用于动力机械的启动过程的方法和设备与流程
用于动力机械的启动过程的方法和设备
背景技术:
1.本公开涉及动力机械。更具体地,本公开涉及在用于动力机械的启动程序期间启用或禁用动力机械功能。出于本公开的目的,动力机械包括生成动力以完成一个具体任务或各种不同任务的任何类型的机械。一种类型的动力机械是作业车辆。作业车辆通常是具有诸如升降臂之类的作业装置的自行式车辆(但是一些作业车辆可以具有其他作业装置),所述作业装置可以被操纵以执行作业功能。仅举几个示例,作业车辆包括装载机、挖掘机、多功能车辆、拖拉机和挖沟机。
2.一些动力机械具有需要操作者输入密码以解锁某些动力机械功能的操作系统(例如,无钥匙安全系统),所述某些动力机械功能例如是对动力机械的动力源的操作或对辅助液压系统的操作。由于所用的软件的复杂性或其他因素,操作者可能会在显示器(或一般地为操作系统)的初始激活与显示器(或一般地为操作系统)的可用性之间经历延迟(例如,20秒或更长时间的延迟)以用于输入代码以启用相关的功能。尽管用于解锁动力机械功能的代码的要求可以提供许多益处,包括通过帮助仅允许对给定动力机械的授权操作来提供益处,但是系统启动中的延迟也可能延迟操作者的作业开始,并因此可能是不受欢迎的。
3.上面的讨论仅是为总体的背景信息而提供的,并不旨在用于帮助确定所要求保护的主题的范围。
技术实现要素:
4.所公开的主题的实施例可以使用启动模式来在用于动力机械的启动过程期间提供对某些动力机械功能的访问。在一些实施例中,这可以允许操作者在启动过程期间执行某些操作,所述启动过程期间包括在显示器可以用于输入密码以进行完全操作之前。在一些实施例中,启动模式的许可可以允许操作者在启动过程期间仅访问受限的动力机械功能。
5.一些实施例提供了一种操作具有输入装置(例如,显示器)的动力机械的方法。对于输入装置可以初始化输入装置启动过程。在所述输入装置启动过程期间可以将所述动力机械自动地置于启动模式。可以根据所述启动模式的许可来对所述动力机械功能提供受限的访问。在所述输入装置启动过程完成之后,可以请求授权出示(例如,密码)以允许访问附加的动力机械功能。
6.在一些实施例中,启动模式的许可可以包括对动力机械的动力源的操作。
7.在一些实施例中,启动模式的许可不准许选择液压操作。
8.在一些实施例中,在初始化过程之后可以被允许的附加的动力机械功能可以包括全动力机械功能。
9.在一些实施例中,初始化过程可以包括用于输入装置(例如,显示器)的启动过程,在所述用于输入装置的启动过程期间,显示器(286)未被配置以用于接收用于控制动力机械(200)的用户输入。
10.一些实施例提供了一种用于动力机械的操作系统。处理器可以被配置以用于在启
动过程期间启用所述动力机械在启动模式下的操作。所述启动模式能够选择性地配置成在所述启动过程期间自动地提供对以下项中的任一项的访问:无动力机械功能、受限的动力机械功能和全动力机械功能。
11.在一些实施例中,当所述启动过程被配置以用于提供对无动力机械功能或受限的动力机械功能的访问时,在所述启动过程完成时可以请求输入授权出示(例如,密码)以访问全动力机械功能。
12.在一些实施例中,在以下项中的一项或多项的情况下以默认启动模式启用动力机械的操作:在发出密码请求之后,预定时间量到期、输入密码错误、达到预定连续次数。
13.在一些实施例中,与启动模式相比,默认启动模式可以提供对动力机械功能的减少的访问。
14.在一些实施例中,输入装置可以以能够操作的方式连接到动力机械。启动过程包括输入装置启动过程,在所述输入装置启动过程期间,不启用输入装置(286)以用于用户输入。
15.在一些实施例中,输入装置可以是显示装置。
16.在一些实施例中,启动过程可以被配置以用于准许对动力机械的动力源的操作,但不准许选择液压操作。
17.一些实施例提供一种动力机械。动力机械可以包括动力源和操作者站。一个或多个作业元件可以被配置以用于基于来自动力源的动力来进行操作。输入装置可以被配置以用于接收由在操作者站中的操作者所发出的用于控制动力机械的输入。控制系统可以包括被配置以用于实施启动过程的处理器装置。启动过程可以包括初始化用于输入装置的初始化过程,并且可以包括在初始化过程期间将动力机械自动地置于启动模式。在启动模式中,处理器装置可以被配置以用于根据启动模式的许可来限制对动力机械功能的访问。
18.在一些实施例中,启动模式的许可可以准许对动力机械的动力源的操作、但不准许选择其他动力机械功能。
19.在一些实施例中,启动模式的许可不准许动力机械的选择液压操作。
20.提供该发明内容和摘要以便以简化形式介绍一些概念,这些概念将在下面的具体实施方式中被进一步描述。该发明内容既不旨在标识所要求保护的主题的关键的特征或必要特征,也不旨在用于帮助确定所要求保护的主题的范围。
附图说明
21.图1是示出了可以在其上有利地实施本公开的实施例的代表性动力机械的功能系统的框图。
22.图2至图3示出了可以在其上实施所公开的实施例的呈滑移转向装载机形式的代表性动力机械的透视图。
23.图4是示出诸如在图2至图3所示的装载机之类的装载机的动力系统的部件的框图。
24.图5是示出了可以在其上实施所公开的实施例的类型的、用于与动力机械一起使用的操作系统的各方面的框图。
25.图6是示出了可以在其上实施所公开的实施例的类型的、用于与动力机械一起使
用的方法的各方面的框图。
具体实施方式
26.参考示例性实施例来描述和说明在本讨论中公开的概念。然而,这些概念在其应用中不限于说明性实施例中的构造的细节和部件的布置,并且能够以各种不同的其他方式被实施或实践。本文中的术语用于描述的目的,并且不应被视为进行限制。如本文所使用的诸如“包括”、“包含”、“具有”之类的词及其变型旨在涵盖这些词之后列出的项目、所列项目的等同物以及附加项目。
27.伴随传统设计,动力机械可以被装备以提供一系列的计算机控制的动力机械功能(例如,对发动机动力的访问——即,启动发动机、牵引操作、液压操作、气候控制等的能力)。这样的动力机械可以具有控制这些功能并为操作者提供一个或多个接口以接收操作者输入的各种不同的计算机化的装置。在一些机械上,这些计算机化的装置具有被设计成防止对机械的未授权的操作的安全特征,例如要求操作者在机器能被启动或以其他方式操作之前输入密码。在本讨论中为了清楚起见,表述“初始化过程”或“计算机初始化过程”是指计算机化的装置在首次被供能以准备其正常操作时由该计算机化的装置所采取的步骤。此外,表述“启用过程”是指由操作者为解锁动力机械上的安全特征而采取的活动,这例如通过输入密码或类似类型的活动而实现。
28.为操作者提供输入装置以解锁安全系统的这些装置的一些装置或全部装置在其自身的启动或初始化过程期间可能不被启用来提供任何动力机械功能。例如,一些动力机械可能请求操作者将密码(或“解锁”代码)输入到操作系统的相关输入装置中以启用任何动力机械功能。该请求可能有助于防止对动力机械功能的未经授权的访问,但是在计算机化的装置正在执行其初始化过程时,该请求也可能延迟作业现场操作的开始。例如,当被配置以用于接收密码的显示器正在运行其初始化过程时,因为显示器根本没有准备好接收来自操作者的输入,因此操作者可能无法输入密码。因此,虽然操作者可能已准备好作业,但是包括启动发动机在内的对动力机械的主动操作是不可能的,至少要到显示器完成其初始化例程之后才可以。这可能导致部分动力机械操作者的不耐烦或沮丧、以及延迟生产活动。因此,在计算机初始化过程期间提供对某些(例如,受限的)动力机械功能的访问可能是有用的,所述计算机初始化过程期间包括在输入密码之前,所述密码可能是动力机械操作的完全和持续运行所需要的。
29.本文公开的一些实施例可以解决这些需要和其他需要。例如,一些实施例可以在用于显示器或其他输入装置的初始化过程期间使用用于动力机械的临时安全旁路模式。在临时安全旁路模式期间,可以启用有限范围的动力机械功能,从而在一个或多个计算机化的装置执行初始化过程时,可以临时允许操作者命令动力机械执行某些操作。一旦初始化过程已经完成,则可以提示操作者及时将密码输入显示器或其他输入装置,以启用附加的动力机械功能并防止动力机械停止功能。输入密码将终止临时安全旁路模式,并允许动力机械的正常操作。
30.在不同的实施例中,在临时安全旁路模式期间可以提供不同范围的动力机械功能,这取决于动力机械为初始化旁路模式所指定的许可。例如,一些临时安全旁路模式可以允许操作者命令机械启动其发动机,但可能不允许操作者命令动力机械的液压系统的功
能,或者初始化旁路模式可以允许访问一些液压操作或执行器,而不允许访问其他。作为另一示例,某些初始化旁路模式可以允许访问除了一组选定的高级功能之外的所有功能,所述一组选定的高级功能例如是可以通过显示器来选择或调整的一组特征,其在相关启动过程期间是不可操作的。在一些实施例中,具体的临时安全旁路模式的许可可以是可定制的,例如通过密码保护的设置菜单来定制。
31.如本文所使用的,“动力机械功能”通常是指动力机械的基于运动和动力的操作,例如动力源(例如,发动机)的操作、对来自动力源的动力的访问、牵引元件的使用、液压设备的致动、升降臂或其他装置的运动等。因此,例如,“动力机械功能”应区别于“操作系统功能”,该操作系统功能涉及显示屏或其他输入/输出装置、基于计算机的安全系统(例如,密码或操作者在场系统)、中央处理单元或其他控制器等的操作。然而,值得注意的是,某些动力机械功能可能必须包括基于计算机的功能,例如用于控制器、传感器、开关、致动器和信号装置的电子操作。因此,在初始化过程期间对动力机械功能的约束有时可能必然包括对一些计算机化的系统操作的约束。此外,尽管以下示例一般地涉及在初始化过程期间对动力机械功能的限制,但一些实施例可以包括对操作系统功能的类似实施的限制。
32.这些概念可以在如将在下文所描述的各种动力机械上被实施。在图1中以框图的形式示出了可以实施实施例的代表性动力机械,并且在公开任何实施例之前,在图2至图3中示出并且在下文中描述了这种动力机械的一个示例。为了简洁起见,仅示出和讨论了一种动力机械作为代表性动力机械。然而,如上所述,可以在包括与图2至图3所示的代表性动力机械不同类型的动力机械的任何数量的动力机械上实施下面的实施例。为了本讨论的目的,动力机械包括框架、至少一个作业元件、和可以向作业元件提供动力以完成作业任务的动力源。一种类型的动力机械是自行式作业车辆。自行式作业车辆是一类包括框架、作业元件和可以向作业元件提供动力的动力源的动力机械。所述作业元件中的至少一个作业元件是用于使动力机械在动力下移动的发动系统。
33.图1是示出了动力机械100的基本系统的框图,该动力机械可以是多种不同类型的动力机械中的任一种,在该动力机械上可以有利地结合下文讨论的实施例。图1的框图标识了动力机械100上的各种不同系统以及各种不同部件和系统之间的关系。如上所述,在最基本的层面上,用于本讨论的目的的动力机械包括框架、动力源和作业元件。动力机械100具有框架110、动力源120和作业元件130。因为图1中所示的动力机械100是自行式作业车辆,因此所述动力机械100还具有牵引元件140和操作者站150,该牵引元件140本身是被设置成使动力机械在支撑表面上移动的作业元件,该操作者站150提供用于控制动力机械的作业元件的操作位置。控制系统160被设置成与其他系统相互作用,从而至少部分地响应于由操作者提供的控制信号来执行各种不同的作业任务。
34.某些作业车辆具有可以执行专门任务的作业元件。例如,一些作业车辆具有升降臂,诸如铲斗之类的机具例如通过销钉连接装置附接到该升降臂。可以操纵作业元件(即,升降臂)以定位机具来执行任务。在一些情况下,机具可以例如通过使铲斗相对于升降臂旋转而相对于作业元件定位,从而进一步定位该机具。在这样的作业车辆的正常操作下,铲斗将用于被附接并且处在使用中。通过拆卸机具/作业元件组合并重新组装另一机具来代替原先的铲斗,这样的作业车辆能够接受其他机具。然而,其他作业车辆将与各种各样的机具一起使用,并且具有诸如图1所示的机具接口170之类的机具接口。最基本地,机具接口170
是框架110或作业元件130与机具之间的连接机构,该连接机构可以简单地是用于将机具直接附接到框架110或作业元件130的连接点,或者可以更加复杂,如下文所讨论的。
35.在一些动力机械上,机具接口170可以包括机具承载件,该机具承载件是能够移动地附接到作业元件的物理结构。机具承载件具有接合特征和锁定特征,以接受多个不同机具中的任何一个并将所述多个不同机具中的任何一个固定到作业元件。这种机具承载件的一个特性是,一旦机具被附接到该机具承载件,该机具承载件便被固定到该机具(即,不能相对于机具移动),并且当机具承载件相对于作业元件移动时,机具与机具承载件一起移动。如本文中所使用的术语“机具承载件”不仅仅是枢转连接点,而且是特别地旨在用于接受并被固定到各种不同的机具的专用装置。机具承载件本身能够安装到诸如升降臂之类的作业元件130或框架110。机具接口170还可以包括一个或多个动力源,所述动力源用于向机具上的一个或多个作业元件提供动力。一些动力机械可以具有带有机具接口的多个作业元件,每个作业元件可以但不必都具有用于接纳机具的机具承载件。一些其他动力机械可以具有带有多个机具接口的作业元件,使得单个作业元件可以同时接纳多个机具。这些机具接口中的每一个可以但不必都具有机具承载件。
36.框架110包括如下物理结构,该物理结构可以支撑被附接到该框架110或被定位在该框架110上的各种其他部件。框架110可以包括任意数量的单独部件。一些动力机械具有刚性框架。即,该框架的任何部位都不能相对于该框架的另一部位移动。其他动力机械具有可以相对于框架的另一部分移动的至少一个部分。例如,挖掘机可以具有相对于下框架部分旋转的上框架部分。其他作业车辆具有铰接框架,使得框架的一部分相对于另一部分枢转以实现转向功能。
37.框架110支撑动力源120,该动力源120被构造以用于向包括一个或多个牵引元件140的一个或多个作业元件130提供动力,并且在一些情况下,该动力源能够经由机具接口170来提供由被附接的机具所使用的动力。来自动力源120的动力可以被直接提供至作业元件130、牵引元件140和机具接口170中的任一者。可替代地,来自动力源120的动力可以被提供至控制系统160,该控制系统160又选择性地向能够使用该动力以执行作业功能的元件提供动力。用于动力机械的动力源通常包括诸如内燃机之类的发动机、和诸如机械变速器或液压系统之类的动力转换系统,该动力转换系统被构造以用于将来自发动机的输出转换成可被作业元件使用的动力形式。可以将其他类型的动力源结合到动力机械中,所述其他类型的动力源包括电源或通常被称为混合动力源的动力源组合。
38.图1示出了被指定为作业元件130的单个作业元件,但是各种不同的动力机械可以具有任意数量的作业元件。通常地,作业元件附接到动力机械的框架并且在执行作业任务时能够相对于框架移动。另外,牵引元件140是作业元件的特殊情况,这是因为牵引元件的作业功能通常是使动力机械100在支撑表面上移动。牵引元件140被示出为与作业元件130分离,这是因为许多动力机械除了牵引元件之外还具有附加作业元件,但是并非总是这种情况。动力机械可以具有任意数量的牵引元件,所述牵引元件中的一些或全部可以从动力源120接收动力以推进该动力机械100。牵引元件可以是例如履带组件、附接到车轴的轮、和类似部件。牵引元件可以安装到框架,使得牵引元件的移动被限制为围绕车轴的旋转(使得通过滑移动作来实现转向),或者可替代地,牵引元件能够枢转地安装到框架以通过使牵引元件相对于框架枢转来完成转向。
39.动力机械100包括操作者站150,所述操作者站150包括操作位置,操作者可以从该操作位置控制动力机械的操作。在一些动力机械中,由封闭的驾驶室或部分封闭的驾驶室限定操作者站150。可以实施所公开的实施例的一些动力机械可以没有上述类型的驾驶室或操作者室。例如,步行自走式装载机可以没有驾驶室或操作者室,而是具有用作操作者站的操作位置,从该操作者站可以正确地操作动力机械。更广泛地,除了作业车辆之外,动力机械可以具有不必类似于上面提到的操作位置和操作者室的操作者站。此外,诸如动力机械100和其他的一些动力机械不管是否具有操作者室或操作者位置,都能够被远程操作(即,从定位在远处的操作者站进行操作),这可以作为对位于动力机械上的操作者站或与动力机械相邻的操作者站的替代或附加,所述一些动力机械。这可以包括如下应用,其中,可以从与联接至动力机械的机具相关联的操作位置操作动力机械的操作者控制的功能中的至少一些功能。可替代地,对于一些动力机械可以设置远程控制装置(即,远离动力机械和与动力机械联接的任何机具两者),该远程控制装置能够控制动力机械上的操作者控制的功能中至少一些功能。
40.图2至图3示出了装载机200,该装载机200是图1中示出的动力机械类型的一个具体示例,其中可以有利地采用下文所讨论的实施例。装载机200是滑移转向装载机,该滑移转向装载机是具有牵引元件(在这种情况下,为四个轮)的装载机,该牵引元件经由刚性车轴安装至装载机的框架。此处,术语“刚性车轴”是指如下事实:滑移转向装载机200不具有任何牵引元件,所述牵引元件可以旋转或转向以帮助该装载机完成转弯。取而代之的是,滑移转向装载机具有驱动系统,该驱动系统为装载机每一侧的一个或多个牵引元件独立地提供动力,使得通过向每一侧提供不同的牵引信号,该机械将趋于在支撑表面上滑移。这些变化的信号甚至可以包括向装载机的一侧的(一个或多个)牵引元件提供动力以使装载机在向前的方向上移动、以及向装载机另一侧的(一个或多个)牵引元件提供动力以使装载机在相反的方向上运行,使得该装载机将围绕装载机自身印迹为中心的半径进行转弯。术语“滑移转向”传统上是指具有如上所述的以轮作为牵引元件的滑移转向的装载机。然而,应该说明的是,许多履带式装载机即使没有轮也可以通过滑移来完成转弯,并且在技术上也是滑移转向装载机。出于此讨论的目的,除非另有说明,否则术语“滑移转向”不应视为将讨论的范围限制于以轮作为牵引元件的那些装载机。相应地,尽管本文所讨论的一些示例动力机械被呈现为滑移转向动力机器,但是可以在各种不同的其他动力机器上实施本文所公开的一些实施例。例如,可以在不通过滑移来完成转弯的紧凑型装载机或紧凑型挖掘机上实施一些实施例。
41.装载机200是图1中广泛示出并如上所论述的动力机械100的一个具体示例。为此,以下描述的装载机200的特征包括与图1中所使用的附图标记大致类似的附图标记。例如,装载机200被描述为具有框架210,就像动力机械100具有框架110一样。滑移转向装载机200在本文被描述为用于提供对理解在其中可以实施以下所述的与履带组件和用于将履带组件安装到动力机械的安装元件有关的实施例的环境的参考。装载机200不应被认为尤其是对于装载机200在本文已经描述的特征描述的限制,这些特征对于所公开的实施例不是必不可少的,并因此可以被包括或可以不被包括在除了可以有利地实施下文公开的实施例的装载机200之外的动力机械中。除非另外特别说明,否则可以在各种不同的动力机械上实施下文公开的实施例,且装载机200仅是这些动力机械中的一个。例如,仅举几个示例,可以在
诸如各种不同的其他装载机、挖掘机、挖沟机和推土机之类的许多其他类型的作业车辆上实施下文讨论的概念中的一些或全部概念。
42.装载机200包括支撑动力系统220的框架210,该动力系统能够生成动力或以其他方式提供动力以操作该动力机械上的各种不同的功能。出于说明的目的,在框架210的一侧上,以框图的形式示出动力系统220,但是该动力系统220位于框架210内。框架210还支撑由动力系统220提供动力并可以执行各种不同作业任务的呈升降臂组件230形式的作业元件。由于装载机200是作业车辆,因此框架210还支撑牵引系统240,所述牵引系统240也由动力系统220提供动力并且可以在支撑表面上推进该动力机械。升降臂组件230继而支撑机具接口270,该机具接口270包括机具承载件272和动力联接器274,其中所述机具承载件272能够接纳各种不同的机具并将所述机具固定到装载机200以用于执行各种不同的作业任务,机具可以联接到所述动力联接器274以将动力选择性地提供给可能连接到装载机的机具。动力联接器274可以提供液压动力源或电动力源,或液压动力源和电动力源两者。装载机200包括限定操作者站255的驾驶室250,其中操作者可以从该操作者站255操纵各种不同的控制装置260以使动力机械执行各种不同的作业功能。驾驶室250可以围绕延伸穿过安装件254的轴线向后枢转,以根据维护和修理的需要来提供对动力系统部件的访问。
43.操作者站255包括操作者座椅258和多个操作输入装置,该操作输入装置包括操作者可以操纵以控制各种不同机械功能的控制杆260。操作者输入装置可以包括按钮、开关、杆、滑块、踏板、和可以是诸如手动操作杆或脚踏板之类的独立装置或被结合到手柄或显示面板中的类似装置,包括可编程输入装置。操作者输入装置的致动可以生成呈电信号、液压信号和/或机械信号形式的信号。响应于操作者输入装置生成的信号被提供至动力机械上的各种不同部件,以控制动力机械上的各种不同功能。经由操作者输入装置而被控制的动力机械100的功能中包括对牵引元件219、升降臂组件230、机具承载件272的控制,以及向以能够操作的方式联接至该机具的任何机具提供信号。
44.装载机可以包括人机界面,该人机界面包括设置在驾驶室250中的显示装置,以操作者可以感知的形式给出与动力机械的操作相关的信息的指示,例如,声音指示和/或视觉指示。声音指示可以被形成为蜂鸣、铃铛等形式或通过口头交流来进行。视觉指示可以被形成为图形、灯、图标、仪表、字母数字符号等形式。显示器可以提供专用指示,例如警告灯或仪表;或者可以动态地提供可编程信息,包括诸如各种尺寸和功能的监测器之类的可编程显示装置。显示装置可以提供诊断信息、故障排除信息、指导信息、以及辅助操作者对动力机械或联接至该动力机械的机具进行操作的各种不同其他类型的信息。还可以提供对操作者可能有用的其他信息。诸如步行自走式装载机之类的其他动力机械可以没有驾驶室、操作者室或座椅。通常相对于操作者最适合操纵操作者输入装置的位置来限定在这样的装载机上的操作者位置。
45.可以包括下文讨论的实施例和/或与下文讨论的实施例相互作用的各种不同动力机械可以具有支撑各种不同作业元件的各种不同的框架部件。本文讨论的框架210的元件是出于说明性目的而提供的,并且框架210不是可以在其上实施实施例的动力机械可以采用的唯一框架类型。装载机200的框架210包括框架的底架或下部分211和框架的由底架支撑的主框架或上部分212。装载机200的主框架212在一些实施例中例如通过紧固件或通过将底架焊接到主框架而附接到底架211。或者,主框架和底架可以一体形成。主框架212包括
位于主框架的两侧并且朝向该主框架的后部的一对直立部分214a和214b,所述一对直立部分214a和214b支撑升降臂组件230,并且该升降臂组件230枢转地附接到所述一对直立部分214a和214b。升降臂组件230示例性地销钉连接到直立部分214a和214b中的每一个。出于此讨论的目的,升降臂组件230和直立部分214a和214b上的安装特征以及安装硬件(包括用于将升降臂组件销钉连接到主框架212的销钉)的组合统称为接头216a和216b(每个直立部分214上定位一个接头)。接头216a和216b沿着轴线218对齐,使得升降臂组件能够相对于框架210围绕轴线218枢转,如下文所讨论的。其他动力机械可以不包括在框架的两侧的直立部分,或者可以没有能够安装到位于框架的两侧并朝向框架的后部的直立部分的升降臂组件。例如,一些动力机械可以具有单个臂,该单个臂安装到动力机械的单侧或安装到动力机械的前端部或后端部。其他机械可以具有包括多个升降臂的多个作业元件,所述升降臂中的每一个都以其自身的配置安装至该机械。框架210还支撑位于装载机200的两侧上的呈轮219a至219d形式的一对牵引元件。
46.图2至图3所示的升降臂组件230是可以附接到动力机械的许多不同类型的升降臂组件的一个示例,其中所述动力机械例如是装载机200或可以在其上实施此讨论的实施例的其他动力机械。升降臂组件230是所谓的竖直升降臂,这表述升降臂组件230在装载机200的控制下能够相对于框架210沿着升降路径237可移动(即,升降臂组件可以被升起和降下),该升降路径237形成大致竖直路径。其他升降臂组件可以具有不同的几何形状,并且可以以各种不同方式联接到装载机的框架,从而提供与升降臂组件230的径向路径不同的升降路径。例如,其他装载机上的一些升降路径提供径向升降路径。其他升降臂组件可以具有可伸缩部分。其他动力机械可以具有附接到所述动力机械的框架的多个升降臂组件,其中每个升降臂组件都是彼此独立的。除非另有特别说明,否则此讨论中阐述的发明构思均不受联接至具体动力机械的升降臂组件的类型或数量的限制。
47.升降臂组件230具有设置在框架210的相反侧的一对升降臂234。升降臂234中的每一个的第一端部在接头216处枢转地联接到动力机械,并且升降臂中的每一个的第二端部232b在处于如图2所示的降下位置时定位在框架210的前方。接头216朝向装载机200的后部定位,使得升降臂沿着框架210的侧部延伸。当升降臂组件230在最小高度和最大高度之间移动时,由升降臂234的第二端部232b的行进路径限定升降路径237。
48.升降臂234中的每一个都具有第一部分234a和第二部分234b,每个升降臂234的第一部分234a在所述接头216中的一个接头处枢转地联接到框架210,该第二部分234b从与第一部分234a的连接部延伸到升降臂组件230的第二端部232b。升降臂234每一个都联接至横向构件236,该横向构件236附接至第一部分234a。横向构件236为升降臂组件230提供增加的结构稳定性。一对致动器238(所述致动器在装载机200上是被构造成从动力系统220接收加压流体的液压缸)在装载机200的两侧分别在可枢转接头238a和238b处枢转地联接至框架210和升降臂234两者。致动器238有时被单独统称为升降缸。致动器238的致动(即,伸出和缩回)使升降臂组件230绕接头216枢转,并由此沿着箭头237所示的固定路径被升起和降下。一对控制连杆217中的每一个控制连杆在框架210的两侧枢转地安装到框架210和升降臂232中的一个升降臂。控制连杆217有助于限定升降臂组件230的固定的升降路径。
49.一些升降臂(最明显的是挖掘机上的升降臂,但也可能是装载机上的升降臂)可以具有以可控制的方式相对于另一段枢转而不是像图2所示的升降臂组件230中的情况那样
一致地(即,沿着预定路径)移动的部分。一些动力机械具有带有单个升降臂的升降臂组件,例如在挖掘机,甚至一些装载机和其他动力机械中是已知的。其他动力机械可以具有多个升降臂组件,每个升降臂组件是彼此独立的。
50.机具接口270被设置成靠近升降臂组件234的第二端部232b。机具接口270包括机具承载件272,该机具承载件能够接受各种不同的机具并将所述机具固定到升降臂230。这样的机具具有被构造以用于与机具承载件272接合的互补的机械接口。机具承载件272枢转地安装在臂234的第二端部232b处。机具承载件致动器235以能够操作的方式联接升降臂组件230和机具承载件272,并且能够操作以使机具承载件相对于升降臂组件旋转。机具承载件致动器235示例性地为液压缸,并且通常被称为摆缸。
51.由于具有能够附接到多个不同机具的机具承载件,可以相对容易地完成从一个机具到另一个机具的改变。例如,具有机具承载件的机械可以在机具承载件和升降臂组件之间设置致动器,使得对机具进行移除或附接并不涉及从机具移除或附接致动器,也不涉及从升降臂组件移除或附接机具。机具承载件272设置用于将机具容易地附接到升降臂(或动力机械的其他部分)的安装结构,没有机具承载件的升降臂组件没有该安装结构。
52.一些动力机械可以具有机具或附接到该动力机械的机具类装置,例如通过销钉连接到具有倾斜致动器的升降臂,该倾斜致动器还直接联接到机具或机具类型的结构。这种以能够旋转的方式销钉连接到升降臂的机具的常见示例是铲斗,其中一个或多个摆缸附接到托架,所述托架(例如通过焊接或利用紧固件)被直接固定在铲斗。这样的动力机械没有机具承载件,而是在升降臂和机具之间具有直接连接。
53.机具接口270还包括机具动力源274,该机具动力源可用于连接至升降臂组件230上的机具。机具动力源274包括加压液压流体端口,机具可以以能够移除的方式联接至该加压液压流体端口。该加压液压流体端口选择性地提供加压液压流体以为机具上的一个或多个功能或致动器提供动力。机具动力源还可以包括电源,所述电源用于为机具上的电致动器和/或电子控制器提供动力。机具动力源274还示例性地包括电导管,该电导管与挖掘机200上的数据总线通信,以允许机具上的控制器与装载机200上的电子装置之间的通信。
54.框架210支撑并且大致包围动力系统220,使得动力系统220的各种部件在图2至图3中不可见。除其他事项之外,图4包括动力系统220的各种部件的图示。动力系统220包括一个或多个动力源222,所述动力源能够产生和/或存储用于各种机械功能的动力。在动力机械200上,动力系统220包括内燃机。其他动力机械可以包括发电机、可充电电池、各种不同的其他动力源、或可以为给定的动力机械部件提供动力的动力源的任何组合。动力系统220还包括动力转换系统224,该动力转换系统以能够操作的方式联接到动力源222。动力转换系统224继而联接到一个或多个致动器226,所述致动器可以执行动力机械上的功能。各种不同的动力机械中的动力转换系统可以包括各种不同部件,包括机械变速器、液压系统和类似部件。动力机械200的动力转换系统224包括一对静液压驱动泵224a和224b,其可以选择性地控制所述一对静液压驱动泵以便向驱动马达226a和226b提供动力信号。驱动马达226a和226b分别又以能够操作的方式联接到车轴,其中驱动马达226a联接到车轴228a和228b,而驱动马达226b联接到车轴228c和228d。车轴228a至228d又分别联接到牵引元件219a至219d。驱动泵224a和224b可以以机械的方式、以液压的方式和/或电联接到操作者输入装置,以便接收致动信号以用于控制驱动泵。
55.动力机械200中的驱动泵、马达和车轴的布置仅仅是这些部件的布置的一个示例。如上文所讨论的,动力机械200是滑移转向装载机,并因此动力机械的每一侧的牵引元件通过单个液压泵的输出、或通过如在动力机械200中的单个驱动马达或通过独立的驱动马达而被一起控制。可能有利的是,可以采用液压驱动泵和马达的各种不同其他配置和组合。
56.动力机械200的动力转换系统224还包括液压机具泵224c,该液压机具泵224c也以能够操作的方式联接至动力源222。液压机具泵224c以能够操作的方式联接至作业致动器回路238c。作业致动器回路238c包括升降缸238和摆缸235以及用于控制该作业致动器回路的致动的控制逻辑。控制逻辑响应于操作者输入而选择性地允许致动所述升降缸和/或摆缸。在一些机械中,作业致动器回路238c还包括用于将加压液压流体选择性地提供给所附接的机具的控制逻辑。动力机械200的控制逻辑包括呈串联布置的中央开口的有三个阀芯的阀。阀芯被布置成将(加压流体)优先赋予升降缸,然后给摆缸,并且然后使加压流体到所附接的机具。
57.出于说明性目的,以上提供了对动力机械100和装载机200的描述,以提供可以在其上实施下文讨论的实施例的说明性环境。尽管可以在例如由图1的框图中所示的动力机械100总体描述的动力机械上实施所讨论的实施例,并且更具体地在诸如履带式装载机200之类的装载机上实施,但是除非另外说明或陈述,否则下文讨论的概念并不意在将其应用限于以上具体描述的环境。
58.图5示出了控制系统280的各方面,该控制系统280可以用于控制诸如图2和图3的动力机械200之类的动力机械的某些操作。控制系统280包括控制器282,该控制器282可以例如被配置为与存储器284通信的通用或专用电子处理装置。总体上由输入装置286表示的一个或多个输入装置与控制器282通信。操作者可以操纵该输入装置286以便该输入装置向控制器282提供用户输入信号。在一些实施例中,所述输入装置中的由输入装置286表示的一个输入装置可以被配置为组合输入/输出装置,例如触摸屏显示装置,该组合输入/输出装置可以接收来自用户的输入,并且可以基于从控制器282或其他装置(未示出)接收到的信号向用户提供信息。
59.在不同的实施例中,用于动力机械的控制系统的控制器可以被配置以用于与很大范围的其他装置通信,以便提供指令、接收信号或以其他方式控制动力机械的操作。在图示的实施例中,例如,控制器282与启动机构288、动力转换系统224(也参见图4)、致动器226(也参见图4)、辅助液压系统290、和作业致动器回路238c(也参见图4)通信。如此布置,控制器282可以控制所述启动机构288来启动动力源222(也参见图4,动力源的示例为内燃机),并且能够选择性地操作所述动力转换系统224、致动器226、辅助液压系统290和/或作业致动器回路238c的控制装置,以便控制其他动力机械功能。通常,各种不同的其他配置也是可以的,包括其中控制器与动力机械的附加的或不同的功能子系统通信的配置。此外,虽然控制器282被示意性地示出为单个部件,但是其他配置可以包括分布在动力机械周围或其他地方的多个控制器。
60.还如上所讨论的,通过控制系统280或其他类似控制系统的适当配置,动力机械可以被配置成使得特定的(例如,全、受限或零)动力机械功能在初始化过程期间可用。此外,在适当情况下,只有在初始化过程完成之后,例如,在提供正确的密码之后,才可以使附加的动力机械功能可用。例如,控制器282可以被配置以用于实施启动模式,该启动模式在用
于输入装置286的初始化过程期间作为临时安全旁路模式来操作,在该启动模式下,在(例如,经由启动机构288的控制的)动力源222、(经由作业致动器回路238c的)辅助液压系统290、动力转换系统224、致动器226、除了辅助液压系统290之外的作业致动器回路238c的其他功能、或动力机械200的其他子系统中的一个或多个处仅启用选择动力机械功能。相应地,当动力机械200处于临时安全旁路模式时,某些其他动力机械功能可能不被控制器282启用(即,可能被锁定),这可以继续直到初始化过程完成并且在输入装置286处输出正确密码为止。
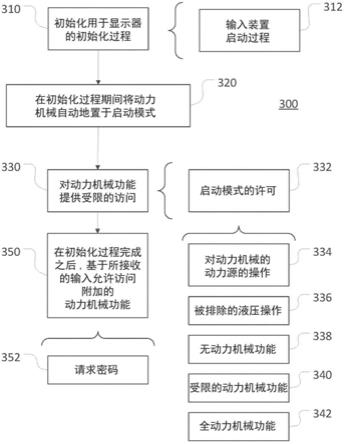
61.在一些实施例中,可以将本文所公开的原理实施为一种方法,该方法包括基于来自操作者或来自各种不同的传感器或其他模块的适当输入来可以由处理器装置至少部分地执行的计算机实施的方法。例如,如在图6中示出的用于操作动力机械的方法300可以包括初始化310用于输入装置(诸如,触摸屏或其他显示器)的初始化过程。初始化过程的初始化310可以基于包括来自操作者的初始输入在内的各种不同的参数产生,并且该初始化310通常可以对应于用于操作的动力机械的启动,但是在其他时间来实施也是可能的。在一些情况下,初始化过程可以对应于用于输入装置的启动过程312,在该启动过程312期间,输入装置对于使用输入来控制动力机械的各个方面(例如,液压系统的操作)可能是不可用的。
62.方法300还可以包括在对初始化过程进行初始化期间将动力机械自动地置于320启动模式。在一些情况下,启动模式可以对应于对用于动力机械的功能的限制,包括甚至在用于输入装置的初始化过程完成之前对可用于操作(例如,利用相应的初始化子过程完成)的系统的功能的限制。例如,方法300可以包括在启动模式期间或在其他时间对动力机械的功能提供330受限的访问。在一些情况下,对功能的受限的访问可以对应于用于输入装置的启动过程312的持续时间,或者对应于其他时间限制或条件。
63.在某些情况下,可以根据启动模式的规定的许可332来确定对动力机械功能提供330的受限的访问。例如,可以限制对某些动力机械功能的访问,直到输入装置已经通过启动过程312充分前进以准备好接收来自用户的启用输入(例如,密码或其他授权输入)为止。在一些情况下,启动模式的许可332可以包括对动力机械的动力源的操作334的许可。因此,例如,操作者能够在用于输入装置的初始化过程期间启动动力机械的发动机,即使其他功能(例如,某些液压操作)可能无法立即可用。
64.在一些情况下,启动模式的许可332可以准许无动力机械功能338,包括动力源的操作。在一些情况下,启动模式的许可332可以准许受限的动力机械功能340。例如,在一些情况下,启动模式的许可332可以防止访问被排除的液压操作336,同时准许(或不准许)其他操作。作为另一示例,启动模式的许可332可以设定限制,在该限制内可以操作动力机械的一些机械功能,包括上面描述的那些机械功能。例如,可以根据一些许可332来强加对作业元件的行进或移动的速度或范围的限制。因此,也如上所述,可以防止操作者操作动力机械的某些液压(或其他)装置,或者可以约束操作者仅以某些方式来操作那些装置,直到输入装置已被充分初始化以接收授权输入(例如,密码),从而验证该操作者是否被授权使用这些装置。在一些情况下,启动模式的许可332可以准许动力机械的全功能342。在一些情况下,可以为特定的动力机械、操作者、位置或其他参数定制许可332。
65.在初始化过程完成之后,方法300可以包括基于由输入装置所接收的输入来允许访问350附加的动力机械功能。可以由操作者例如通过请求352密码或其他输入(例如,用于
语音识别的语音命令、面部扫描、视网膜扫描或指纹扫描等)来请求接收的输入。例如,方法300可以包括基于启动模式的许可332来限制动力机械的操作,直到用于输入装置的初始化过程已经完成并且操作者已经出示用于继续的适当的授权。在一些实施例中,如果没有出示适当的授权(例如,没有及时提供正确的密码),方法300可以包括维持根据启动模式的许可332的受约束的操作、或允许(或不允许)根据默认模式的操作(例如,仅对动力源操作、对某些液压功能无操作、对任何动力机械功能无操作,等)。
66.在一些实施例中,本公开的各方面,包括根据本公开的方法的计算机化的实施方式,可以被实施为一种使用标准编程或工程技术来生产软件、固件、硬件或其任意组合以控制处理器装置或计算机(例如,以能够操作的方式联接到存储器的处理器装置)以实施本文详述的方面的系统、方法、设备或制造物品。因此,例如,一些实施例可以被实施为有形地体现在非暂时性计算机可读介质上的一组指令,使得处理器装置可以基于从计算机可读介质读取指令来实施该指令。一些实施例可以包括(或利用)诸如自动化装置、专用或通用计算机之类的装置,包括各种不同的计算机硬件、软件、固件等,与下面的讨论一致。
67.本文所使用的术语“制造物品”旨在涵盖可以从任何计算机可读装置、载体(例如,非暂时性信号)或介质(例如,非暂时性介质)访问的计算机程序。例如,计算机可读介质可以包括但不限于磁存储装置(例如,硬盘、软盘、磁带等)、光盘(例如,压缩盘(cd)、数字多功能盘(dvd)等)、智能卡和闪存装置(例如卡、记忆棒等)。另外,应当理解,可以采用载波来承载计算机可读电子数据,诸如在发送和接收电子邮件或在访问诸如因特网或局域网(lan)之类的网络中所使用的计算机可读电子数据。本领域技术人员将认识到,在不脱离要求所要求保护的主题的范围或精神的情况下,可以对这些配置进行许多修改。
68.可以在附图中示意性地表示或在本文中以其他方式讨论根据一些实施例的方法的某些操作或执行这些方法的系统的某些操作。除非另有说明或限制,否则在附图中以特定空间顺序表示的特定操作可以不必以对应于该特定空间顺序的特定顺序来执行这些操作。相应地,附图中所示的或本文以其他方式公开的某些操作可以按照与明确图示或描述的顺序不同的顺序来被执行,视具体实施例而定。此外,在一些实施例中,某些操作可以并行地执行,包括通过专用的并行处理装置或被配置以用于作为大型系统的一部分进行相互操作的单独计算装置来并行地执行。
69.如本文在计算机实施方式的背景中所使用的,除非另有说明或限制,否则术语“部件”、“系统”、“模块”等旨在涵盖与计算机相关的系统的部分或全部,包括硬件、软件,硬件和软件的组合、或正在运行的软件。例如,部件可以是但不限于处理器装置、正在由处理器装置执行(或可由处理器装置执行)的过程、对象、可执行文件、执行线程、计算机程序或计算机。举例来说,在计算机上运行的应用程序和计算机两者都可以是部件。一个或多个部件(或系统、模块等)可以驻留在过程或执行线程内,可以位于一台计算机上,可以分布在两台或更多台计算机或其他处理器装置之间,或者可以被包含在另一部件(或系统、模块等)内。
70.尽管已经参考优选实施例描述了本发明,但是本领域技术人员将认识到,可以在不背离本讨论的范围的情况下在形式和细节上进行改变。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1