一种光电跟踪系统目标模拟装置及方法与流程
1.本发明涉及光电技术领域,尤其涉及一种光电跟踪系统目标模拟装置及方法。
背景技术:
2.光电跟踪系统广泛应用在边防监控、武器装备和反无人机等领域,其各项性能的测试十分重要。光电跟踪系统主要测试跟踪精度,在稳态跟踪中的最大加速度,光电系统图像处理算法的跟踪信噪比、虚警率、识别概率等指标。通常来说,在测试这些指标时,需要利用各种靶机进行校飞试验,测试成本极高,而且因为天气原因试验往往不可重复,对于调试和排查故障带来了极大的困难,影响研制进度。
3.对此,在调试阶段,一种可以模拟校飞试验的装置对于光电跟踪系统的调试十分重要。
技术实现要素:
4.本发明目的在于提供一种光电跟踪系统目标模拟装置及方法,解决现有技术存在的测试成本极高、故障排查难、影响研制进度的问题。
5.本申请一方面提供一种光电跟踪系统目标模拟装置,其包括:图像输入和输出模块、串口接收和转发模块及芯片模块,图像输入和输出模块和相机相连,用于接收图像信息,图像输入和输出模块与光电跟踪系统的显控计算机相连,用于将叠加模拟目标后的图像数据传递给显控计算机;串口接收和转发模块与伺服机构连接,用于接收光电跟踪系统的转台信息,串口接收和转发模块与显控计算机连接,将转台信息转发给光电跟踪系统的计算机;芯片模块与图像输入和输出模块连接,芯片模块与串口接收和转发模块连接,芯片模块用于根据光电转台实时的方位和俯仰信息,将模拟目标实时的叠加在图像上;芯片模块与显控计算机,接收目标的光学特性和运动特性信息。
6.其中,还包括千兆以太网模块,所述显控计算机通过千兆以太网模块与芯片模块连接,用于向芯片模块输入光电模拟目标的光学特性和运动特性。
7.其中,所述芯片模块为zynq芯片模块。
8.其中,所述zynq芯片模块包括相连接的双核处理器和fpga组成,所述双核处理器用于模拟目标与接收相机图像信息的叠加及目标运动轨迹的计算,所述fpga用于图像输入和输出的程序控制及串口接收转发的程序控制。
9.其中,所述处理器为双核arm a9处理器。
10.其中,所述显控计算机对于图像中的目标进行识别跟踪后,通过芯片模块调节伺服机构,将目标调节至图像中心。
11.本申请另一方面提供给一种光电跟踪系统的目标模拟方法,其包括以下步骤:
12.将目标模拟装置与相机和伺服机构相连,再与显控计算机相连,将光电系统的图像信息和伺服信息,分别通过图像输入和输出模块、串口接收和转发模块输入到目标模拟装置;
13.通过目标模拟装置将目标的在图像中位置、角度计算完毕后,将根据光电转台实时的方位和俯仰信息,将模拟目标实时的叠加在图像上;
14.将叠加模拟目标后的图像数据及伺服信息传递给显控计算机,通过显控计算机对于图像中的目标进行识别跟踪,以判断目标在图像中位置;
15.根据目标在在图像中位置,以决定是否调整目标。
16.其中,在步骤根据目标在在图像中位置,以决定是否调整目标中,
17.如果目标不在图像中心,则调节伺服机构,将目标调节至图像中心。
18.从上述方案可以看出,本发明具有如下有益效果:
19.本申请中,通过图像输入和输出模块和相机相连,用于接收图像信息,通过串口接收和转发模块与伺服机构连接,接收转台的方位和俯仰信息,通过芯片模块用于根据光电转台实时的方位和俯仰信息,将模拟目标实时的叠加在图像上,且芯片模块可以接收目标的光学特性和运动特性信息;显控计算机对于图像中的目标进行识别跟踪后,如果目标不在图像中心,则调节伺服机构,将目标调节至图像中心。由于伺服角度的改变,模拟装置叠加的目标在图像的位置也有改变,最终模拟的目标与伺服转动的角度相吻合,实现了目标模拟的目的,通过模拟无人机等目标的光学特性、运动特性,而且与光电系统进行联动,能够在光电跟踪产品的研制阶段充分的验证光电跟踪系统的各项性能,加快研制进度,减少研制经费。
附图说明
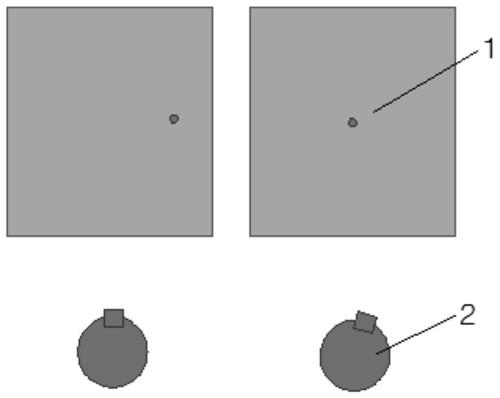
20.图1是本申请光电跟踪系统目标模拟装置目标静止模式的模拟示意图;
21.图2是本申请光电跟踪系统目标模拟装置目标运动模式的模拟示意图;
22.图3是本申请光电跟踪系统目标模拟装置与光电跟踪系统的系统连接方式示意图。
23.1.转台;2.图像。
具体实施方式
24.为了最大程度的模拟光电跟踪系统的跟踪目标(例如无人机),本申请提供一种基于zynq为主处理器的目标模拟装置,该装置串联在相机与计算机之间,根据设定的目标运动轨迹,将模拟目标叠加在相机拍摄的图像上,用于光电跟踪系统的各项性能的测试。
25.如图3所示,本申请提供的一种光电跟踪系统目标模拟装置,包括:图像输入和输出模块、串口接收和转发模块及芯片模块,图像输入和输出模块和相机相连,用于接收图像信息,图像输入和输出模块与光电跟踪系统的显控计算机相连,用于将叠加模拟目标后的图像数据传递给显控计算机;串口接收和转发模块与伺服机构连接,用于接收光电跟踪系统的转台信息,串口接收和转发模块与显控计算机连接,将转台信息转发给光电跟踪系统的计算机;芯片模块与图像输入和输出模块连接,芯片模块与串口接收和转发模块连接,芯片模块用于根据光电转台实时的方位和俯仰信息,将模拟目标实时的叠加在图像上,芯片模块与显控计算机,接收目标的光学特性和运动特性信息。具体地,图像输入和输出模块具体为cameralink输入和输出模块。
26.上述实施例中,通过图像输入和输出模块和相机相连,用于接收图像信息,通过串
口接收和转发模块与伺服机构连接,接收转台的方位和俯仰信息,通过芯片模块用于根据光电转台实时的方位和俯仰信息,将模拟目标实时的叠加在图像上,且芯片模块可以接收目标的光学特性和运动特性信息;显控计算机对于图像中的目标进行识别跟踪后,如果目标不在图像中心,则调节伺服机构,将目标调节至图像中心。由于伺服角度的改变,模拟装置叠加的目标在图像的位置也有改变,最终模拟的目标与伺服转动的角度相吻合,实现了目标模拟的目的。
27.优选地,还包括千兆以太网模块,所述显控计算机通过千兆以太网模块与芯片模块连接,用于向芯片模块输入光电模拟目标的光学特性和运动特性,通过千兆以太网模块,信息和指令传输速度更快,满足目标实时模拟的需求,另外通过千兆以太网模块,显控计算机也可控制模拟装置的各个功能,如向芯片模块和伺服机构发送转动一定角度的指令,伺服角度的改变,相应地,模拟装置叠加的目标在图像的位置也有改变。
28.具体地,所述芯片模块为zynq芯片模块;所述zynq芯片模块包括相连接的双核处理器和fpga组成,所述双核处理器用于模拟目标与接收相机图像信息的叠加及目标运动轨迹的计算,所述fpga用于图像输入和输出的程序控制及串口接收转发的程序控制。本申请主要一块基于xilinx zynq 7045为主处理器的电路板构成。
29.具体地,所述处理器为双核arm a9处理器。
30.arm主要负责模拟目标与接收相机图像信息的叠加,目标运动轨迹的计算,根据光电转台实时的方位和俯仰信息,将模拟目标实时的叠加在图像上。fpga主要负责cameralink的输入和输出的程序控制和串口接收转发的程序控制。
31.本申请中,显控计算机对于图像中的目标进行识别跟踪后,通过芯片模块调节伺服机构,将目标调节至图像中心。
32.本申请提供的实施例中,将目标模拟装置与相机和伺服机构相连,再与光电跟踪系统的显控计算机相连,光电系统的图像信息和伺服信息,分别通过cameralink接口和串口输入到模拟装置中,模拟装置将目标的在图像中位置、角度计算完毕后,将模拟光电目标的图像信息叠加到图像中,通过cameralink接口传输给显控计算机中,同时将伺服信息转发给显控计算机,显控计算机对于图像中的目标进行识别跟踪后,如果目标不在图像中心,则调节伺服,将目标调节至图像中心。由于伺服角度的改变,模拟装置叠加的目标在图像的位置也有改变,最终模拟的目标与伺服转动的角度相吻合。
33.本申请另一方面提供了一种光电跟踪系统的目标模拟方法,其包括以下步骤:
34.s1、将目标模拟装置与相机和伺服机构相连,再与显控计算机相连,将光电系统的图像信息和伺服信息,分别通过图像输入和输出模块、串口接收和转发模块输入到目标模拟装置;
35.s2、通过目标模拟装置将目标的在图像中位置、角度计算完毕后,将根据光电转台实时的方位和俯仰信息,将模拟目标实时的叠加在图像上;
36.s3、将叠加模拟目标后的图像数据及伺服信息传递给显控计算机,通过显控计算机对于图像中的目标进行识别跟踪,以判断目标在图像中位置;
37.s4、根据目标在在图像中位置,以决定是否调整目标。
38.在步骤s4中,
39.如果目标不在图像中心,则调节伺服机构,将目标调节至图像中心。
40.进一步地,如图1所示,目标模拟装置产生的图像变化和跟踪静止目标时光电跟踪系的转动,模拟装置模拟目标在水平5
°
的位置静止不动,此时模拟装置在图像上叠加的目标则在图像右侧,当光电跟踪系统跟踪模拟目标时,光电跟踪系统向右转动,伺服角度增大,这时叠加的目标逐渐向中心靠拢,最终在5
°
时,模拟目标被叠加在图像中心位置,同时伺服停止运动。
41.如图2所示,模拟装置产生的图像变化和跟踪水平运动目标时光电跟踪系的转动,模拟装置模拟目标从0
°
到5
°
运动,光电跟踪系统从0
°
到5
°
随着模拟目标转动,目标始终在图像中心,当目标不在中心时,转台会加速或者减速,将目标调整至中心。
42.综上,本发明提供的光电跟踪系统目标模拟装置和方法,对于相机和光电跟踪系统转台信息的转发具有转发功能,可以结合用户输入的无人机的光学特性和运动特性,将模拟目标叠加在相应的位置上,并且根据转台信息和运动特性实时计算其在图像中的位置和角度;能够在光电跟踪产品的研制阶段充分的验证光电跟踪系统的各项性能,加快研制进度,减少研制经费。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1