信息处理方法、信息处理装置、制造系统和物品制造方法与流程
1.本发明涉及一种信息处理装置。
背景技术:
2.迄今为止,利用序列程序来控制部署在生产线等中的设备。作为这种序列程序,已知例如梯形程序,并且这种序列程序由称为plc和定序器的控制器执行。在开发或解调此类序列程序时准备时间图,以验证所调度的设备的操作的操作定时和周期时间。
3.此类时间图采用通过在时基上以图形方式对准来指示设备的每个操作的模式,并且在相应操作之间就操作开始定时而言存在上下文或依赖性的情况下,通过以线或箭头连接来指示用来指示每个操作的图形。注意的是,以下在多个设备之间一个设备的操作定时依赖于另一个设备的操作定时来确定的依赖性将被称为从属关系。
4.在多个操作之间存在这种从属关系的情况下,在通过考虑多个设备的操作调整图形的位置的同时准备时间图。因此,其工作变得繁琐。于是,提出了一种易于准备和编辑这种时间图的方法。例如,日本专利申请公开no.2004
‑
227051在时基上部署指示操作的图形,然后当用户通过箭头将图形彼此连接时,在端点侧部署图形以使得在端点侧的图形的操作开始定时与在起点侧的图形的操作完成定时一致。
5.有时在参考时序图时执行诸如实施序列程序之类的工作。在这种情况下,期望能够在考虑和改变设备的操作规范的同时容易地准备和编辑这种时间图,以能够迅速推进这种工作。
6.在准备和编辑时间图时,有时通过gui在屏幕上使用诸如时间图编辑器之类的应用。在通过这样的应用手动编辑时间图的情况下,当具有从属关系的操作中的先前操作被编辑时,仍然需要手动编辑其后续操作的开始定时等。
7.日本专利申请公开no.2004
‑
227051被布置为当指示从属关系的箭头彼此连接时自动调整图形的位置。但是,日本专利申请公开no.2004
‑
227051没有考虑去编辑具有从属关系并且已被部署的图形的位置。因此,在编辑除具有由箭头指示的从属关系的图形以外的图形的情况下,例如,在时基上移动或扩展/收缩具有从属图形的主图形的情况下,有必要手动执行调整工作,诸如从属图形的移动。
8.至于时序图,期望能够通过例如不仅根据图形的从属关系而且根据所有操作规范的改变来自动执行时间图的准备和编辑工作的一部分来减轻用户的负担。
技术实现要素:
9.本发明的第一方面是一种信息处理方法,包括:响应于来自用户的输入,获取设备的操作的内容以及定义操作的时间从属关系的定义信息;以及基于该内容和定义信息来生成操作的时间图。
10.本发明的第二方面是一种信息处理装置,包括:获取部分,被配置为响应于来自用户的输入而获取设备的操作的内容以及定义操作的时间从属关系的定义信息;以及生成部
分,被配置为基于该内容和定义信息来生成操作的时间图。
11.本发明的第三方面是一种接口单元,被配置为设置用于生成与设备的操作相关的时间图的定义信息,其中响应于来自用户的通过接口单元的输入,设置作为定义信息的操作的时间从属关系和设备的操作的内容。
12.通过以下参考附图对示例性实施例的描述,本发明的其它特征将变得清楚。
附图说明
13.图1是例示根据本公开的示例性实施例的时间图生成装置的配置的框图。
14.图2例示了根据本公开的本示例性实施例的序列图样本。
15.图3例示了根据本公开的本示例性实施例的时间图样本。
16.图4是例示根据本公开的本示例性实施例的操作信息获取处理器的示例性处理的流程图。
17.图5是例示根据本公开的本示例性实施例的操作开始时间获取处理器的示例的流程图。
18.图6是例示根据本公开的本示例性实施例的操作步骤信息对准处理器的示例性处理的流程图。
19.图7是例示根据本公开的本示例性实施例的时间图信息生成处理器的示例的流程图。
20.图8是例示根据本公开的本示例性实施例的时间图的图。
21.图9是例示根据本公开的本示例性实施例的序列图的图。
22.图10是指示根据本公开的本示例性实施例的操作步骤信息的表。
23.图11是指示根据本公开的本示例性实施例的从属关系信息的表。
24.图12例示了根据本公开的本示例性实施例的指示相关操作的选择结果的表。
25.图13a是指示根据本公开的本示例性实施例的另一个相关操作的模式1的表。
26.图13b是指示根据本公开的本示例性实施例的另一个其它相关操作的模式2的表。
27.图14是指示根据本公开的本示例性实施例的其中添加了操作开始时间的操作步骤信息的表。
28.图15是指示根据本公开的本示例性实施例的其中存储了转变源信息的操作步骤信息的表。
29.图16是指示根据本公开的本示例性实施例的在编辑之后的时间图的图。
30.图17是例示序列程序(梯形程序)的处理系统中的工作流程的一个示例的图。
具体实施方式
31.将参考附图描述用于执行本公开的模式。注意的是,以下描述的配置始终是一个示例,并且详细配置例如可以由本领域技术人员在不脱离本公开的要旨的范围内适当地修改。更进一步,在本示例性实施例中采用的数值仅仅是参考数值的示例。
32.在本示例性实施例中,将例示被配置为生成并输出描述设备的操作的时间图的信息处理装置或特别的时间图生成装置100的配置和操作。注意的是,假设由时间图描述的设备的操作是由序列程序(例如,梯形程序)控制的。这个时间图被用于在例如如下所述的图
17中所示的开发处理系统中开发并验证序列程序(例如,梯形程序)。
33.根据本示例性实施例的信息处理方法,基于由用户准备并定义了设备的操作的时间上下文和从属关系的定义信息,自动生成并输出过去由专用编辑器手动输入或编辑的时间图。在这种情况下,基于定义信息中定义的时间上下文和从属关系来生成指示多个相互关联的设备的操作的时间图,并且例如输出或显示这个时间图的图形表示。
34.用户例如可以在例如gui(图形用户界面)上以稍后描述的图2中所示的序列图的格式来准备和编辑本示例性实施例的定义信息。在序列图上(即,在定义信息上)定义设备的操作的时间上下文和从属关系。因此,即使在校正多个相关设备的操作的一部分的情况下,也可以通过编辑序列图(即,定义信息)的相关部分来自动输出其中在图形表示中正确调整了时间上下文和从属关系的时间图。可以通过由用户通过用户界面执行的预定操作来执行时间图的输出。
35.图1是例示根据本示例性实施例的时间图生成装置100的配置的框图。时间图生成装置100包括cpu 110、数据存储部分120、程序存储部分130、显示处理器140、显示部分141和输入处理器150。
36.cpu 110是根据给定指令执行包括算术处理、数据准备处理、将处理写入/读出存储器的各种处理的计算机。
37.数据存储部分120设有用于存储序列图信息160、操作信息170和时间图信息180的存储区域。
38.使cpu 110执行相应处理的程序存储在程序存储部分130的操作信息获取处理器131、操作开始时间获取处理器132、操作步骤信息对准处理器133和时间图信息生成处理器134(即,生成部分或生成步骤)中。诸如eeprom和硬盘之类的存储介质被用作构成程序存储部分130的存储单元。也可以使用诸如可移动光盘和各种存储器设备之类的计算机可读存储介质的驱动器用于程序存储部分130。通过使用这样的计算机可读存储介质,可以在时间图生成装置100中安装和更新描述稍后描述的本示例性实施例的控制过程的控制程序。在这种情况下,计算机可读存储介质构成本公开的存储介质。
39.显示处理器140执行用于在构成用户接口的显示部分141(诸如lcd显示器)上显示信息的处理。输入处理器150执行从构成用户接口的输入单元(诸如键盘和鼠标)接收信息的处理。由cpu 110、显示部分141、显示处理器140、输入处理器150等构成的用户接口构成执行用于准备稍后描述的序列图的准备步骤的准备单元。接下来,将详细描述存储在数据存储部分120中的序列图信息160、操作信息170和时间图信息180。
40.图2例示了序列图信息160的序列图的样本200供参考。
41.图2中的序列图的样本200由操作名称设置部分210和序列设置部分220构成。序列设置部分220包括关于操作名称211的信息。操作名称211包括构成单元的相应设备的操作的标题信息。序列设置部分220包括关于操作步骤图形230和连接器图形240的信息。操作步骤图形230指示要被控制的单元的操作,并且包括关于转变目的地名称231和操作时间232的信息。转变目的地名称231包括指示构成该单元的每个设备在该设备已经被操作之后的状况的信息。操作时间232包括关于构成单元的每个设备在从操作的开始到结束所需的时间的信息。连接器图形240包括关于相应操作之间的从属关系的信息。
42.返回到图1,操作信息170包括操作步骤信息171和从属关系信息172。操作步骤信
息171包括操作名称信息、关于与操作状态的转变相关的移动源和移动目的地的名称的信息以及操作时间信息。
43.从属关系信息172包括起点侧的操作步骤信息和终点侧的操作步骤信息。
44.例如,与图2中的连接器图形240对应的从属关系信息包括指示操作名称a的转变目的地为a2的操作步骤信息和指示操作名称b的转变目的地为b2的操作步骤信息。现在将在下面详细描述时间图信息180。
45.图3例示了时间图信息180的时间图的样本300。图3中的时间图的样本300由设置部分310、时间指示部分320和图形绘制部分330构成。设置部分310包括关于操作名称311和操作状态312的信息。操作名称311包括构成单元的相应设备的操作的名称信息。操作状态312包括指示构成单元的相应设备的操作之前和之后的状态的信息。时间指示部分320包括时间信息321。图形绘制部分330包括关于指示设备处于操作中的斜线331、指示设备处于待机状况的水平线332和指示不同操作之间的从属关系的圆弧箭头333的信息。
46.图17是例示作为使用如上所述的时间图的环境的一个示例的序列程序(即,梯形程序)的开发和设计工作的工作流程的示意图。执行与生产单元的硬件相关的各种设计工作的机械设计者通过时间图准备工作1911来准备时间图1901。在本示例性实施例中,将描述用于通过利用序列图来生成和显示时间图1901的技术。
47.在时间图1901中描述了在生产步骤中相应生产设备的操作顺序和依赖性。在接收到完成的时间图1901之后,软件设计者开始设计工作。在此,软件设计者执行设计文档准备工作1912以准备由步进器构造表、io表、sw分配表、异常表、控制器控制模块管理表等构成的设计文档1902。
48.更进一步,软件设计者基于由步进器构造表、io表、sw分配表、异常表、控制器控制模块管理表等构成的设计文档1902并且基于时间图1901来准备或自动生成流程图1903。注意的是,在从时间图1901自动生成流程图1903的情况下,存在以差异添加的方式执行将来自设计文档1902的设计信息自动描述到流程图1903中的这种处理的情况。
49.然后,软件设计者确认所准备的流程图1903,并与分支条件、待机条件、被分支条件分支之后的处理内容等对应地校正流程图1903。
50.接下来,软件设计者通过参考设计文档1902通过专用的编辑器等来描述和编辑梯形程序1904(即,序列图)。可替代地,还存在响应于流程图1903和设计文档1902而自动生成梯形程序1904的情况。注意的是,还存在响应于梯形程序1904(即,序列图)的调试、准备和编辑而稍微校正梯形程序1904所基于的流程图1903和设计文档1902的情况,如图17中的向左箭头所指示的。最后,软件设计者执行梯形程序1904的确认工作1917并结束设计流程。
51.例如,这样准备的梯形程序1904(即,序列图)被传送到控制生产线中部署的一组设备的集成控制单元(诸如定序器(plc))。这个集成控制单元控制生产线(例如,物品的制造系统)中部署的多个生产设备,并且可以通过由那些生产设备输送、处理或组装工件来制造工业产品或其零件。在这种情况下,还可以进行布置,使得从由本示例性实施例的处理生成的时间图和流程图自动生成序列程序(即,梯形程序),并使得集成控制单元通过序列程序(即,梯形程序)来控制生产设备。
52.下面将详细描述图1中的程序存储部分130中包括的每个部分。图4是例示操作信息获取处理器131的示例性处理的流程图。
53.首先,在步骤s410中,cpu 110向数据存储部分120中存储的序列图信息160中包含的相应操作分配id。
54.在步骤s420中,cpu 110通过以id为单位从序列图信息160中提取操作名称、转变目的地名称和操作时间来获取操作步骤信息171。
55.在步骤s430中,cpu 110通过从序列图信息160中提取操作之间的从属关系来获取从属关系信息172。
56.在步骤s440中,cpu 110将这样获取的操作步骤信息171和从属关系信息172存储到数据存储部分120中。
57.图5是例示操作开始时间获取处理器132的示例性处理的流程图。在步骤s510中,cpu 110获取在数据存储部分120中存储的序列图信息160中包含的从属关系信息172。然后,cpu 110针对相关操作选择在先行执行的操作当中直接或级联链接的从属相关操作的id。
58.在步骤s520中,cpu 110获取所选择的相关操作中包含的操作的总操作时间(即,在步骤s521至s524中)。在存在多条相关操作路径的情况下(即,在步骤s521中为“是”),cpu 110在步骤s523中获取其中相关操作路径中包含的操作的操作时间的总值最大的相关操作路径。在不存在多条相关操作路径的情况下(即,在步骤s521中为“否”),cpu 110在步骤s524中获取操作时间的总值。
59.在步骤s530中,cpu 110将在步骤s520中获得的值存储到每个操作步骤信息171的操作开始时间。
60.图6是例示操作步骤信息对准处理器133的示例性处理的流程图。在步骤s610中,cpu 110针对每个操作名称重新布置操作步骤信息171,并且在相同的操作名称下按照较小的操作开始时间的次序进一步重新布置。
61.在步骤s620中,cpu 110针对每个操作步骤信息171获取具有相同操作名称的紧接在前的操作步骤信息171的转变源名称,并将其添加为转变源名称。注意的是,关于相应操作名称的最前操作步骤信息171的转变源名称,例如,cpu 110添加由相应操作名称的最后操作步骤信息171保持的转变目的地名称。
62.图7是例示时间图信息处理器134的控制过程的示例的流程图。在图7的步骤s710中,cpu 110获取数据存储部分120中存储的相应操作步骤信息171。
63.在步骤s720中,cpu 110获取数据存储部分120中存储的相应从属关系信息172。
64.在步骤s730中,cpu 110根据由此获取的相应操作步骤信息171和相应从属关系信息172生成时间图信息180,并且生成并显示显示信息,以便用户能够容易地观察。
65.一种通过将加工机器人例示为要被控制的对象来生成和编辑时间图的过程。
66.图8是例示根据本示例性实施例的待处理的对象的时间图的图。例如,时间图800是由cpu 110基于数据存储部分120中存储的时间图信息180所准备的。在图8中,相应元素通过使用与图3中所指示的相应元素相同的附图标记来指示,并且它们的功能与图3中所描述的相同。
67.图8中的时间图800在设置部分310中包括指示加工机器人的操作类型的操作名称311和指示加工机器人在每个连续操作之前和之后可以采取的操作状态的操作状态312。时间指示部分320被布置为具有由每0.1秒的时基网格构成的时间信息321,并且图形绘制部
分330包括其中以图形方式指示操作状态的转变的图形列。
68.在图8的操作名称311中指示了四种类型的操作,即,输送操作810、定位操作820、第一加工操作830和第二加工操作。
69.图8中的操作状态312指示加工机器人在每次操作之前和之后可以采取的操作状态(即,操作步骤)。即,对于输送操作810指示返回位置和馈送位置,对于定位操作820指示释放位置和调节位置,对于第一加工操作830指示待机、组装a和组装b,并且对于第二加工操作840指示待机和组装c。
70.图8中的图形绘制部分330通过线图指示其中在每次操作中状态随着时间的流逝而转变的状况,并且在其中用带圈数字的id指示状态转变的时段期间指示倾斜线的部分。注意的是,由于字符代码的限制,在下面的文本中,图8中带圈数字由带括号的数字表示。
71.例如,对于输送操作810,在加工机器人的输送机构可以取返回位置和馈送位置这两个状态的情况下,加工机器人在从时基的0秒开始的0.2秒期间从返回位置移动到馈送位置。例如,在带圈数字(1)的时段期间向右上方绘制的线图例如指示向馈送位置移动,并且这次的操作从开始到结束所需的操作时间为0.2秒。这个带圈数字(1)指示分配给作为从返回位置到馈送位置的移动操作的基础的操作步骤信息的id。更进一步,从0.2秒到1.7秒的输送操作的线图是水平的,指示输送机构停止在馈送位置处。然后,在从1.7秒到1.9秒的时段期间执行被分配带圈数字(2)的id的操作,即,从馈送位置到返回位置的移动。即,进行从馈送位置到返回位置的移动。在这个时段期间向右下方绘制的线图指示它是向返回位置的移动。线图在1.9秒及之后是水平的,指示输送机构停止在返回位置处。
72.更进一步,圆弧箭头从带圈数字(1)的操作的结束时间点延伸到定位操作,并且开始在定位操作中从释放状态转变到调节状态的带圈数字(3)的操作。这指示带圈数字(2)的操作在带圈数字(1)的操作完成之后开始的从属关系。
73.更进一步,带圈数字从第一加工操作的带圈数字(7)的操作的结束时间点以及第二加工操作的带圈数字(9)的操作的结束时间点起延伸,并且带圈数字(3)的操作开始。这指示带圈数字(4)的操作在带圈数字(7)和带圈数字(9)的操作完成之后开始,即,取决于带圈数字(7)和带圈数字(9)的操作的完成。
74.因此,本示例性实施例的时间图800指示一系列的操作序列,即,加工机器人输送工件、在工作台上定位、在执行两种类型的加工之后释放定位并将工件输送到返回位置。
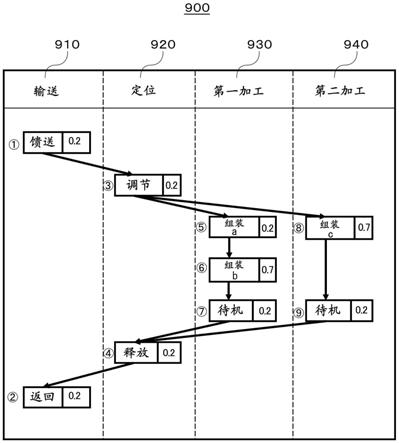
75.接下来,将参考图9描述成为用于生成图8中的时间图800的输入数据的序列图。
76.图9中的序列图900指示了数据存储部分120中存储的序列图信息160,并且是由用户准备的。序列图900在其上部包括指示了加工机器人的操作类型的操作名称设置列,并且在其下部包括指示了指示每个操作中的每个操作步骤的四边形的序列设置列以及指示了相应操作之间的从属关系的箭头。注意的是,在下文中,这些附图中的四边形将被称为“操作步骤图形”。
77.用户可以通过由输入处理器150、显示处理器140、显示部分141等组成的图形用户界面(gui)来输入和/或编辑具有这种图形显示的序列图900。
78.在图8中的操作名称列中与图8中的操作810至840对应的四种类型的操作(即,输送操作910、定位操作920、第一加工操作930和第二加工操作940)被指示在图9的操作名称列中。
79.图9中的序列设置列指示由四边形指示的操作,其中四边形包括在其左侧的各自指示操作之后的状态的名称以及指示每个操作名称(即,910、920、930和940)的操作时间的值。
80.例如,对于输送操作910,指示在0.2秒内移动到馈送位置的操作以及在0.2秒内移动到返回位置的操作。注意的是,带圈数字(1)指示被分配给向馈送位置的移动操作的id。
81.更进一步,箭头从输送操作的带圈数字(1)的操作步骤图形延伸到定位操作,并且连接到带圈数字(3)的转变到调节状态的操作。这指示带圈数字(3)的操作在带圈数字(1)的操作完成之后开始。
82.更进一步,箭头从第一加工操作的带圈数字(7)的操作步骤图形和第二加工操作的带圈数字(9)的操作步骤图形延伸,并且连接到带圈数字(4)的操作步骤图形。这指示带圈数字(4)的操作在带圈数字(7)的操作和带圈数字(9)的操作二者都完成之后开始。
83.如上所述,本示例性实施例的序列图900指示与时间图800相同的一系列的操作序列。
84.接下来,将参考图8和图9描述时间图生成操作的一个示例。
85.当开始生成时间图的指令被输入到输入部分中时,cpu 110首先根据图4中的流程图执行获取和存储各种信息的处理。
86.首先,在步骤s410中,当用户通过用户界面指示要生成序列图时,cpu 110在序列图准备步骤中获取已经由用户准备的序列图。然后,cpu 110将由上述带圈数字指示的id分配给由此获得的序列图900中描述的相应操作步骤图形。
87.在步骤s420中,cpu 110从序列图900获取操作步骤信息171。操作步骤信息171包括描述操作的各方面的定义信息,诸如以id为单位的操作名称和操作时间。图10具体地例示了在步骤s420的时间点的操作步骤信息171的一个示例。在图10的示例中,操作步骤信息包括由id 1001指示的每个相应操作的操作名称1002、操作状态的转变的转变目的地1003、操作时间1004。注意的是,例如,在图10上和图10之后,id列中指示的数字与由图8中带圈数字指示的id对应。
88.在步骤s430中,cpu 110从序列图900获取包括相应操作之间的从属关系的定义信息的从属关系信息172。图11具体地例示了从属关系信息172的一个示例。从属关系信息172包括相互从属的两个操作步骤信息171的id 1101和1102。
89.在步骤s440中,cpu 110将操作步骤信息171和从属关系信息172存储到数据存储部分120的操作信息170中。
90.接下来,cpu 110通过图5中的流程图的处理来获取相应操作的操作开始时间,并将它们添加到操作步骤信息中。
91.在步骤s510中,cpu 110通过从属关系操作提取步骤选择数据存储部分120中包括的操作信息170的从属关系信息172中所包括的相应操作的相关操作。在此,相关操作是指在目标操作之前执行的操作当中直接或级联链接的操作。在此,图12例示了通过从左侧表上的先前操作id 1201和后续操作id 1202的行中检索相关操作来提取并选择右侧表上所示的相关的先前操作id 1203和后续操作id 1204的状况。在此,如图12中的右侧表中所示,提取并选择与id 9的操作相关的一系列相关操作。
92.图13a和图13b例示了选择其它相关操作时的状况。图13a和13b中的状况与图12中
的状况相同。图13a在左侧表中例示了原始的先前操作id 1301和后续操作id 1302的行,并且在右侧表中例示了选择之后的先前操作id 1303和后续操作id 1304的行。图13b还在左侧表中例示了原始的先前操作id 1305和后续操作id 1306的行,并且在右侧表中例示了选择之后的先前操作id 1307和后续操作id1308的行。
93.图13a和图13b具体地例示了选择相关操作作为其结果的状况。在这个示例中,存在id 4从属的先前操作的两行路径。即,id 4从属的先前操作的路径中的第一条路径是图13a中所指示的id 7、id6、id 5、id 3和id 1的模式1。id 4从属的先前操作的第二条路径是图13b中所指示的id 9、id 8、id 3和id 1的模式2。
94.在步骤s520中,cpu 110在步骤s522、步骤s523或步骤s534中获取所选择的相关操作中包含的操作的总操作时间。在存在多个相关操作的情况下(即,在步骤s521中为“是”),cpu 110在步骤s523中获取操作时间的总值最大的相关操作中包含的操作。
95.在步骤s530中,cpu 110将在步骤s520中获取的值存储到相应的操作步骤信息171的操作开始时间。图14是具体地指示操作步骤信息171的一个示例的表,其中操作步骤信息171被按照由id1401指示的每个操作添加了操作名称1402、操作状态的转变的转变目的地1403、操作时间1404和操作开始时间1404。通过使用这样获取的开始和结束时间,可以决定时间图的图形形状。
96.接下来,cpu 110在步骤s610中按照操作名称重新布置操作步骤信息171、对准并在步骤s620中获取信息a。在图6中的步骤s610中,cpu 110按照操作名称重新布置相应的操作步骤信息171,并且在相同的操作名称下按照较小的操作开始时间的次序进一步重新布置。
97.在图6的步骤s620中,cpu 110针对每个操作步骤信息171获取紧接在前的操作步骤信息171的转变源名称,并将其存储到转变源名称中。更进一步,关于相应的操作名称的最前操作步骤信息171的转变源名称,cpu 110获取并添加相应的操作名称的最后操作步骤信息171的转变目的地名称。图15中的操作步骤信息包括按照由id1001指示的每个操作的操作名称1502、操作状态的转变源1503、操作状态的转变目的地1504、开始时间1505和操作时间1506。
98.接下来,cpu 110通过图7中的处理来指示时间图。首先,在图7的步骤s710中,cpu 110从数据存储部分120获取操作步骤信息171和从属关系信息172。
99.接下来,在图7的步骤s720中,cpu 110根据操作步骤信息171和从属关系信息172准备并指示时间图800的生成信息。在此,cpu 110根据操作步骤信息171中的操作名称和转变目的地名称来生成用于指示时间图800中的操作名称列、操作状态列和图形列中的线图的信息。更进一步,cpu 110根据从属关系信息172生成用于指示圆弧箭头的信息。
100.根据本示例性实施例,通过例如经由上述处理准备如图9中所示的序列图,可以基于序列图容易地生成图8中的时间图。
101.因为序列图定义了操作状态的转变和从属关系,所以如果要进行待控制的设备的操作规范的改变,那么可以通过例如编辑序列图容易地并自动地生成与改变之后的操作对应的时间图。例如,可以如下执行随着待控制的单元的操作规范的改变而校正时间图的处理。
102.例如,图8的时间图800中的id 6的操作的操作时间被从0.7秒改为0.4秒。在直接
校正时间图的情况下,指示id 6的操作的斜线的右端收缩到1.0秒的位置。然后,随之而来的,变得有必要还校正后续的从属操作。
103.图16是例示在校正id 6的操作的情况下校正之后的时间图1000的图。图16的图形格式与上述图3和图8的图形格式相同,并且相同的附图标记被用于相同或对应的部分。在图16中的经校正的时间图1000中,经校正的操作由点线指示。在这种情况下,id 6的操作时间被改变,并且id 7的开始时间被提前了0.3秒。然后,因为id 4的操作开始时间取决于包括id 9的操作在内的相关操作,所以id 4的操作和从属于其的id 2的操作的开始时间也被改变。因此,当部分地改变操作时间时,变得有必要根据该校正来校正多个操作开始时间,并且如果要手动执行这样的操作,那么其工作变得极其麻烦。
104.但是,根据本示例性实施例,仅通过校正序列图900就可以容易地生成如图16中所示的经校正的时间图1000。例如,序列图900的id 6的操作时间被从0.7秒改变为0.4秒。接下来,用户通过执行如图4至图7中所示的处理来指示生成时间图并显示经校正的时间图1000。此时,仅通过改变序列图900的id 6的操作时间就完成了用户的工作,并且自动生成并输出如图16中所示的经校正的时间图1000。
105.即,根据本示例性实施例,cpu仅通过经由序列图改变操作规范就再次执行相应处理、获取所有操作的信息并且可以自动地重新生成与序列图的状态对应的时间图。因为仅通过校正要改变的部分就完成了用户的工作,所以不必直接且手动编辑时间图,并且可以显著地提高用于准备和编辑时间图的工作效率。
106.本公开的本示例性实施例不限于上述示例,并且可以适当地修改、省略或组装。例如,在显示部分中指示的诸如序列图和时间图之类的信息不限于上述格式。显示结果不仅可以被显示,而且可以被打印以提供给用户。更进一步,要控制的单元不限于加工机器人,并且本公开的生成方法广泛地适用,只要该单元是通过使用序列程序来控制的即可。本公开可以优选地用于设有电磁阀和气缸的各种设备的控制以及用于组装机器人的操作分析。更进一步,本公开适用于可以基于控制单元中设置的存储设备的信息而自动进行伸缩运动、弯曲运动和拉伸运动、垂直运动、水平运动或旋转运动或其复杂运动的机器。
107.其它实施例
108.本发明的(一个或多个)实施例还可以通过读出并执行记录在存储介质(也可以被更完整地称为“非暂态计算机可读存储介质”)上的计算机可执行指令(例如,一个或多个程序)以执行上述(一个或多个)实施例中的一个或多个实施例的功能和/或包括用于执行上述(一个或多个)实施例中的一个或多个实施例的功能的一个或多个电路(例如,专用集成电路(asic))的系统或装置的计算机来实现,以及通过由系统或装置的计算机通过例如从存储介质读出并执行计算机可执行指令以执行上述(一个或多个)实施例中的一个或多个实施例的功能和/或控制一个或多个电路执行上述(一个或多个)实施例中的一个或多个实施例的功能而执行的方法来实现。计算机可以包括一个或多个处理器(例如,中央处理单元(cpu)、微处理单元(mpu)),并且可以包括单独计算机或单独处理器的网络,以读出并执行计算机可执行指令。计算机可执行指令可以例如从网络或存储介质提供给计算机。存储介质可以包括例如硬盘、随机存取存储器(ram)、只读存储器(rom)、分布式计算系统的存储装置、光盘(诸如紧凑盘(cd)、数字多功能盘(dvd)或蓝光盘(bd)
tm
)、闪存设备、存储卡等中的一个或多个。
109.本发明的实施例还可以通过如下的方法来实现,即,通过网络或者各种存储介质将执行上述实施例的功能的软件(程序)提供给系统或装置,该系统或装置的计算机或是中央处理单元(cpu)、微处理单元(mpu)读出并执行程序的方法。
110.虽然已经参考示例性实施例描述了本发明,但是应该理解的是,本发明不限于所公开的示例性实施例。所附权利要求的范围应被赋予最广泛的解释,以便涵盖所有这种修改以及等同的结构和功能。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1