一种传统集装箱码头联合调度方法和辅助调度系统与流程
1.本发明涉及传统集装箱码头资源分配技术领域,尤其涉及一种传统集装箱码头联合调度方法和辅助调度系统。
背景技术:
2.港口业的发展是物流发展的重要基础,物流的发展又是港口业发展重要推动力量;港口作为国际贸易和国际运输的枢纽,承担了90%以上的全球海上货物运输任务。集装箱码头作为港口的重要组成部分,具有不可忽视的地位,其中集装箱码头又以传统集装箱码头为主。
3.当前,对于传统集装箱码头大型机械调度,国内外均采用人工调度的模式,其合理性往往由人的经验决定。全球主流集装箱码头系统供应商(如美国navis、韩国cyberlogitec等公司)也仅是提供了集卡机械等局部的的调度方案,实际应用中存在着功能单一、考虑不周的情况。国内如上海、深圳、宁波等各大港口均自主研发了集装箱码头系统,但在计划控制调度方面与国外的系统对比还有较大差距。
4.在国内,出于方便管理的目的,大部分传统集装箱码头采用的都是作业线装卸船模式,即一组若干个工作人员(包括岸桥组、集卡组、场地组)负责管理一条船下的作业线。现如今,在全球化趋势下,海内外贸易量的不断上升必将带来港口货运事业的蓬勃发展,一个港口内同时有多艘货船作业不再是凤毛麟角,此时再坚持作业线模式将会带来大量的资源浪费。由于不同船的到港离港时间及装卸量存在差异,必将出现某些工作线任务繁重而另一些任务空闲,资源的分配不均匀会导致大量的资源浪费,与此同时带来的是港口服务质量的下降,这与港口提出的“以船主为主,重点提高服务质量”目标无疑是南辕北辙。
5.对于传统集装箱码头大型机械调度存在以下相关专利:
6.面向作业面的集装箱码头装船配载非线性规划方法(专利号cn200910054482.8)以作业面模式对集装箱码头建模给出船舶配载计划,即船舶的装卸量(例:装2000teu,卸1800teu),船舶配载计划主要是根据船公司的需求制订,需在装卸船开始之前完成。
7.集装箱码头全场自动化联合调度方法(cn201610228358.9)提出的联合调度方法主要是基于作业线模式,即单船情况下的一条作业线下的所有设备(岸桥∶场桥∶集卡=1∶2∶5)的联合调度,而没有并没有从根本上解决资源浪费的问题。
8.因此,本领域的技术人员致力于开发一种传统集装箱码头联合调度方法和辅助调度系统。
技术实现要素:
9.有鉴于现有技术的上述缺陷,本发明所要解决的技术问题是设计一种基于作业面的传统集装箱码头联合调度方法和辅助调度系统,以提高设备的利用率,减少对船舶的服务时间,从而提高港口服务质量。
10.发明人将多条作业线合为一个作业面对装卸船设备(岸桥、集卡、场桥)统一管理,
基于作业面,设计了一种传统集装箱码头联合调度方法。本发明的一个实施例中,包括以下步骤:
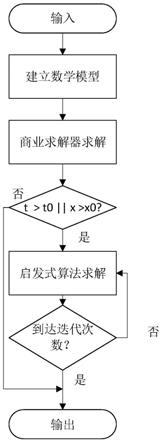
11.s100、建立数学模型,根据生产系统实际情况将调度问题抽象为hfsp(混合流水车间问题),然后进行数学建模;
12.s200、商业求解器求解,当不能满足收敛条件时,执行s300,否则执行s400;
13.s300、启发式算法求解,直到满足迭代次数,执行s400;
14.s400、输出。
15.可选地,在上述实施例中的传统集装箱码头联合调度方法中,步骤s100包括将港口设备及参数抽象为数学模型,用opl语言建立约束规划模型。
16.可选地,在上述任一实施例中的传统集装箱码头联合调度方法中,步骤s100包括:
17.s101、确定相关参数及决策变量,其中
18.相关参数包括:装船集装箱集合l、卸船集装箱集合u、场场集合ycs、岸桥集合qcs、集卡集合yts、可装卸集装箱i的场桥集合yc[i],i∈l∪u、可装卸集装箱i的岸桥集合qc[i],i∈l∪u、集装箱i的需要的场桥操作时间t
yc
[i],i∈l∪u、集装箱i的需要的岸桥操作时间t
qc
[i],i∈l∪u、集装箱i的需要的集卡操作时间t
yt
[i],i∈l∪u、岸桥qc从箱i到箱j间的空载移动时间empty
qc
[i,j],i,j∈l∪u、场桥yc从箱i到箱j间的空载移动时间empty
yc
[i,j],i,j∈l∪u、集卡yt从箱i到箱j间的空载移动时间empty
yt
[i,j],i,j∈l∪u、拥有前后序列关系的集装箱对(i在j前)p(i,j),i,j∈l∪u;
[0019]
决策变量包括:
[0020]
场桥yc m对箱i的操作optoperation.yc[i,m],为间隔型变量,i∈l∪u,m∈ycs、
[0021]
岸桥qc n对箱i的操作optoperation.qc[i,n],为间隔型变量,i∈l∪u,n∈qcs、
[0022]
集卡yt l对箱i的操作optoperation.yt[i,l],为间隔型变量,i∈l∪u,l∈yts、
[0023]
场桥yc对箱i的操作时间operatin.yc[i],为间隔型变量,i∈l∪u、
[0024]
岸桥qc对箱i的操作时间operation.qc[i],为间隔型变量,i∈l∪u、
[0025]
集卡yt对箱i的操作时间operation.yt[i],为间隔型变量,i∈l∪u、
[0026]
场桥yc m的操作序列sequence.yc[m],为序列型变量,m∈ycs、
[0027]
岸桥qc n的操作序列sequence.qc[n],为序列型变量,n∈qcs、
[0028]
集卡yt l的操作序列sequence.yt[l],为序列型变量,l∈yts;
[0029]
s102、确定目标函数,以最小化工作时长跨度c
max
为目标,c
max
取最后一个要装船的箱子的任务结束时间和最后一个要堆放入堆场的箱子的任务结束时间中的最大值,目标函数为:
[0030][0031]
s103、确定约束条件,约束条件包括:
[0032]
替代资源约束,alternative约束指出第一个决策变量(operation.yc[i],operation.qc[i],operation.yt[i])在第二个决策变量(optoperation.yc[i,m],optoperation.qc[i,n],optoperation.yt[i,l])的集合中遍历:
[0033][0034][0035][0036]
不重叠约束,场桥、岸桥和卡车是析取资源,析取资源是指一次只能执行一项任务的资源。nooverlap约束指出该序列(sequence
yc[m]
,sequence
qc[n]
,sequence
yt[l]
)定义了一系列不重叠的间隔。因此,任何任务都必须在每个场桥、岸桥和卡车的处理序列中的下一个任务开始之前结束:
[0037][0038][0039][0040]
操作设备顺序约束,每个集装箱都具有三个关联的操作(qc,yc和yt),对进口箱,需要经过qc卸船、yt运输、yc堆存的过程;对出口箱,需要经过yc提箱、yt运输、qc装船的过程,每个集装箱的操作顺序都不能颠倒,即下一个操作要在当前操作结束之后才能开始,下面四个约束分别指,当i为出口箱,yt的开始时间应在yc的结束时间之后;当i为出口箱,qc的开始时间应在yt的结束时间之后;当i为进口箱,yt的开始时间应在qc的结束时间之后;当i为进口箱,yc的开始时间应在yt的结束时间之后:
[0041][0042][0043][0044][0045]
优先级约束,当集装箱i和j之间存在先后关系时(i箱与j箱在同一个堆中,且j箱在i箱的下面),必须在集装箱j之前对集装箱i进行操作,下面两个约束分别指,当两箱均为出口箱,i的yc操作必须在j的yc操作之前开始;当两箱均为进口箱,i的qc操作必须在j的qc操作之前开始:
[0046]
[0047][0048]
起吊机空载距离约束,对于邻接的任务(i,j),岸桥或场桥在完成前一个任务i后需要保持空载状态去操作任务j,因此任务j的开始时间需要大于等于任务i的结束时间+从i到j的移动时间:
[0049][0050][0051][0052]
集卡空载距离约束,对于邻接的任务(i,j),集卡在运输前一个任务i到目的地后需要行驶一段空载距离去码头区或者堆场区运输下一个任务j,因此任务j的开始时间需要大于等于任务i的结束时间+从i到j的空载行驶时间:
[0053][0054]
堵塞约束,由于场桥或岸桥和卡车之间没有缓冲,因此存在阻塞限制。当现场出现排队阻塞情况,集装箱必须保留在上游资源(场桥、岸桥或卡车)上,以防止该资源操作另一个集装箱;假设对于资源m(qc或yc或yt),在集装箱j之后处理集装箱i,集装箱j必须保留在资源m上,直到其后续资源开始对集装箱j进行操作,m才能开始处理集装箱i;下面四个约束分别指,当yc下无yt,yc需在原地等待下一辆yt取走当前箱子才能进行下一个箱子的操作;当qc下有多个yt排队,后面的yt需要等待前面的yt装卸完才能离开;当qc下无yt,qc需在原地等待下一辆yt取走当前箱子才能进行下一个箱子的操作;当yc下有多个yt排队,后面的yt需要等待前面的yt装卸完才能离开;:
[0055][0056][0057]
[0058][0059]
可选地,在上述任一实施例中的传统集装箱码头联合调度方法中,步骤s200包括:
[0060]
s210、将数学模型输入商业求解器;
[0061]
s220、商业求解器使用分支定界算法求可行解;
[0062]
s230、设定收敛条件,当搜索时间t>t0或振动幅值x>x0,转步骤s300,否则执行s400,其中t0为搜索时间阈值,x0为解的振动幅值阈值。
[0063]
可选地,在上述任一实施例中的传统集装箱码头联合调度方法中,步骤s300包括:
[0064]
s310、对数学模型编码,用矩阵排列编码的方式得到染色体;
[0065]
s320、贪心算法找到一个初始可行解,然后用遗传算法进行全局搜索;
[0066]
s330、确定初始种群数量、迭代次数;
[0067]
s340、确定适应度函数和选择策略,具体地,适应度函数取f=1/f,选择策略选轮盘赌规则,所有种群的适应度之和,p为人口数量,每个染色体被选择的可能性为计算每个染色体的右区间随机生成r∈(0,1],若r∈(c
i
‑1,c
i
],染色体i将被选中进入子代,即下一次迭代的种群个体;
[0068]
s350、确定交叉算子,交叉方式取order crossover(ox),交叉算子的选择不唯一,不同算子的侧重点不同;
[0069]
s360、确定变异算子,变异方式选择在父代(即当前种群的染色体),选择两个切点,交换这两个切点所在列第二行到第五行的值;
[0070]
s370、用matlab中的ga工具箱对数学模型计算,包括对种群进行交叉、变异,根据适应度函数选择一定的后代,一直循环直至到达迭代终止条件。
[0071]
进一步地,在上述实施例中的传统集装箱码头联合调度方法中,交叉算子和变异算子概率设置如下:
[0072][0073]
k为一个正常数,f
avg
为所有适应度的平均值。
[0074]
进一步地,在上述实施例中的传统集装箱码头联合调度方法中,步骤s330中优选初始种群数量为80
‑
160,迭代次数为100
‑
300。
[0075]
进一步地,在上述实施例中的传统集装箱码头联合调度方法中,步骤s330、s340、s350和s360可并行执行。
[0076]
可选地,在上述任一实施例中的传统集装箱码头联合调度方法中,步骤s400输出步骤s200或s300得到的全局解及相应的设备服务序列至现实生产系统中。
[0077]
基于上述传统集装箱码头联合调度方法,本发明的另一个实施例中,提供了一种辅助调度系统,包括:
[0078]
数据存储模块,存储从现实生产系统获取的生产计划;
[0079]
机械高精度定位模块,获取设备的位置信息并存储到数据存储模块,提高数学模型的准确性;
[0080]
数据调用模块,调用数据存储模块中的现实生产系统中的生产计划、相关设备信息和位置信息,为求解数学模型做准备;
[0081]
数学建模模块,根据生产系统实际情况将调度问题抽象为hfsp(混合流水车间问题),然后对此问题进行数学建模;
[0082]
商业求解器模块,使用数据调用模块的数据,对数学建模模块中的数学模型求解;
[0083]
智能调度算法模块,当商业求解器无法求解该数学模型时,同时使用数据调用模块的数据,利用智能调度算法对数学建模模块中的数学模型求解;
[0084]
数据输出模块,将商业求解器模块或智能调度算法模块得到的解与相应的决策变量转化为相应的调度指令,返回到现实生产系统中;
[0085]
数据存储模块存储从现实生产系统中获取生产计划、相关设备信息和通过机械高精度定位模块的设备的位置信息,数据调用模块从数据存储模块中获取数据,为商业求解器模块和智能调度算法模块提供相关数据,商业求解器模块和智能调度算法使用上述传统集装箱码头联合调度方法对数学建模模块中的数学模型求解,数据输出模块向现实生产系统返回调度指令,在不影响现有生产计划的条件下提供辅助策略,根据实际情况调整调度策略。
[0086]
可选地,在上述实施例中的传统集装箱码头辅助调度系统中,上述生产计划信息包括船舶计划表,船舶配载表。
[0087]
可选地,在上述实施例中的传统集装箱码头辅助调度系统中,上述商业求解器模块包括商业求解器ilog cplex。
[0088]
可选地,在上述实施例中的传统集装箱码头辅助调度系统中,上述商业求解器模块采用的求解方法包括运筹学方法,优选穷举法、分支定界法。
[0089]
可选地,在上述实施例中的传统集装箱码头辅助调度系统中,上述智能调度算法包括启发式算法。
[0090]
本发明弥补了目前传统集装箱码头过度依赖人工、功能单一、考虑不周的缺点,在不影响实际生产流程的情况下,为码头的设备高效管理提供了解决办法,提高了设备的利用率,减少了对船舶的服务时间,从而提高了港口服务质量。
[0091]
以下将结合附图对本发明的构思、具体结构及产生的技术效果作进一步说明,以充分地了解本发明的目的、特征和效果。
附图说明
[0092]
图1是图示根据示例性实施例的传统集装箱码头联合调度方法流程图;
[0093]
图2是图示根据示例性实施例的传统集装箱码头辅助调度系统结构图;
[0094]
图3是图示根据示例性实施例的启发式算法流程图。
具体实施方式
[0095]
以下参考说明书附图介绍本发明的多个优选实施例,使其技术内容更加清楚和便
于理解。本发明可以通过许多不同形式的实施例来得以体现,本发明的保护范围并非仅限于文中提到的实施例。
[0096]
在附图中,结构相同的部件以相同数字标号表示,各处结构或功能相似的组件以相似数字标号表示。附图所示的每一组件的尺寸和厚度是任意示出的,本发明并没有限定每个组件的尺寸和厚度。为了使图示更清晰,附图中有些地方示意性地适当夸大了部件的厚度。
[0097]
发明人设计了一种传统集装箱码头联合调度方法,如图1所示,包括如下步骤:
[0098]
s100、建立数学模型,根据生产系统实际情况将调度问题抽象为hfsp(混合流水车间问题),然后进行数学建模,包括将港口设备及参数抽象为数学模型,用opl语言建立约束规划模型,具体包括:
[0099]
s101、确定相关参数及决策变量,其中
[0100]
相关参数包括:装船集装箱集合l、卸船集装箱集合u、场场集合ycs、岸桥集合qcs、集卡集合yts、可装卸集装箱i的场桥集合yc[i],i∈l∪u、可装卸集装箱i的岸桥集合qc[i],i∈l∪u、集装箱i的需要的场桥操作时间t
yc
[i],i∈l∪u、集装箱i的需要的岸桥操作时间t
qc
[i],i∈l∪u、集装箱i的需要的集卡操作时间t
yt
[i],i∈l∪u、岸桥qc从箱i到箱j间的空载移动时间empty
qc
[i,j],i,j∈l∪u、场桥yc从箱i到箱j间的空载移动时间empty
yc
[i,j],i,j∈l∪u、集卡yt从箱i到箱j间的空载移动时间empty
yt
[i,j],i,j∈l∪u、拥有前后序列关系的集装箱对(i在j前)p(i,j),i,j∈l∪u;
[0101]
决策变量包括:
[0102]
场桥yc m对箱i的操作optoperation.yc[i,m],为间隔型变量,i∈l∪u,m∈ycs、
[0103]
岸桥qc n对箱i的操作optoperation.qc[i,n],为间隔型变量,i∈l∪u,n∈qcs、
[0104]
集卡yt l对箱i的操作optoperation.yt[i,l],为间隔型变量,i∈l∪u,l∈yts、
[0105]
场桥yc对箱i的操作时间operatin.yc[i],为间隔型变量,i∈l∪u、
[0106]
岸桥qc对箱i的操作时间operation.qc[i],为间隔型变量,i∈l∪u、
[0107]
集卡yt对箱i的操作时间operation.yt[i],为间隔型变量,i∈l∪u、
[0108]
场桥yc m的操作序列sequence.yc[m],为序列型变量,m∈ycs、
[0109]
岸桥qc n的操作序列sequence.qc[n],为序列型变量,n∈qcs、
[0110]
集卡yt l的操作序列sequence.yt[l],为序列型变量,l∈yts;
[0111]
s102、确定目标函数,以最小化工作时长跨度c
max
为目标,c
max
取最后一个要装船的箱子的任务结束时间和最后一个要堆放入堆场的箱子的任务结束时间中的最大值,目标函数为:
[0112][0113]
s103、确定约束条件,约束条件包括:
[0114]
替代资源约束,alternative约束指出第一个决策变量(operation.yc[i],operation.qc[i],operation.yt[i])在第二个决策变量(optoperation.yc[i,m],optoperation.qc[i,n],optoperation.yt[i,l])的集合中遍历:
[0115]
[0116][0117][0118][0119]
不重叠约束,场桥、岸桥和卡车是析取资源,析取资源是指一次只能执行一项任务的资源。nooverlap约束指出该序列(sequence
yc[m]
,sequence
qc[n]
,sequence
yt[l]
)定义了一系列不重叠的间隔。因此,任何任务都必须在每个场桥、岸桥和卡车的处理序列中的下一个任务开始之前结束:
[0120][0121][0122][0123]
操作设备顺序约束,每个集装箱都具有三个关联的操作(qc,yc和yt),对进口箱,需要经过qc卸船、yt运输、yc堆存的过程;对出口箱,需要经过yc提箱、yt运输、qc装船的过程,每个集装箱的操作顺序都不能颠倒,即下一个操作要在当前操作结束之后才能开始,下面四个约束分别指,当i为出口箱,yt的开始时间应在yc的结束时间之后;当i为出口箱,qc的开始时间应在yt的结束时间之后;当i为进口箱,yt的开始时间应在qc的结束时间之后;当i为进口箱,yc的开始时间应在yt的结束时间之后:
[0124][0125][0126][0127][0128]
优先级约束,当集装箱i和j之间存在先后关系时(i箱与j箱在同一个堆中,且j箱在i箱的下面),必须在集装箱j之前对集装箱i进行操作,下面两个约束分别指,当两箱均为出口箱,i的yc操作必须在j的yc操作之前开始;当两箱均为进口箱,i的qc操作必须在j的qc操作之前开始:
[0129]
[0130][0131]
起吊机空载距离约束,对于邻接的任务(i,j),岸桥或场桥在完成前一个任务i后需要保持空载状态去操作任务j,因此任务j的开始时间需要大于等于任务i的结束时间+从i到j的移动时间:
[0132][0133][0134]
集卡空载距离约束,对于邻接的任务(i,j),集卡在运输前一个任务i到目的地后需要行驶一段空载距离去码头区或者堆场区运输下一个任务j,因此任务j的开始时间需要大于等于任务i的结束时间+从i到j的空载行驶时间:
[0135][0136]
堵塞约束,由于场桥或岸桥和卡车之间没有缓冲,因此存在阻塞限制。当现场出现排队阻塞情况,集装箱必须保留在上游资源(场桥、岸桥或卡车)上,以防止该资源操作另一个集装箱;假设对于资源m(qc或yc或yt),在集装箱j之后处理集装箱i,集装箱j必须保留在资源m上,直到其后续资源开始对集装箱j进行操作,m才能开始处理集装箱i;下面四个约束分别指,当yc下无yt,yc需在原地等待下一辆yt取走当前箱子才能进行下一个箱子的操作;当qc下有多个yt排队,后面的yt需要等待前面的yt装卸完才能离开;当qc下无yt,qc需在原地等待下一辆yt取走当前箱子才能进行下一个箱子的操作;当yc下有多个yt排队,后面的yt需要等待前面的yt装卸完才能离开;:
[0137][0138][0139]
[0140][0141][0142]
s200、商业求解器求解,当不能满足收敛条件时,执行s300,否则执行s400,具体包括:
[0143]
s210、将数学模型输入商业求解器;
[0144]
s220、商业求解器使用分支定界算法求可行解;
[0145]
s230、设定收敛条件,即当搜索时间t>t0或振动幅值x>x0,转步骤s300,否则执行s400,其中t0为搜索时间阈值,x0为解的振动幅值阈值;
[0146]
s300、启发式算法求解,直到满足迭代次数,执行s400,如图3所示,具体包括:
[0147]
s310、对数学模型编码,用矩阵排列编码的方式得到染色体;
[0148]
s320、贪心算法找到一个初始可行解,然后用遗传算法进行全局搜索;
[0149]
s330、确定初始种群数量、迭代次数,优选地,设置初始种群数量为80
‑
160,迭代次数为100
‑
300;
[0150]
s340、确定适应度函数和选择策略,具体地,适应度函数取f=1/f,选择策略选轮盘赌规则,所有种群的适应度之和,盘赌规则,所有种群的适应度之和,p为人口数量,每个染色体被选择的可能性为计算每个染色体的右区间计算每个染色体的右区间随机生成r∈(0,1],若r∈(c
i
‑1,c
i
],染色体i将被选中进入子代,即下一次迭代的种群个体;
[0151]
s350、确定交叉算子,交叉方式取order crossover(ox),交叉算子的选择不唯一,不同算子的侧重点不同;
[0152]
s360、确定变异算子,变异方式选择在父代(即当前种群的染色体),选择两个切点,交换这两个切点所在列第二行到第五行的值;
[0153]
s370、用matlab中的ga工具箱对数学模型计算,包括对种群进行交叉、变异,根据适应度函数选择一定的后代,一直循环直至到达迭代终止条件;
[0154]
骤s350和s360的交叉算子和变异算子概率设置如下:
[0155][0156]
k为一个正常数,f
avg
为所有适应度的平均值;
[0157]
步骤s330、s340、s350和s360并行执行。
[0158]
s400、输出,输出步骤s200或s300得到的全局解及相应的设备服务序列至现实生产系统中。
[0159]
基于上述实施例,发明人提供了一种传统集装箱码头辅助调度系统,如图2所示,
包括:
[0160]
数据存储模块,存储从现实生产系统获取的生产计划,包括船舶计划表,船舶配载表;
[0161]
机械高精度定位模块,获取设备的位置信息并存储到数据存储模块,提高数学模型的准确性;
[0162]
数据调用模块,调用数据存储模块中的现实生产系统中的生产计划、相关设备信息和位置信息,为求解数学模型做准备;
[0163]
数学建模模块,根据生产系统实际情况将调度问题抽象为hfsp(混合流水车间问题),然后对此问题进行数学建模;
[0164]
商业求解器模块,使用数据调用模块的数据,对数学建模模块中的数学模型求解,商业求解器模块使用商业求解器ilog cplex,采用的求解方法包括运筹学方法,优选穷举法、分支定界法;
[0165]
智能调度算法模块,当商业求解器无法求解该数学模型时,同时使用数据调用模块的数据,智能调度算法采用启发式算法,对数学建模模块中的数学模型求解;
[0166]
数据输出模块,将商业求解器模块或智能调度算法模块得到的解与相应的决策变量转化为相应的调度指令,返回到现实生产系统中;
[0167]
数据存储模块存储从现实生产系统中获取生产计划、相关设备信息和通过机械高精度定位模块的设备的位置信息,数据调用模块从数据存储模块中获取数据,为商业求解器模块和智能调度算法模块提供相关数据,商业求解器模块和智能调度算法使用上述传统集装箱码头联合调度方法对数学建模模块中的数学模型求解,数据输出模块向现实生产系统返回调度指令,在不影响现有生产计划的条件下提供辅助策略,根据实际情况调整调度策略。
[0168]
以上详细描述了本发明的较佳具体实施例。应当理解,本领域的普通技术人员无需创造性劳动就可以根据本发明的构思作出诸多修改和变化。因此,凡本技术领域中技术人员依本发明的构思在现有技术的基础上通过逻辑分析、推理或者有限的实验可以得到的技术方案,皆应在由权利要求书所确定的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1