一种道路井框差测量方法
1.本发明涉及道路性能检测技术领域,尤其是涉及一种道路井框差测量方法。
背景技术:
2.市政道路工程路面的平整度与各类沿街管道检查井框差的高程密切相关,井框差是指道路路面上窨井盖的井框与路表面的相对高度差。路面上的不平整,直接影响着道路的使用功能,一方面会影响民众出行的舒适性,另一方面严重时更会影响到行车安全性。道路上这一顽疾长期存在,成了城市路面工程的一项质量通病。所以在道路工程质量检查中,将“井框与路面高差”(简称:井框差)列为一项必检的项目。
3.众所周知,当检查井与路面衔接不平顺,会造成跳车现象,常常影响车速,同时加大车辆对周围路面的冲击,致使检查井周围路面过早出现破损或坑槽,再是检查井高突或低洼形成路面的障碍,在行车中常会出现因躲闪检查井位引发交通事故的情况。形成井框差超过允许偏差的病害状况表现于沥青路面上,究其原因,不外乎有几个方面:
4.(1)检查井周围回填不实,路面各结构层密度不够,造成井周边路面下沉。
5.(2)施工中升高检查井时,检查井框未与路面高程和路面横纵坡相吻合。
6.(3)检查井框缺乏足够的水泥砂浆和水泥混凝土固结牢靠,经过车辆创压后活动,致使井周围路面结构破碎发生并继续发展。
7.(4)因检查井基础及砌筑质量有缺陷,路面经长期使用后,检查井周边会产生不同程度的沉降。
8.目前,市政道路路面养护部门主要采用人工巡查的方式排查井框差问题。检查专员定期驾驶车辆通过管辖区内的道路,并观察道路上井框差状况,记录程度严重的井盖区域对应的街道位置,并拍照上报公路管理部门,完成路面养护。然而,这种基于人工巡查的排查方式,不仅耗时耗力,而且由于动态检测,可视力度低,场景干扰严重,造成筛查效率低、覆盖率不足、时间周期长;同时,这种定期局部路段巡检方式不仅全局监控力度差,而且路面状况巡查结果是人工记录,后续进行结构化数据打包还需要时间,因而上传实时性不高,影响交通管理部门养护强度。
技术实现要素:
9.本发明的目的就是为了克服上述现有技术存在的缺陷而提供一种道路井框差测量方法。
10.本发明的目的可以通过以下技术方案来实现:
11.一种道路井框差测量方法,井框差是指道路路面上窨井盖的井框与路表面的相对高度差,本发明中的井盖即指窨井盖,本发明包括以下步骤:
12.根据车辆采集的图像数据、振动数据获取有效井盖数据及有效井盖对应的振动数据;
13.计算有效井盖的振动数据z轴分量的rms指标,并进行速度修正,获取当量rms值。
14.优选地,所述计算振动数据z轴分量的rms指标的步骤包括:
15.提取振动数据中有效井盖对应的采集时间段内的t秒振动数据,计算每秒振动数据的z轴分量的均方根值并取最大值作为rms指标:
16.rms_max=max(z1,z1,
…
,z
t
‑1,z
t
)
17.其中,rms_max为rms指标,z
t
为时间t的z轴分量的均方根值。
18.优选地,所述的z
t
的计算公式为:
[0019][0020]
其中,z
tn
为时间t的第n个z轴分量,n为每秒的分量个数。
[0021]
优选地,所述对rms指标进行速度修正的步骤包括:
[0022]
将所有车速条件下计算的rms指标换算为等效速度下的当量rms值,计算公式为如下
[0023][0024]
其中,rms_max
revised
为当量rms值,rms
max
为rms指标,v
e
为等效速度,v为rms指标对应的当前速度。
[0025]
优选地,所述获取有效井盖数据及其对应的振动数据的具体步骤包括:
[0026]
获取车辆采集的图像数据、振动数据;
[0027]
将图像数据转换为俯视视角,识别图像数据中的井盖,并获取井盖的尺寸和位置;
[0028]
进行井盖的有效性判断,将有效井盖对应的图像采集时间戳与振动数据匹配,获取有效井盖的振动数据。
[0029]
优选地,所述将图像数据转换为俯视视角的具体步骤包括:
[0030]
所述的车辆采集的图像数据为倾斜视角,利用图像校正算法对图像数据进行处理,通过一个透视变换矩将原图投影到一个新的视平面,给定同一辆车同一相机架设角度唯一的透视变换矩阵,对图像上像素点坐标完成透视变换,输出俯视视角的图像数据。
[0031]
优选地,所述识别图像数据中的井盖的具体步骤包括:
[0032]
采用计算机视觉算法识别图像数据中的井盖,将俯视视角的图像数据输入计算机视觉算法,检测有井盖的图像,并在有井盖的图像上框选出井盖的外接矩形,输出外接矩形的长a和宽b作为井盖的尺寸,输出外接矩形中心距离图像左右车道线的两个像素距离d1,d2作为相对位置信息。
[0033]
优选地,所述对井盖进行有效性判断时,建立虚拟轮迹带,位置与虚拟轮迹带相交的井盖为有效井盖。
[0034]
优选地,所述的虚拟轮迹带为:
[0035]
俯视视角的图像数据中左右车道线间像素距离为l,取距离左车道线l/3像素距离、右车道线l/3像素距离内区域作为虚拟轮迹带,
[0036]
有效井盖的判断标准为:
[0037]
井盖位置满足d1<l/3+a/2或d2<l/3+a/2的井盖为有效井盖,其中,d1为井盖外接矩形距离左车道线的像素距离,d2为井盖外接矩形距离右车道线的像素距离。
[0038]
优选地,所述的测量方法还包括以下步骤:
[0039]
进行井框差程度分级,根据样本井框差程度与振动数据rms指标的拟合关系,给定速度修正后的rms指标,输出井框差程度分级。
[0040]
与现有技术相比,本发明具有如下优点:
[0041]
1、本发明对采集到的井盖图像、振动数据进行处理,能够有效利用rms指标对井框差的高度进行表示,来直观反映车辆经过井盖区域的振动情况,侧面反映井框差的程度等级,大幅提高对路面井框差的获取效率,能够可快速部署、应用于国内市政道路巡查业务中,实现高效稳定的井盖检测,降低井框差巡检、测量的人工成本。
[0042]
2、本发明采用图像处理、计算机方法对工业相机采集得到的前视、后视图像数据进行分析,提升了图像处理的效率,大大降低了人工作业,可快速识别图像中的井盖,并输出井盖的尺寸和相对位置信息,再进一步结合振动数据对井框差进行获取,提高井框差的检测效率和准确性;
[0043]
3.本发明通过数据融合的方法,充分利用图像数据和振动数据,为井框差测量和程度分级提供全方位、多角度的数据支撑,便于任一时间的复查和持续跟踪,在满足精度的同时,提升井框差测量的时效性和可靠性。
[0044]
4.本发明利用三轴加速度传感器采集得到的振动数据,来直观反映车辆经过井盖区域的振动情况,侧面反映井框差的程度等级,避免了巡查专员人工判别的误差,更具有说服力和实际价值。
附图说明
[0045]
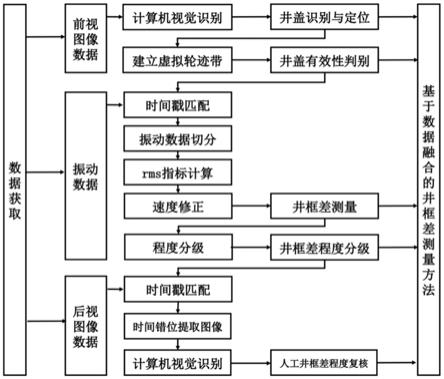
图1为本发明的流程示意图;
[0046]
图2为本发明数据获取设备布设示意图;
[0047]
图3为本发明图像校正算法示意图;
[0048]
图4为本发明计算机视觉算法识别示意图;
[0049]
图5为本发明虚拟轮迹带判别示意图。
具体实施方式
[0050]
下面结合附图和具体实施例对本发明进行详细说明。注意,以下的实施方式的说明只是实质上的例示,本发明并不意在对其适用物或其用途进行限定,且本发明并不限定于以下的实施方式。
[0051]
实施例
[0052]
一种道路井框差测量方法,井框差是指道路路面上窨井盖的井框与路表面的相对高度差,本发明中的井盖即指窨井盖,如图1所示,具体包括以下步骤:
[0053]
s1:进行数据获取。
[0054]
如图2所示,本发明利用可部署在任一车辆上的轻量化采集设备进行数据获取,包括用于采集前视图像数据、后视图像数据的车载工业相机,用于采集振动数据的三轴加速度传感器,以及必要的固定组件,采集时保证同一时刻采集到的数据具有同样的时间戳标签。
[0055]
本实施例中,采用前视图像数据进行井框差的识别和获取。
[0056]
步骤s2:进行井盖识别与定位,将图像数据转换为俯视视角,识别图像数据中的井盖,并获取井盖的尺寸和位置。
[0057]
车辆采集的图像数据为倾斜视角,利用图像校正算法对图像数据进行处理,通过一个变换矩阵将原图投影到一个新的视平面,给定同一辆车同一相机架设角度唯一的透视变换矩阵,对图像上像素点坐标完成透视变换,输出俯视视角的图像数据。如图3所示,左侧为原始前视图像,右侧为利用图像校正算法校正后的俯视视角的前视图像。
[0058]
由于车辆上的采集设备倾斜架设,其获取的图像数据为倾斜视角,利用图像校正算法对图像数据进行处理透视变换,通过一个3
×
3的变换矩阵将原图投影到一个新的视平面,消除因为相机倾斜假设而导致的远近或倾斜透视失真,同一辆车同一相机架设角度具有唯一的转换矩阵,给定该透视变换矩阵,即可对图像上像素点坐标完成透视变换,输出成俯视视角,具体转换公式如下:
[0059][0060]
其中,u,v是原始图像像素坐标,w为齐次坐标,w
′
为变换后的齐次坐标,x
′
,y
′
为变换后的图像物理坐标,a
ij
为变换系数,x,y为最终获取的图像物理坐标,具有关系为x=x
′
/w
′
,y=y
′
/w
′
,a
ij
为变换系数,齐次坐标。
[0061]
将图像数据转换为俯视视角后,可进行图像内井盖的识别。
[0062]
本实施例中采用计算机视觉算法识别图像数据中的井盖,输入为校正后的俯视视角的图像数据,检测有井盖的图像,并在有井盖的图像上框选出井盖的外接矩形,输出外接矩形的长a和宽b作为井盖的尺寸,输出外接矩形中心距离图像左右车道线的两个像素距离d1,d2作为相对位置信息。所述计算机视觉算法包括:yolov1、yolov2、yolov3和ssd等一阶段目标检测算法。如图4所示,左侧为利用图像校正算法校正后的俯视视角的前视图像,右侧图像中井盖边缘实线框为井盖的外接矩形。
[0063]
本实施例中,yolov3算法进行井盖识别。
[0064]
步骤s3:进行井盖的有效性判断,对井盖进行有效性判断时,建立虚拟轮迹带,位置与虚拟轮迹带相交的井盖为有效井盖,将有效井盖对应的图像采集时间戳与振动数据匹配,获取有效井盖的振动数据。
[0065]
具体地,虚拟轮迹带为:俯视视角的图像数据中左右车道线间像素距离为l,取距离左车道线l/3像素距离、右车道线l/3像素距离内区域作为虚拟轮迹带。如图5所示,左侧为利用图像校正算法校正后的俯视视角的前视图像,右侧图像中虚线框为虚拟轮迹带。
[0066]
有效井盖的判断标准为:井盖位置满足d1<l/3+a/2或d2<l/3+a/2的井盖为有效井盖,其中,d1为井盖外接矩形距离左车道线的像素距离,d2为井盖外接矩形距离右车道线的像素距离。
[0067]
本实施例步骤s3中仅对前视图像数据进行有效井盖的判断,将有效井盖对应的图像采集时间戳匹配,然后根据时间戳进行振动数据切分,获取有效井盖对应的图像采集时刻及前后各c秒作为该有效井盖的采集时间段,本实施例中采用前后各5秒共11秒的振动数据。针对每一秒,从三轴加速度传感器获取的振动数据中分割出z轴的分量。
[0068]
步骤s4:进行井框差测量。计算振动数据z轴分量的rms指标,并进行速度修正,获
取当量rms指标。
[0069]
本方法中,利用有效井盖的振动数据z轴分量的rms指标代表该有效井盖的井框差的大小程度,获取当量rms指标。由于车辆振动数据的rms指标可用以评价车辆由所途径路面产生的颠簸程度,一般情况经过平坦路面的rms指标基本一致且较低可忽略不计,但是经过有效井盖后的rms指标,会有较大差异,且与井框差大小呈正相关关系,同时,当量rms指标可将颠簸程度均一化为同一标准,因此当量rms指标能均一化地代表井框差的大小。
[0070]
计算振动数据z轴分量的rms指标的步骤包括:
[0071]
提取振动数据中有效井盖对应的采集时间段内的t秒振动数据,计算每秒振动数据的z轴分量的均方根值并取最大值作为rms指标:
[0072]
rms_max=max(z1,z1,
…
,z
t
‑1,z
t
)
[0073]
其中,rms_max为rms指标,z
t
为时间t的z轴分量的均方根值,本实施例中,t=11。
[0074]
并且,其中,
[0075][0076]
其中,z
tn
为时间t的第n个z轴分量,n为每秒的分量个数。
[0077]
对获取的rms指标进行速度修正,获取当量rms值:
[0078]
将所有车速条件下计算的rms指标换算为等效速度下的当量rms值,计算公式为如下
[0079][0080]
其中,rms_max
revised
为当量rms值,rms
max
为rms指标,v
e
为等效速度,v为rms指标对应的当前速度。
[0081]
本实施例中,至此,已获取有效井盖对应的取当量rms值,作为其井框差大小的衡量标准,进一步,为了便于对井盖的井框差大小进行分级,获取其对应井框差大小的等级,引入步骤s5:进行井框差程度分级,根据样本井框差程度与振动数据rms指标的拟合关系,给定速度修正后的rms指标,输出井框差程度分级。
[0082]
本实施例中,采集多处不同高度井框差作为样本,对其井框差等级进行分级标记,标准分为1
‑
10分,数字越大,井框差越大,程度越严重,精度到0.1。并获取这些井盖通过步骤s2
‑
4计算得到的当量rms值。以所述速度修正后的当量rms值为自变量,以井框差程度分级为因变量,拟合得到:
[0083][0084]
作为井框差程度分级函数,d为井框差等级,m、n为计算参数。之后,输入任意一处有效井盖的速度修正后的当量rms值,均根据分级函数d获取其井框差程度等级。
[0085]
另外,本实施例中,为了提高检测准确性,确保井盖图像识别准确性,进行人工井框差程度复核。利用有效井盖对应的图像采集时间戳匹配,利用时间错位提取该时间戳
‑
2~+3秒附近区域内后视图像数据,获取该段后视图像数据的俯视图像,进行人工井框差程度复核,复核内容包括图像内是否有井框、井框差实际大小与预测大小是否一致。
[0086]
上述实施方式仅为例举,不表示对本发明范围的限定。这些实施方式还能以其它各种方式来实施,且能在不脱离本发明技术思想的范围内作各种省略、置换、变手。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1