隙的骨架方向和断面方向两个维度,进而实现了模型构建方法的简化,其具体流程为:首先依据空隙的空间位置走向,确定空隙骨架节点(即空隙节点)的相对空间位置坐标,然后依据空隙形态特征,设计骨架节点(即空隙节点)处的空隙断面轮廓,最后通过相应算法,实现三维空间内空隙模型的计算。通过该方法,降低了真实空隙特征的表征难度,实现了三维空间下复杂空隙模型的构建。
[0050]
(2)采用三次样条曲线拟合控制点的方式设计空隙断面
[0051]
沥青混合料的空隙断面形态复杂,不规则程度较大,断面设计难度较大。本发明首先利用控制点确定出空隙断面的大致形状,然后以控制点坐标为边界条件,利用matlab函数csape和ppval获得通过控制点的三次样条曲线轮廓坐标,进而设计出空隙的断面形状。该方法将不规则的断面形状通过控制点加以约束,可以快速设计出空隙轮廓,同时通过调整控制点坐标,可以便捷地对空隙轮廓进行修改。
[0052]
(3)提出了基于真实空隙特性的空隙模型设计方法
[0053]
本发明提出的空隙三维模型构建方法最基本的设计参数是空隙骨架节点(即空隙节点)空间位置和空隙断面轮廓,这两方面的参数可以通过ct扫描的方式获得,因此,可以
据此建立基于真实空隙形态特征的空隙数值模型,具体实施方式为:通过ct断层扫描技术获得沥青混合料空隙的断层图像,提取空隙骨架和特征节点(即空隙节点)的断面轮廓,在空隙模型设计过程中,将空隙骨架节点(即空隙节点)特征和断面轮廓赋予设计模型,由此建立可反映真实空隙特征的空隙数值模型,且空隙特征可按研究需求进行调整。该方法为真实空隙特征下的数值仿真研究提供了技术手段。
[0054]
(4)提出了两/三空隙之间的线性相似渐变算法
[0055]
本发明提出了两/三空隙之间的线性相似渐变算法,利用相邻空隙轮廓控制点对应、等间距划分的方法,实现了相邻层关键空隙断面之间的线性过渡。具体实施原理是将相邻层的空隙断面进行控制点的等量标记,由此实现相邻层空隙轮廓控制点的一一对应;采用等间距划分的方法,对控制点的连线进行等分;最后连接等分点,由此构成中间过渡断面。利用该算法,可以仅仅设计关键骨架节点位置的空隙轮廓,而得到每一层空隙的断面控制轮廓,降低设计工作量。
[0056]
本发明的有益效果为:
[0057]
1)可设计复杂形态特征,或接近真实的空隙模型
[0058]
本发明采用分维设计思路,从空隙的骨架和断面两个维度分别对空隙进行设计,理论上可以实现任意特征空隙的设计建模;通过提取真实沥青混合料的空隙断面并赋予骨架节点,可实现接近真实空隙特征的模型构建;利用该方法建立的空隙模型模拟沥青混合料的渗流/扩散/力学行为,可有效反映真实沥青路面的性能响应。
[0059]
2)可按照目标空隙特性设计空隙模型
[0060]
目前对于空隙的建模多采用简化的空隙模型,或者利用ct图像进行三维重构。前者过于理想化,忽略了空隙的不规则的形态;后者基于真实空隙进行建模,空隙特征受限于ct扫描试件,且难以对空隙特征进行修改。
[0061]
由于本发明空隙模型的设计基本要素为骨架节点位置和空隙断面,通过控制这两个要素的形态指标,可实现不同特征空隙模型的设计,同时将空隙的不规则形态考虑在内。本发明为沥青混合料空隙特性的参数分析提供了途径,可实现同一空隙模型在不同空隙特征下的性能研究。
附图说明
[0062]
图1为空隙骨架节点及空隙骨架图;
[0063]
图2为空隙断面控制点及生成的轮廓图;
[0064]
图3为空隙断面的定义图;
[0065]
图4为两空隙之间的线性相似渐变算法图;
[0066]
图5为三空隙之间的线性相似渐变算法图;
[0067]
图6为空隙骨架模型图;
[0068]
图7为空隙轮廓和二值化图像图;
[0069]
图8为空隙三维模型图。
具体实施方式
[0070]
本领域的普通技术人员可以理解,上述各实施方式是实现本发明的具体实施例,
而在实际应用中,可以在形式上和细节上对其作各种改变,而不偏离本发明的精神和范围。
[0071]
为使本发明实施例的目的、技术方案和优点更加清楚明白,下面将详细叙述清楚说明本发明所揭示内容的精神,任何所属技术领域技术人员在了解本发明内容的实施例后,当可由本发明内容所教示的技术,加以改变及修饰,其并不脱离本发明内容的精神与范围。
[0072]
本发明的示意性实施例及其说明用于解释本发明,但并不作为对本发明的限定。
[0073]
以下结合附图和空隙设计实例对本发明的具体实施方式进行详细说明:
[0074]
步骤一:空隙骨架节点确定
[0075]
依据目标空隙设计要求,在目标空隙中选取任意点作为初始空隙节点(空隙骨架节点),建立初始空隙节点(空隙骨架节点)的空间坐标x、y、z;以初始节点为基点,选取其余空隙节点,并建立每个空隙节点(空隙骨架节点)的空间坐标x、y、z;所述的其余空隙节点的z坐标间距相同;确定初始空隙节点(空隙骨架节点)与其余空隙节点(空隙骨架节点)的联结关系,记录与该节点相连的空隙节点(空隙骨架节点)序号;
[0076]
空隙节点(空隙骨架节点)的主要设计参数见表1所示,空隙节点(空隙骨架节点)见附图1所示。
[0077]
表1空隙骨架节点的设计参数
[0078][0079]
步骤二:空隙节点断面设计
[0080]
1)在空隙节点(空隙骨架节点)位置确定该空隙高度处的空隙断面轮廓控制点;根据断面的复杂程度,轮廓控制点通常在8-16个为宜,见附图2控制点所示,控制点坐标见表2所示;
[0081]
2)在平面坐标系中,确定空隙断面轮廓的控制点坐标x、y;将控制点坐标x、y依次输入到matlab平台csape函数中,计算得到三次样条曲线的计算参数,将三次样条曲线计算参数和空隙轮廓点个数输入到matlab平台ppval函数中,计算空隙断面轮廓的坐标序列;见附图2断面所示;轮廓坐标个数可以按需取定,为保证空隙断面精度,同时考虑空隙模型计算成本,以40-100个轮廓点为宜,轮廓点的序列见表3所示;
[0082]
3)将计算得到的空隙断面轮廓坐标序列赋值给空隙节点;
[0083]
4)重复以上步骤,直到所有空隙节点的断面轮廓得到定义;各节点处空隙断面的
定义见附图3所示;
[0084]
表2空隙断面控制点设计坐标
[0085]
序号x坐标y坐标序号x坐标y坐标12268523371033358814589625771041
[0086]
表3空隙断面轮廓计算坐标
[0087][0088][0089]
步骤三:利用线性相似渐变算法计算空隙骨架模型
[0090]
将同一z值高度处的空隙节点和断面视为同一层,提取相邻层空隙断面轮廓点的x、y坐标,如果相邻两层空隙轮廓点个数均只有一个,执行两空隙线性相似渐变算法;如果相邻两层空隙轮廓点存在某一层为两个或两个以上,执行三空隙线性相似渐变算法;
[0091]
两空隙线性相似渐变算法具体步骤如下,相邻两层空隙分别记为空隙a和空隙b,
见附图4所示。
[0092]
1)计算相邻两层空隙a和空隙b的形心,以轮廓x、y坐标的均值作为空隙轮廓的形心,通过平移操作将两空隙的形心重合;
[0093]
2)在形心位置处沿x方向和y方向绘制直线,将空隙轮廓分为四个象限;
[0094]
3)在每个象限中分别提取空隙轮廓段所对应的控制点坐标,按照均分周长的方式将该象限内的空隙轮廓等间距分为20份,采用线性插值方式计算20份轮廓小段的分割点坐标。重复该操作,对两个空隙轮廓各四个象限的轮廓段进行分割,并记录分割点坐标。
[0095]
4)对在同一象限内的两层空隙轮廓段的分割点进行一一对应,连接对应点,按照相邻两层空隙之间的内插断面个数对对应点连线进行等分。重复该步骤对四个象限内的对应点连线均进行等分操作;
[0096]
5)将四个象限内的等分点进行对应连线,构成闭合的空隙轮廓曲线,由此计算得到相邻两层空隙之间的相似轮廓曲线。
[0097]
6)经过逆向平移操作,将空隙轮廓平移到原始位置,计算得到的空隙轮廓按线性插值方式计算平移距离进行平移操作,使轮廓呈现线性渐变形式。
[0098]
三空隙线性相似渐变算法具体步骤如下,其中某层的单个空隙记为空隙a,另外一层的两个空隙分别记为空隙b和空隙c,见附图5所示。
[0099]
1)分别计算空隙a、空隙b以及空隙c的形心坐标,连接空隙b和空隙c的形心,经过旋转操作使形心连线处于水平方向,此处三个空隙轮廓旋转相同角度。
[0100]
2)计算空隙b和空隙c的面积,并按下式计算分界点p位置:
[0101][0102]
式中l
bp
——o
b
到点p的距离;
[0103]
l
bc
——o
b
到o
c
的距离;
[0104]
s
b
——空隙b轮廓的断面面积;
[0105]
s
c
——空隙c轮廓的断面面积。
[0106]
在p点处做竖直方向直线,将空隙a分为两部分,记为空隙a1和空隙a2;
[0107]
3)以空隙b对应空隙a1,空隙c对应空隙a2,分别进行两空隙线性相似渐变算法,计算中间层空隙轮廓。
[0108]
4)空隙a向空隙b、空隙c相似渐变的中间高度处视为中间层空隙轮廓的汇合位置,将空隙a分割位置处相邻象限内的中间层空隙轮廓进行融合操作,融合操作具体为选取空隙b区域内计算空隙轮廓20个分割点中前10个点,与空隙c区域内计算空隙轮廓20个分割点中后10个点进行拼接,构成融合后的空隙轮廓坐标。由此计算得到三空隙线性相似渐变算法的中间层空隙轮廓。
[0109]
经过相似渐变算法计算所得的空隙骨架模型见附图6所示。
[0110]
步骤四:导出设计空隙断层扫描图像
[0111]
提取出任一层的空隙轮廓坐标,转化为二值化图像,即空隙轮廓内的矩阵点记为0,空隙轮廓外的矩阵点记为1,将矩阵以二值化图像形式输出,空隙的轮廓和二值化图像见附图7所示。
[0112]
步骤五:利用ct三维重构软件输出空隙几何模型
[0113]
将空隙二值化图像导入ct三维重构软件中,进行空隙模型的重构,并输出可用于数值仿真计算的三维模型,见附图8所示。至此完成了沥青混合料空隙模型的设计。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1