一种基于神经网络的实时数据预警分析方法与流程
[0001]
本发明涉及数据分析技术领域,特别是一种基于神经网络的实时数据预警分析方法。
背景技术:
[0002]
目前,针对工程机械的工作状态监测,大多是依靠操作人员进行现场的判断,判断工程机械是否出现故障。
[0003]
现有技术中,也出现了通过在工程机械中设置状态监测设备来对工程机械的工作状态进行监测的技术方案,但是上述方案中,通常是设置针对工程机械某项指标(如温度、压力等数据)进行监测,当该指标超过设定的指标时发出报警提醒。但是上述方式无法做到对工程机械的工作状态进行提前预测,智能水平有待提高。
技术实现要素:
[0004]
针对上述问题,本发明旨在提供一种基于神经网络的实时数据预警分析方法。
[0005]
本发明的目的采用以下技术方案来实现:
[0006]
本发明示出一种基于神经网络的实时数据预警分析方法,其特征在于,包括:
[0007]
实时采集工程机械关键部件的部件振动信号;
[0008]
根据实时采集的部件振动信号进行分帧处理,并根据当前帧部件振动信号进行特征提取,获取当前帧部件振动信号的特征参数;
[0009]
根据当前帧部件振动信号的特征参数组成输入向量输入到训练好的基于神经网络的状态预测模型中,并获取该状态预测模型输出的状态预测结果;
[0010]
当状态预测结果为异常时,发出异常报警信息。
[0011]
可选的,该方法还包括,将振动传感器设置在工程机械的关键部件中,通过振动传感器实时采集工程机械关键部件的部件振动信号。
[0012]
可选的,根据实时采集的部件振动信号进行分帧处理,包括:
[0013]
采用设定的窗口以及设定的步长对实时采集的部件振动信号进行分帧处理,获取各帧部件振动信号,其中记最新获取的部件振动信号帧为当前帧部件振动信号z(t),其中t表示当前时刻对应的帧数。
[0014]
可选的,在对当前帧部件振动信号z(t)进行特征提取之前,还包括,对当前帧部件振动信号z(t)进行预处理。
[0015]
可选的,对当前帧部件振动信号z(t)进行预处理,包括:
[0016]
对接收到的当前帧部件振动信号z(t)进行快速傅里叶变换,获取当前帧部件振动信号的频域幅度谱|g(t,k)|,其中t表示该频域幅度谱对应部件振动信号的帧数,k表示频域幅度谱中第k个频点;
[0017]
针对获取频域幅度谱|g(t,k)|进行增强处理,其中采用的增强处理函数为:
[0018][0019][0020]
式中,|y(t,k)|表示对应第t帧部件振动信号的增强处理后的频域幅度谱,|g(t,k)|表示对应第t帧部件振动信号的频域幅度谱,|s(t,k)|表示对应第t帧部件振动信号的调节幅度谱,|s(t-2,k)|表示对应第t-1部件振动信号的调节幅度谱,其中针对前2帧部件振动信号,设定β表示设定的调节因子,其中β≥1,α表示设定的影响因子,δ表示设定的偏差因子,其中δ∈[0.5,0.99],f(k)表示设定的基准偏差幅度谱,其中ω1和ω2分别表示设定的权重因子,其中ω1+ω2=1;
[0021]
根据获取的增强处理后的频域幅度谱进行逆快速傅里叶变换,获取预处理后的部件振动信号z
′
(t)。
[0022]
本发明的有益效果为:本发明提出一种根据采集的部件振动信号,采用基于神经网络的状态预测模型对部件振动信号进行预警分析处理,能够根据工程机械当前的运行状态准确预测工程机械是否存在异常情况,能够发出提前预警消息,提高了针对工程机械工作状态检测的智能化水平。
附图说明
[0023]
利用附图对本发明作进一步说明,但附图中的实施例不构成对本发明的任何限制,对于本领域的普通技术人员,在不付出创造性劳动的前提下,还可以根据以下附图获得其它的附图。
[0024]
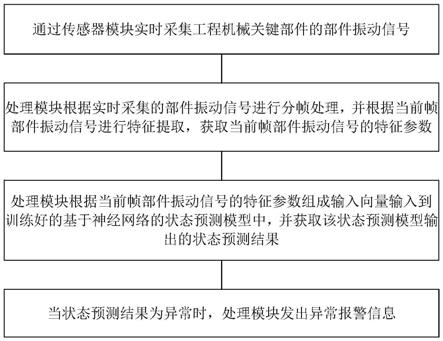
图1为本发明实施例所述一种基于神经网络的实时数据预警分析方法的方法流程图。
具体实施方式
[0025]
结合以下应用场景对本发明作进一步描述。
[0026]
参见图1实施例所示一种基于神经网络的实时数据预警分析方法,其特征在于,包括:通过传感器模块实时采集工程机械关键部件的部件振动信号;
[0027]
处理模块根据实时采集的部件振动信号进行分帧处理,并根据当前帧部件振动信号进行特征提取,获取当前帧部件振动信号的特征参数;
[0028]
处理模块根据当前帧部件振动信号的特征参数组成输入向量输入到训练好的基于神经网络的状态预测模型中,并获取该状态预测模型输出的状态预测结果;
[0029]
当状态预测结果为异常时,处理模块发出异常报警信息。
[0030]
上述实施方式中,提出一种根据采集的部件振动信号,采用基于神经网络的状态预测模型对部件振动信号进行预警分析处理,能够对根据工程机械当前的运行状态准确预测工程机械是否存在异常情况,能够发出提前预警消息,提高了针对工程机械工作状态检测的智能化水平。
[0031]
可选的,传感器模块具体为振动传感器。
[0032]
该方法还包括,将振动传感器设置在工程机械的关键部件中,通过振动传感器实时采集工程机械关键部件的部件振动信号。
[0033]
可选的,处理模块根据实时采集的部件振动信号进行分帧处理,包括:
[0034]
采用设定的窗口以及设定的步长对实时采集的部件振动信号进行分帧处理,获取各帧部件振动信号,其中记最新获取的部件振动信号帧为当前帧部件振动信号z(t),其中t表示当前时刻对应的帧数。
[0035]
可选的,处理模块在对当前帧部件振动信号z(t)进行特征提取之间,还包括,对当前帧部件振动信号z(t)(或预处理后的当前帧部件振动信号z
′
(t))进行预处理。
[0036]
可选的,处理模块对当前帧部件振动信号z(t)进行预处理,包括:
[0037]
对接收到的当前帧部件振动信号z(t)进行快速傅里叶变换,获取当前帧部件振动信号的频域幅度谱|g(t,k)|,其中t表示该频域幅度谱对应部件振动信号的帧数,k表示频域幅度谱中第k个频点;
[0038]
针对获取频域幅度谱|g(t,k)|进行增强处理,其中采用的增强处理函数为:
[0039][0040][0041]
式中,|y(t,k)|表示对应第t帧部件振动信号的增强处理后的频域幅度谱,|g(t,k)|表示对应第t帧部件振动信号的频域幅度谱,|s(t,k)|表示对应第t帧部件振动信号的调节幅度谱,|s(t-2,k)|表示对应第t-1部件振动信号的调节幅度谱,其中针对部件振动信号中前2帧部件振动信号,设定β表示设定的调节因子,其中β≥1,α表示设定的影响因子,δ表示设定的偏差因子,其中δ∈[0.5,0.99],f(k)表示设定的基准偏差幅度谱,其中ω1和ω2分别表示设定的权重因子,其中ω1+ω2=1;
[0042]
根据获取的增强处理后的频域幅度谱进行逆快速傅里叶变换,获取预处理后的部件振动信号z
′
(t)。
[0043]
上述实施方式中,提出了一种针对实时采集的部件振动信号进行预处理的技术方案,通过获取当前帧部件振动信号的频率幅度谱作为基础进行增强处理,能够有效地自适应去除部件振动信号中包含的噪声干扰,同时提出了一种针对频率幅度谱进行的改进增强处理函数,该函数中能够自适应根据先前采集的部件振动信号对当前实时最新采集的部件振动信号帧进行增强处理,增强过程基于部件振动信号自身的特性,适应性强,增强效果好。
[0044]
可选的,处理模块根据当前帧部件振动信号进行特征提取,获取当前帧部件振动信号的特征参数,具体包括:
[0045]
对当前帧部件振动信号z(t)进行三层小波包分解处理,获取该当前帧部件振动信号的8个小波包系数其中表示低频小波包系数,表示第n
个高频小波包系数;
[0046]
分别根据获取的8个小波包系数进行重构,获取8个子频信号其中表示第1个子频信号,其根据低频小波宝系数重构所得,至表示第2至8个子频信号,其分别根据第1-7个高频小波包系数重构所得;
[0047]
分别获取各子频信号的能量系数,其中采用的能量系数获取函数为:
[0048][0049]
式中,表示第n个子频信号的能量系数,其中n=1,2,...,8;表示第n个子频系数中第i个采样点的幅值,i表示采样点的总数;
[0050]
根据获取的能量系数构建当前帧部件振动信号的特征参数为:
[0051][0052]
其中表示第t帧部件振动信号的特征参数,
[0053]
上述实施方式中,提出了一种根据部件振动信号进行小波包分解,并根据获取的小波包系数构建反映部件振动信号不同频率范围内信号特性的特征参数,通过采用8维度的特征参数对部件振动信号的特性进行表示,一方面能够提高特征参数对振动信号中异常振动信号的敏感程度,另一方面有助于将根据该特征参数组成基于神经网络的状态预测模型的输入向量,提高模型的状态预测精确度;使得基于神经网络的状态预测模型对状态的预测能够达到最好的性能。
[0054]
可选的,在进行上述根据当前帧部件振动信号进行特征提取时,其也可以根据预处理后的当前帧部件振动信号进行。本领域技术人员应当理解,在基于上述对部件振动信号进行预处理的实施方式下,该方法中后续所示的根据部件振动信号进行的处理方法,其也可以采用预处理后的部件振动信号替代,从而形成多种不同的实施方式,本申请在此不再重复叙述。
[0055]
可选的,将根据当前帧部件振动信号的特征参数组成输入向量输入到训练好的基于神经网络的状态预测模型中,其中采用的输入向量包括为
[0056]
其中in
t
表示针对当前时刻的输入向量,分别表示根据第t-2,t-2,t帧的部件振动信号获取的特征参数。
[0057]
上述实施方式,通过构建24维的输入向量输入到训练好的状态预测模型中能够从当前实时采集部件振动信号自身的特征,结合信号的时域变化趋势特征对当前工程机械的工作状态进行良好表达,从而使得基于神经网络的状态预测模型能过根据输入的24维度输入向量准确对工程机械工作状态进行准确预测,提高了数据预警分析的准确度。
[0058]
其中基于神经网络的状态预测模型的训练方法为,基于预先获取的部件振动信号以及该信号对应的状态数据,从中截取其中3帧部件振动信号对应的特征参数组成样本输入向量,将该3帧振动部件信后之后设定时间周期对应的状态数据作为样本输入向量;
[0059]
将样本输入向量和样本输入向量组成训练样本对基于神经网络的状态预测模型
进行训练,直到模型收敛或超出设定的训练周期后,获取训练好的基于神经网络的状态预测模型,其中该模型能够根据连续3帧部件振动信号对应的他正参数组成的输入向量,预测设定周期后的状态数据,其中状态包括正常或异常。
[0060]
最后应当说明的是,以上实施例仅用以说明本发明的技术方案,而非对本发明保护范围的限制,尽管参照较佳实施例对本发明作了详细地说明,本领域的普通技术人员应当分析,可以对本发明的技术方案进行修改或者等同替换,而不脱离本发明技术方案的实质和范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1