一种基于机器视觉技术木块方向识别装置的制作方法
1.本实用新型利用机器视觉技术来识别木块的摆放方向,为木块的自动化上下料提供关键的方向信息,可以应用于木块生产加工领域。
背景技术:
2.在木材储备和加工行业,自动化和规模化的程度越来越高。批量进口的木材需要进一步的加工,做成半成品供其他中下游企业进行使用。在这种前期加工时时,都需要自动化设备进行操作。其中重要一步就是对木材进行规范性的上料,使上料的木块方向保持一致。一般在木块运来后都是呈码垛形式,每层的方向时一致的,要么是水平方向,要么是竖直方向。在用自动化设备进行取料时,事先要知道木块的水平或竖直方向才能正确的进行上料操作,而且这个识别速度一定要很快,不能过多低影响上下料效率,但当前还并没有发现有装置可以满足这个要求。
技术实现要素:
3.根据以上技术问题,本实用新型提出了一种基于机器视觉技术木块方向识别装置,其特征在于包括图像采集模块和图像处理模块,所述图像采集模块和图像处理模块连接,图像采集模块包括工业相机、镜头、光源,所述工业相机上侧安装有镜头,所述工业相机安装在支架上,所述工业相机一侧安装有光源,所述光源安装在升降支架上;所述图像处理模块为视觉工控机构。
4.所述工业相机和计算机连接,所述计算机设有信号触发模块。
5.所述光源为led光源
6.所述图像处理模块主要为视觉工控机和执行的算法软件。
7.一种基于机器视觉技术木块方向识别装置,其具体操作方法为:
8.(1)在木块传送场地上安装支架和伸缩支架,在将工业相机和光源分别安装在上面,然后将镜头安装在工业相机上,再根据测试需要将光源进行调整;
9.(2)工业相机监听到出发信号,工业相机通过光源照射进行图像采集,工业相机见拍摄到的信号传送给图像处理模块;
10.(3)图像处理模块对工业相机发送的图片进行边界点提取;
11.(5)对木块传送场地边界点的梯度方向进行统计,将360度分成n个,n根据需要进行设置,如:720个,每个代表0.5度,统计位,根据每个边界点的角度值统计到相应的统计位里面;
12.(6)对统计结果进行适当的平滑处理,可采用加权平均,即将每个统计位周边一定度数的值(如
±
5度以内的值)进行平均作为该统计位的值;
13.(7)选择最大值对应的统计位,并推算该统计位对应的角度(角度a),将角度a加上90度即为木块的方向;
14.(8)图像处理模块对木块方向进行计算,计算完毕后识别结果发送给观测人员。本
实用新型的有益效果为:本实用新型提出了一种基于机器视觉技术木块方向识别装置,该装置不但可以用来识别木块方向,也可以用来识别类似的应用场景,如砖块或其他产品等。本装置由图像采集模块和图像处理模块组成。图像采集模块主要包括工业相机、镜头、光源,图像处理模块主要为视觉工控机和执行的算法软件。该装置只需要采集一张图像就可以完成对方向的计算。
附图说明
15.图1为本实用新型工作流程图
16.图2为本实用新型算法流程图
17.图3为本实用新型木材方向计算结果图(细线的为提取的边界点,粗线为计算的方向)。
18.图4为本实用新型木材方向识别装置原理示意图。
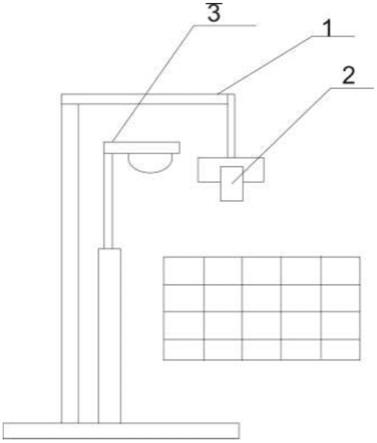
19.图5为本实用新型结构示意图。
20.如图,工业相机1、镜头2、光源3。
具体实施方式
21.实施例1
22.本实用新型提出了一种基于机器视觉技术木块方向识别装置,其特征在于包括图像采集模块和图像处理模块,所述图像采集模块和图像处理模块连接,图像采集模块包括工业相机、镜头、光源,所述工业相机上侧安装有镜头,所述工业相机安装在支架上,所述工业相机一侧安装有光源,所述光源安装在升降支架上;所述图像处理模块为视觉工控机构。所述工业相机和计算机连接,所述计算机设有信号触发模块。所述光源为led光源所述图像处理模块主要为视觉工控机和执行的算法软件。
23.实施例2
24.一种基于机器视觉技术木块方向识别装置,其具体操作方法为:
25.在木块传送场地上安装支架和伸缩支架,在将工业相机和光源分别安装在上面,然后将镜头安装在工业相机上,再根据测试需要将光源进行调整;
26.工业相机监听到出发信号,工业相机通过光源照射进行图像采集,工业相机见拍摄到的信号传送给图像处理模块;
27.图像处理模块对工业相机发送的图片进行边界点提取;
28.对木块传送场地边界点的梯度方向进行统计,将360度分成n个,n根据需要进行设置,如:720个,每个代表0.5度,统计位,根据每个边界点的角度值统计到相应的统计位里面;
29.对统计结果进行适当的平滑处理,可采用加权平均,即将每个统计位周边一定度数的值(如
±
5度以内的值)进行平均作为该统计位的值;
30.选择最大值对应的统计位,并推算该统计位对应的角度(角度a),将角度a加上90度即为木块的方向;
31.图像处理模块对木块方向进行计算,计算完毕后识别结果发送给观测人员。
32.实施例3
33.图像采集模块位于木块平面的正上方,相机可以拍到大部分的木块区域,调整光源、镜头参数,使木块边界在图像中能够清晰的看到。另外将工控机连接到相机和外部的自动化设备。如果图4所示。
34.工作流程如下:
35.视觉工控机收到触发信号以后,则调度工业相机进行拍图。
36.收到拍到的图像以后,则对图像进行梯度计算,找出梯度值比较大的点,并将其作为颜色变化比较大的边界点。
37.对边界点的方向进行统计、滤波等操作,梯度方向多的点对应的统计值肯定最大,并根据梯度方向和木块方向垂直的关系,推算出木块方向。
38.将木块方向换成合理的值,发送给自动化上下料设备。
39.结论
40.该方法计算速度快,精度根据木块视觉情况会有所变化,一般都能控制在5度以内,对于识别木快是水平摆放还是竖直摆放完全能够满足要求。
41.以上显示和描述了本实用新型的基本原理和主要特征和本实用新型的优点。本实用新型提到的各个部件为现有领域常见技术,本行业的技术人员应该了解,本实用新型不受上述实施例的限制,上述实施例和说明书中描述的只是说明本实用新型的原理,在不脱离本实用新型精神和范围的前提下,本实用新型还会有各种变化和改进,这些变化和改进都落入要求保护的本实用新型范围内。本实用新型要求保护范围由所附的权利要求书及其等效物界定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1