一种基于高空间分辨率遥感影像的林分树冠中心监测方法
一种基于高空间分辨率遥感影像的林分树冠中心监测方法
【技术领域】
1.本发明属于森林资源遥感监测方法领域,具体是一种基于高空间分辨率遥感影像的林分树冠中心监测方法。本发明是利用树冠中心位于树冠的最高点,其受到光照强度比树冠边缘受到的光照强度大,导致影像中灰度值最大点位于树冠中心位置,因此基于确定树冠内最大灰度值的位置,即可确定树冠中心的依据,建立一种通过寻找局部最大灰度值来确定树冠中心的方法,主要解决了由于林分密度大、树冠差异大、树冠重叠等问题造成树冠中心监测精度低的问题。
背景技术:
2.树木密度及其位置是评价生态系统资源、生物多样性、结构和生物地球化学过程的重要信息。在山地环境下,通过野外调查获取单株树木的信息是一项非常费时费力的工作。高空间分辨率遥感技术是自动监测单株树冠的一种可行方法。与实地调查相比,可以节省时间、人力和成本。高空间分辨率影像,具有成本低、空间尺度大、易于获取等优点,是准确监测树木树冠信息的首选影像。然而,对于复杂的树木树冠情况,如非常密集的植被、树冠大小差异大、重叠的树冠以及树冠和地面物体之间的混淆,精确的单株树冠监测仍然极具挑战。因此,需要针对区分重叠的树冠以及树冠与地面物体,提出一些更有效地提取树冠中心方法。
3.在高空间分辨率图像中,树冠灰度值具有一定的分布规律。树冠中心的灰度值最亮,离中心越远灰度值越小。根据这个假设,开发了通过识别局部最大值来监测树冠中心的方法,包括阈值分割、模板匹配、多尺度分割和局部最大值滤波。局部最大值滤波是经典方法之一,它将特定窗口内监测到最亮灰度值作为树冠中心。选择最佳窗口大小是一项关键工作,当窗口太小时,单个树冠被分成几个部分;如果窗口太大,则窗口内包含多个树冠。这两种情况都将导致树冠监测误差。因此,需要提出一些方法解决上述问题,使得窗口内出现多个树冠时能将其区分为多个树冠以及一个树冠被划分为多个树冠时能够将其合并为一个树冠,从而提高树冠监测精度。
技术实现要素:
4.鉴于树冠信息监测研究的重要性。本发明提出一种改进的局部最大值滤波算法来监测树冠中心。改进的局部最大值滤波与原始局部最大值滤波的主要区别在于:(1)局部最大值的提取方法不同,本发明采用影像x和y方向搜索法,而原始局部最大值滤波采用移动窗口搜索法;(2)本发明添加了合并和分割树冠中心的策略。
5.解决上述技术问题的技术方案是按如下步骤进行:
6.(1)根据高空间分辨率遥感影像,找出影像中y方向上灰度值局部最大值:
7.根据高分辨率遥感影像,在x方向上一定间隔处提取y方向的灰度值曲线并对曲线进行平滑,然后采用局部最大值搜索法寻找图像y方向上的平滑后灰度值曲线的所有局部最大值并记录其x和y坐标。
8.(2)根据步骤(1)的数据,找出树冠中心位置的初始种子点:
9.a、根据y方向上提取的第一个局部最大值坐标(x1,y1),提取其在x1方向上的灰度值曲线并做平滑处理;
10.b、采用局部最大值搜索法寻找步骤a平滑后灰度值曲线上所有局部最大值并记录其坐标;
11.c、寻找步骤b得到的所有局部最大值中与(x1,y1)距离最近点,并将该点定义为树冠中心初始种子点;
12.d、重复步骤a~c,依次找出步骤(1)中所有局部最大值对应的树冠中心初始种子点。
13.(3)根据步骤(2)的树冠中心初始种子点,计算每个初始种子点对应树冠的冠幅;
14.a、以树冠中心初始种子点(xs,ys)为中心,在x和y方向上分别搜索种子点左右两侧与其距离最近的灰度值局部最小值(即树冠边缘)并记录坐标(xs,yl)和(xs,yr)以及(xu,ys)和(xd,ys);
15.b、计算步骤a初始种子点(xs,ys)对应树冠的冠幅(yr-yl+xd-xu)/2;
16.c、重复步骤a~b,得到每个树冠中心初始种子点对应树冠的冠幅;
17.(4)在步骤(3)的基础上,确定每个树冠初始种子点对应的潜在树冠中心点;
18.a、以初始种子点为中心,以其对应的冠幅为窗口,计算窗口内灰度值的85%百分位值,查找窗口内大于85%百分位值的所有像元点,作为潜在树冠中心点集群并计算集群x和y坐标均值和标准差;
19.b、采用以下方案,确定是否对集群进行分裂并确定潜在树冠中心点位置;
20.当集群x和y坐标的标准差小于阈值时,则取集群坐标平均值作为潜在树冠中心位置;否则,将集群分成两个子集群,分别计算这两个子集群的x和y坐标的平均值,得到两个潜在树冠中心点位置。
21.c、重复步骤a~b,找出所有树冠中心初始种子点对应潜在树冠中心点位置;
22.(5)在步骤(4)的基础上,找出潜在树冠中心点之间距离小于阈值的点并将其合并,计算这些点的x和y坐标平均值作为最终的树冠中心点。
23.本发明具有下列有益效果:本发明通过合并策略来降低大树冠内多个中心的问题以及采用分裂策略来区分重叠的树冠,在降低错分和漏分误差方面具有优势。
【附图说明】
24.图1为本发明的流程图。
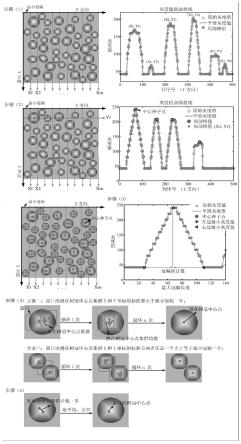
25.图2为利用本发明方法得到的模拟影像树冠中心点分布图。
26.图3为利用本发明方法得到的无人机影像树冠中心点分布图。
【具体实施方式】
27.下面结合实施例并参照附图对本发明作进一步详述:
28.需要说明的是,本发明以计算机模拟生成的42个树冠分布图为例,这42个树冠的冠幅在52~78之间。本发明的流程如图1所示。具体步骤如下:
29.(1)按一定间隔找出高空间分辨率遥感影像y方向上的灰度值局部最大值。
30.根据高空间分辨率遥感影像,找出影像中y方向上灰度值局部最大值:在图像x方向以最小冠幅(52)为间隔,提取图像y方向像元灰度值剖面曲线,对每条y方向灰度值曲线进行平滑处理,然后提取平滑后曲线的局部峰值,两个峰值之间最小距离应不小于最小冠幅值一半(26),依次记录每条曲线上所有局部峰值对应的y坐标,则任意一个局部峰值的坐标定义为(xi,yj);
31.(2)确定树冠中心位置的初始种子点。
32.根据步骤(1)的数据,找出树冠中心位置的初始种子点:从第一个峰值(x1,y1)开始,在x方向提取其灰度值剖面曲线,对曲线进行平滑处理,然后提取平滑后曲线的局部峰值,两个峰值之间最小距离应不小于最小冠幅值一半(26),依次记录该曲线上所有峰值对应的列号(xk),得到曲线上所有局部峰值(xk,y1),保留与(x1,y1)距离最近且距离小于最大冠幅(78)的局部峰值。由于此时得到的局部峰值并不是树冠内灰度值最大的像元,因此将这些局部峰值称为树冠中心初始种子点。重复上述步骤,依次找出步骤(1)中所有局部最大值对应的树冠中心初始种子点;
33.(3)计算每个初始种子点对应树冠的冠幅。
34.根据步骤(2)的树冠中心初始种子点,以最大冠幅(78)为窗口,选取x方向的平滑后的灰度值,分别搜索种子点左和右两边离种子点最近的最小灰度值并记录其坐标,然后通过右边x坐标减去左边x坐标即为该树冠在x方向上的冠幅估计值(clx)。重复以上步骤,计算树冠在y方向上的冠幅估计值(cly)。通过公式(1)计算出该树冠的冠幅估计值。最后,得到每个树冠中心初始种子点对应树冠的冠幅估计值;
[0035][0036]
(4)确定每个树冠初始种子点对应的潜在树冠中心点。
[0037]
在步骤(3)的基础上,分别以每个树冠初始种子点为中心,以其冠幅估计值为窗口,计算窗口内灰度值的85%百分位值,查找窗口内大于85%百分位值的所有像元点,得到窗口内潜在树冠中心点集群,然后计算窗口内潜在树冠中心点集群x和y坐标均值和标准差,采用以下两种方案确定每个树冠初始种子点对应的潜在树冠中心点。循环上述步骤,直到树冠中心点位置不发生变化或循环次数达到阈值30次。
[0038]
方案一:当窗口内潜在树冠中心点集群x和y坐标的标准差两者都小于最小冠幅一半(26)时,则直接取集群坐标平均值作为潜在树冠中心点;
[0039]
方案二:当窗口内潜在树冠中心点集群x和y坐标的标准差两者任意一个大于等于最小冠幅一半(26)时,则将窗口内潜在树冠中心点集群分成两个子集群,分别计算这两个子集群的x和y坐标的平均值作为两个潜在树冠中心点。潜在树冠中心点集群分裂规则如下:根据原始集群的x和y坐标的平均值和标准差,分别采用公式(2)和(3)计算出两个集群的中心(xm1,ym1)和(xm2,ym2),然后依据集群内像元点到两个子集群中心距离最短原则,将原始集群划分为两个子集群;
[0040]
[0041][0042]
(5)合并潜在树冠中心,确定最终树冠中心点。
[0043]
为了解决一个树冠中有多个中心点的问题,在步骤(4)的基础上,找出潜在树冠中心点之间距离小于其对应冠幅估计值一半的点,然后将这些点合并,并计算这些点的x和y坐标平均值作为最终的树冠中心点位置。
[0044]
参照图2和图3,通过本发明的方法得到模拟影像中各树冠中心点分布图发现,所有树冠的中心点都被准确的识别出来,精度达到100%。将本发明的方法应用到无人机高分辨率影像中得到,影像中共有238个树冠,本发明方法监测到247个树冠,其中正确的个数为219个,正确率为92.0%;漏掉19个,漏分误差为8.0%,错误28个,错分误差为11.8%。因此,基于本发明方法在监测树冠中心位置和个数上具有较高精度,是一种可行的方法。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1