一种野外植物叶片分割用硬件系统及其分割方法
:
1.本发明涉及一种野外植物叶片分割用硬件系统及其分割方法。
背景技术:
:
2.树种识别的必要步骤是从叶片图像中分割出完整的目标树叶,为叶片区域特征提取及叶片分类识别打下基础,叶片分割结果的好坏直接影响识别的准确率;对于要分割的植物叶片,面临着叶片类内剧烈变化和复杂背景两方面的挑战;叶片类内主要影响有:由于光照变化的影响,目标叶片的颜色、亮度不均匀、目标叶片生长过程中遇到虫害或者发育不良而导致树叶残缺或者大小不均匀;复杂背景是指目标叶片周围除了叶片本身之外还有茎秆、果实、藤、树枝、树干等干扰物、目标叶片与周围背景过于相似,相邻叶子之间存在重叠粘连、目标叶片部分处于阴影区,部分处于光照区。
3.植物叶片图像分割通常用于确定图像中的叶片区域和边界,以减少背景区域的干扰,这是植物物种识别和植物病害检测与识别中的重要步骤;由于植物叶片有特定的整体形状,包括叶缘、叶形、叶脉,需要分割方法具有较强的细节保持能力,因此直接将一般目标分割方法应用到植物叶片图像上难以取得满意的效果,所以在一些复杂背景下的目标图像分割中常常采用随机游走算法进行运算和处理,易于求解、计算高效以及抗噪声能力强。
4.虽然随机游走算法和对应的硬件结构装置可以广泛应用在复杂背景下的目标图像分割,但是在精细结构目标分割问题中,由于树叶结构不适合粒子转移,粒子是在二维空间中随机转移,在每个位置都有向各个方向转移的可能,无法做到仅沿着目标的细长部分向一个方向连续转移,导致细长部分无法正确分割;并且在叶片结构上不连通目标都需要逐个提供交互才可以将图像分割出来;粒子在二维平面转移的过程十分复杂,所以通过模拟得到每个粒子的随机游走概率显然是不现实的,操作步骤繁琐、效率低下,从而造成得到的图像会存在精准度不高的问题。
技术实现要素:
:
5.本发明实施例提供了一种野外植物叶片分割用硬件系统及其分割方法,结构和方法设计合理,在控制器的集成控制作用下,配合外围硬件结构和电路器件,采用交互式的策略和对用户指定像素进行传播,通过带数据引导项的随机游走算法,从而实现植物叶片图像的分割,基于随机游走构成对像素的关系,建立一个超像素一致性约束模型,并结合人机交互技术,可以获取光滑的、精准度较高、鲁棒性强的叶片分割图像,操作步骤简便、提升了工作效率,解决了现有技术中存在的问题。
6.本发明为解决上述技术问题所采用的技术方案是:
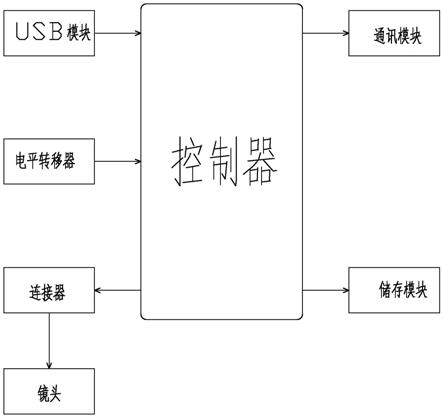
7.一种野外植物叶片分割用硬件系统,包括控制器,在控制器上连接有电平转移器和usb模块,所述电平转移器用于调节控制器内部的电压,使控制器内部输入与输出协调;所述usb模块用于连接外部设备以实现控制器功能的丰富;所述控制器通过连接器连接有镜头,所述镜头用于拍摄头像以将图像分割成不相交的子集;在控制器上还连接有存储模
块和通讯模块,所述存储模块用于存储函数和算法;所述通讯模块用于上传图像数据;所述控制器的型号为xy6771,在控制器上设有166个引脚,所述控制器通过二十九号引脚到三十八号引脚与连接器相连;所述控制器通过二十七号引脚、四十二号引脚、一百四十六号引脚和一百四十七号引脚与usb模块相连;所述控制器通过六十六号引脚和一百六十号引脚与电平转移器相连;所述控制器通过九十七号引脚、九十八号引脚和九十九号引脚与存储模块相连,所述控制器通过一百六十五号引脚与通讯模块相连。
8.在控制器上设有i2c接口、spi接口、dpi接口、ad转换接口和音频接口。
9.所述usb模块包括usb接口,在usb接口上设有24个引脚,所述usb接口的四号引脚、九号引脚、十六号引脚和二十一号引脚相短接与控制器的二十七号引脚相连;所述usb接口的五号引脚与控制器的四十二号引脚相连,所述usb接口的六号引脚和十九号引脚与控制器的一百四十七号引脚相连,所述usb接口的七号引脚和十八号引脚与控制器的一百四十六号引脚相连。
10.所述电平转移器的型号为sgm4553a,在电平转移器上设有8个引脚,所述电平转移器的四号引脚和八号引脚与控制器的一百六十号引脚相连,所述电平转移器的七号引脚与二号引脚与控制器的六十六号引脚相连。
11.所述连接器的型号为24
‑
5804
‑
030
‑
000
‑
829,在连接器上设有30个引脚,在连接器的四号引脚和五号引脚与镜头相连;所述连接器的九号引脚与控制器的五十七号引脚相连,所述连接器的十号引脚与控制器的五十六号引脚相连;所述连接器的十六号引脚与控制器的二十九号引脚相连,所述连接器的十七号引脚与控制器的三十号引脚相连,所述连接器的十九号引脚与控制器的三十二号引脚相连,所述连接器的二十号引脚与控制器的三十一号引脚,所述连接器的二十二号引脚与控制器的三十八号引脚相连,所述连接器的二十三号引脚与控制器的三十七号引脚相连,所述连接器的二十五号引脚与控制器的三十三号引脚相连,所述连接器的二十六号引脚与控制器的三十四号引脚相连,所述连接器的二十八号引脚与控制器的三十六号引脚相连,所述连接器的二十九号引脚与控制器的三十五号引脚相连。
12.所述储存模块为sim卡,在sim卡上设有8个引脚,所述sim卡的二号引脚与控制器的九十八号引脚相连,所述sim卡的三号引脚与控制器的九十九号引脚相连,所述sim卡的七号引脚与控制器的九十七号引脚相连。
13.所述通讯模块为wifi收发器,所述wifi收发器的型号为wan3216h2,所述控制器通过一百六十号引脚与wifi收发器相连,在wifi收发器和控制器之间设有相并联的第一电阻、第一电容和第二电容。
14.一种野外植物叶片分割方法,包括以下步骤:
15.s1、控制器基于偏差函数δ(x
i
)来定义图像中每个粒子的转移概率,以使图像边缘光滑;
16.s2、从存储模块中调用以值域为[0,1]的连续函数h(p
i
,ι,θ)和1
‑
h(p
i
,ι,θ)作为偏差函数δ(xi)权重的加权和形式;
[0017]
s3、控制器基于连续函数h(p
i
,ι,θ)来计算输出的像素属于目标的概率ψ(p
i
,ι,θ);
[0018]
s4、控制器通过存储模块定义相邻像素边的权重参数ω
ij
,以提高整个过程的转移概率;
[0019]
s5、控制器基于权重参数ω
ij
定义图像的拉普拉斯矩阵l,同时基于随机游走能量函数e
rw
(x)和偏差函数的正则项e
g
(x)获取能量函数e(x);
[0020]
s6、控制器通过连接器驱动镜头将图像г划分成两个不相交的子集г
l
和г
u
,以分别表示有标记像素集合和未标记像素集合,即г
l
=f∪b,г
u
=г\г
l
,其中f和b为种子点;相应的,将能量参数e(x)的参数写成分块的形式,并将能量函数e(x)转化成未知变量x
u
的函数e(x
u
);
[0021]
s7、控制器对函数e(x
u
)进行求导,令导数为0,得到线性方程组a
u
x
u
=λb
u
‑
c
t
x
l
;
[0022]
s8、证明线性方程组的参数矩阵a
u
是一个正定矩阵,使线性方程组得到唯一解x
u*
;
[0023]
s9、控制器对线性方程组的解x
u*
进行二值化处理,获取图像的分割结果,从而得到光滑的、鲁棒性强的植物叶片分割图像。
[0024]
所述偏差函数δ(x
i
)=s(p
i
,ι,θ)|x
i
‑
1|
γ
+(1
‑
s(p
i
,ι,θ))|x
i
‑
0|
γ
,其中,γ是一个正参数,s(p
i
,ι,θ)是一个二值函数,θ是参考模型,所述偏差函数δ(x
i
)的正则项e
g
(x)=∑
ni=1
δ(x
i
)。
[0025]
所述参考模型θ至少包括颜色直方图、高斯混合模型和深层卷积神经网络。
[0026]
本发明采用上述结构,通过控制器xy6771的集成控制作用将多种硬件电气元件进行连接和通讯;通过通讯模块的数据传输作用,将处理好的叶片图像传输到工作人员的上位设备,方便工作人员进行查找与观测;通过存储模块方便控制器调用所需要的函数、算法和参考模型等,以对叶片图像进行处理和运算;通过usb模块可以连接外部设备以丰富控制器的功能;通过控制器上的i2c接口、spi接口、dpi接口、ad转换接口和音频接口使控制器可以应用在不同的应用场景下;通过电平转移器来调节控制器内部的电压,使控制器内部输入与输出协调;通过控制器、连接器以驱动镜头动作对图像进行处理,具有实用简便、精准高效的优点。
附图说明:
[0027]
图1为本发明的控制原理图。
[0028]
图2为本发明的控制器的电气原理图
[0029]
图3为本发明的usb模块的电气原理图。
[0030]
图4为本发明的电平转移器的电气原理图。
[0031]
图5为本发明的连接器的电气原理图。
[0032]
图6为本发明的存储模块的电气原理图。
[0033]
图7为本发明的通讯模块的电气原理图。
[0034]
图8为本发明的流程示意图。
具体实施方式:
[0035]
为能清楚说明本方案的技术特点,下面通过具体实施方式,并结合其附图,对本发明进行详细阐述。
[0036]
如图1
‑
8中所示,一种野外植物叶片分割用硬件系统,包括控制器,在控制器上连接有电平转移器和usb模块,所述电平转移器用于调节控制器内部的电压,使控制器内部输入与输出协调;所述usb模块用于连接外部设备以实现控制器功能的丰富;所述控制器通过
连接器连接有镜头,所述镜头用于拍摄头像以将图像分割成不相交的子集;在控制器上还连接有存储模块和通讯模块,所述存储模块用于存储函数和算法;所述通讯模块用于上传图像数据;所述控制器的型号为xy6771,在控制器上设有166个引脚,所述控制器通过二十九号引脚到三十八号引脚与连接器相连;所述控制器通过二十七号引脚、四十二号引脚、一百四十六号引脚和一百四十七号引脚与usb模块相连;所述控制器通过六十六号引脚和一百六十号引脚与电平转移器相连;所述控制器通过九十七号引脚、九十八号引脚和九十九号引脚与存储模块相连,所述控制器通过一百六十五号引脚与通讯模块相连。
[0037]
在控制器上设有i2c接口、spi接口、dpi接口、ad转换接口和音频接口。
[0038]
所述usb模块包括usb接口,在usb接口上设有24个引脚,所述usb接口的四号引脚、九号引脚、十六号引脚和二十一号引脚相短接与控制器的二十七号引脚相连;所述usb接口的五号引脚与控制器的四十二号引脚相连,所述usb接口的六号引脚和十九号引脚与控制器的一百四十七号引脚相连,所述usb接口的七号引脚和十八号引脚与控制器的一百四十六号引脚相连。
[0039]
所述电平转移器的型号为sgm4553a,在电平转移器上设有8个引脚,所述电平转移器的四号引脚和八号引脚与控制器的一百六十号引脚相连,所述电平转移器的七号引脚与二号引脚与控制器的六十六号引脚相连。
[0040]
所述连接器的型号为24
‑
5804
‑
030
‑
000
‑
829,在连接器上设有30个引脚,在连接器的四号引脚和五号引脚与镜头相连;所述连接器的九号引脚与控制器的五十七号引脚相连,所述连接器的十号引脚与控制器的五十六号引脚相连;所述连接器的十六号引脚与控制器的二十九号引脚相连,所述连接器的十七号引脚与控制器的三十号引脚相连,所述连接器的十九号引脚与控制器的三十二号引脚相连,所述连接器的二十号引脚与控制器的三十一号引脚,所述连接器的二十二号引脚与控制器的三十八号引脚相连,所述连接器的二十三号引脚与控制器的三十七号引脚相连,所述连接器的二十五号引脚与控制器的三十三号引脚相连,所述连接器的二十六号引脚与控制器的三十四号引脚相连,所述连接器的二十八号引脚与控制器的三十六号引脚相连,所述连接器的二十九号引脚与控制器的三十五号引脚相连。
[0041]
所述储存模块为sim卡,在sim卡上设有8个引脚,所述sim卡的二号引脚与控制器的九十八号引脚相连,所述sim卡的三号引脚与控制器的九十九号引脚相连,所述sim卡的七号引脚与控制器的九十七号引脚相连。
[0042]
所述通讯模块为wifi收发器,所述wifi收发器的型号为wan3216h2,所述控制器通过一百六十号引脚与wifi收发器相连,在wifi收发器和控制器之间设有相并联的第一电阻、第一电容和第二电容。
[0043]
一种野外植物叶片分割方法,包括以下步骤:
[0044]
s1、控制器基于偏差函数δ(x
i
)来定义图像中每个粒子的转移概率,以使图像边缘光滑;
[0045]
s2、从存储模块中调用以值域为[0,1]的连续函数h(p
i
,ι,θ)和1
‑
h(p
i
,ι,θ)作为偏差函数δ(xi)权重的加权和形式;
[0046]
s3、控制器基于连续函数h(p
i
,ι,θ)来计算输出的像素属于目标的概率ψ(p
i
,ι,θ);
[0047]
s4、控制器通过存储模块定义相邻像素边的权重参数ω
ij
,以提高整个过程的转移
概率;
[0048]
s5、控制器基于权重参数ω
ij
定义图像的拉普拉斯矩阵l,同时基于随机游走能量函数e
rw
(x)和偏差函数的正则项e
g
(x)获取能量函数e(x);
[0049]
s6、控制器通过连接器驱动镜头将图像г划分成两个不相交的子集г
l
和г
u
,以分别表示有标记像素集合和未标记像素集合,即г
l
=f∪b,г
u
=г\г
l
,其中f和b为种子点;相应的,将能量参数e(x)的参数写成分块的形式,并将能量函数e(x)转化成未知变量x
u
的函数e(x
u
);
[0050]
s7、控制器对函数e(x
u
)进行求导,令导数为0,得到线性方程组a
u
x
u
=λb
u
‑
c
t
x
l
;
[0051]
s8、证明线性方程组的参数矩阵a
u
是一个正定矩阵,使线性方程组得到唯一解x
u*
;
[0052]
s9、控制器对线性方程组的解x
u*
进行二值化处理,获取图像的分割结果,从而得到光滑的、鲁棒性强的植物叶片分割图像。
[0053]
所述偏差函数δ(x
i
)=s(p
i
,ι,θ)|x
i
‑
1|
γ
+(1
‑
s(p
i
,ι,θ))|x
i
‑
0|
γ
,其中,γ是一个正参数,s(p
i
,ι,θ)是一个二值函数,θ是参考模型,所述偏差函数δ(x
i
)的正则项e
g
(x)=∑
ni=1
δ(x
i
)。
[0054]
所述参考模型θ至少包括颜色直方图、高斯混合模型和深层卷积神经网络。
[0055]
本发明实施例中的一种野外植物叶片分割用硬件系统及其分割方法的工作原理为:在控制器的集成控制作用下,配合外围硬件结构和电路器件,采用交互式的策略和对用户指定像素进行传播,通过带数据引导项的随机游走算法,从而实现植物叶片图像的分割,基于随机游走构成对像素的关系,建立一个超像素一致性约束模型,并结合人机交互技术,可以获取光滑的、精准度较高、鲁棒性强的叶片分割图像,操作步骤简便、提升了工作效率。
[0056]
在整体方案中,以单片机xy6771作为核心组件,在控制器上电气连接有usb模块、电平转移器、连接器、存储模块和通讯模块,从而构成了整体硬件电气结构;依靠整体硬件电气结构,通过数据传输和交互,从而得到工作人员所需要的叶片图像。
[0057]
优选的,电平转移器的型号为sgm4553a,在电平转移器上设有8个引脚,电平转移器的四号引脚和八号引脚与控制器的一百六十号引脚相连,电平转移器的七号引脚与二号引脚与控制器的六十六号引脚相连;实现系统内电压的调节和转换,以防止系统内部出现逻辑不协调或紊乱现象。
[0058]
优选的,连接器的型号为24
‑
5804
‑
030
‑
000
‑
829,在连接器上设有30个引脚,在连接器的四号引脚和五号引脚与镜头相连;连接器和控制器的连接关系为:连接器的九号引脚与控制器的五十七号引脚相连,连接器的十号引脚与控制器的五十六号引脚相连;连接器的十六号引脚与控制器的二十九号引脚相连,所述连接器的十七号引脚与控制器的三十号引脚相连,连接器的十九号引脚与控制器的三十二号引脚相连,连接器的二十号引脚与控制器的三十一号引脚,所述连接器的二十二号引脚与控制器的三十八号引脚相连,连接器的二十三号引脚与控制器的三十七号引脚相连,连接器的二十五号引脚与控制器的三十三号引脚相连,连接器的二十六号引脚与控制器的三十四号引脚相连,连接器的二十八号引脚与控制器的三十六号引脚相连,连接器的二十九号引脚与控制器的三十五号引脚相连。
[0059]
优选的,储存模块为sim卡,在sim卡上设有8个引脚,sim卡的二号引脚与控制器的九十八号引脚相连,sim卡的三号引脚与控制器的九十九号引脚相连,sim卡的七号引脚与
控制器的九十七号引脚相连;存储模块用来存储在运算处理过程中所需要的函数和算法,方便控制进行调用。
[0060]
优选的,通讯模块为wifi收发器,wifi收发器的型号为wan3216h2,控制器通过一百六十号引脚与wifi收发器相连,在wifi收发器和控制器之间设有相并联的第一电阻、第一电容和第二电容;以将处理好的图像数据上传到工作人员的上位设备。
[0061]
在控制器上还设有i2c接口、spi接口、dpi接口、ad转换接口和音频接口,以丰富控制器的附加功能,方便连接不同的接口设备提升控制器的性能。
[0062]
基于上述电气硬件连接关系,为植物叶片图像的分割和处理提供了基础,结合人机交互技术,可以快速简便获取光滑的、精准度较高、鲁棒性强的叶片分割图像。
[0063]
在整体方案中,主要分为以下步骤:控制器基于偏差函数来定义图像中每个粒子的转移概率,以使图像边缘光滑;从存储模块中调用以值域为[0,1]的连续函数作为偏差函数权重的加权和形式;控制器基于连续函数来计算输出的像素属于目标的概率;控制器通过存储模块定义相邻像素边的权重参数,以提高整个过程的转移概率;控制器基于权重参数定义图像的拉普拉斯矩阵,同时基于随机游走能量函数和偏差函数的正则项获取能量函数;控制器通过连接器驱动镜头将图像划分成两个不相交的子集,以分别表示有标记像素集合和未标记像素集合;相应的,将能量参数参数写成分块的形式,并将能量函数转化成未知变量x
u
的函数e(x
u
);控制器对函数e(x
u
)进行求导,令导数为0,得到线性方程组;控制器对线性方程组的解进行二值化处理,获取图像的分割结果。
[0064]
具体的,偏差函数δ(xi)=s(pi,ι,θ)|xi
‑
1|γ+(1
‑
s(pi,ι,θ))|xi
‑
0|γ,其中,γ是一个正参数,s(pi,ι,θ)是一个二值函数,θ是参考模型,所述偏差函数δ(xi)的正则项e
g
(x)=∑
ni=1
δ(x
i
)。
[0065]
对于参考模型θ,至少包括颜色直方图、高斯混合模型和深层卷积神经网络。
[0066]
定义随机游走能量函数e
rw
(x)=1/2x
t
lx,其中l是图像的拉普拉斯矩阵,从而得到能量函数e(x)=e
rw
(x)+λ/2e
g
(x),令γ的值设定为2,从而得到能量函数的最终形式e(x)=1/2xtax
‑
λxtb+const,其中,a=l+λi,b=h1
n
,const=λ/2*1
nt
h1
n
。
[0067]
将e(x)的参数写成分块的形式,将能量函数e(x)转换成未知变量x
u
的函数e(x
u
)=1/2x
ut
a
u
x
u
+x
ut
c
t
x
l
‑
λx
ut
b
u
+const;对函数e(x
u
)进行求导,令导数为0,得到线性方程组a
u
x
u
=λb
u
‑
c
t
x
l
。
[0068]
通过对线性方程组的解x
u*
进行二值化处理,获取图像的分割结果,从而获取光滑的、鲁棒性强的植物叶片分割图像。
[0069]
综上所述,本发明实施例中的一种野外植物叶片分割用硬件系统及其分割方法在控制器的集成控制作用下,配合外围硬件结构和电路器件,采用交互式的策略和对用户指定像素进行传播,通过带数据引导项的随机游走算法,从而实现植物叶片图像的分割,基于随机游走构成对像素的关系,建立一个超像素一致性约束模型,并结合人机交互技术,可以获取光滑的、精准度较高、鲁棒性强的叶片分割图像,操作步骤简便、提升了工作效率,能够适应于不同的应用场景。
[0070]
上述具体实施方式不能作为对本发明保护范围的限制,对于本技术领域的技术人员来说,对本发明实施方式所做出的任何替代改进或变换均落在本发明的保护范围内。
[0071]
本发明未详述之处,均为本技术领域技术人员的公知技术。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1