基于布点的模式匹配融合重建方法
1.本发明涉及不同尺度的三维岩心图像融合重建的方法,尤其涉及基于布点的模式匹配融合重建方法,属于三维图像重建技术领域。
背景技术:
2.数字岩心成像往往存在着视域和分辨率之间的矛盾。若直接对大尺度(如厘米级柱塞状)岩心扫描,获得的岩心图像视域较大但分辨率较低,难以捕获小孔隙信息;若对切割后的小尺度(如毫米级)岩心样本扫描,成像分辨率较高,但对应的视域范围受限。因而有必要研究如何利用不同尺度的高、低分辨率岩心图像,以融合重建的方式构建更加完备的大尺度高分辨率三维孔隙结构。
3.岩心领域的数字重建技术是通过获取岩心图像的二维或者三维信息,应用数学方法对其建模,构建岩心的三维结构。目前,基于数学建模的重建算法往往是以假设重建结构各向同性为前提的,以均质岩心图像,即孔隙分布比较均匀的图像为研究对象,这类算法的理论发展已经比较成熟。然而,在实际工程应用中还存在着一定数量的非均质岩心图像,它们往往形态各异,孔隙分布不均匀。针对非均质岩心图像的三维重建,近年来已经逐渐受到学者们的关注。本发明提出的基于先验布点模式匹配的融合重建算法,是利用高分辨率图像中的孔隙位置分布信息来引导小孔结构在低分辨率大孔结构背景中的重建,进而解决非均质岩心图像融合重建的问题。
技术实现要素:
4.本发明的主要目的在于通过提取小尺度三维高分辨率岩心图像中孔隙的形态和位置信息,以插值放大后的大尺度三维低分辨率岩心图像为背景,融合重建出同时具有大孔结构和小孔结构,且孔隙空间分布和小尺度高分辨率图像趋于一致的大尺度三维高分辨率岩心图像。
5.本发明通过以下技术方案来实现上述目的:
6.基于布点的模式匹配融合重建方法,包括以下步骤:
7.(1)已知三维高分辨率岩心图像和三维低分辨率岩心图像,通过将低分辨率图像插值放大的方式统一两者的分辨率;
8.(2)以三维低分辨率岩心图像为背景初始化待融合重建图像,其中的孔隙点为固定不变的点;
9.(3)统计三维高分辨率岩心图像的孔径分布,只保留孔径小于低分辨率图像中最小孔径的孔隙,作为小孔训练图像;
10.(4)根据信息熵的一阶差分确定扫描小孔训练图像的最佳模板尺寸;
11.(5)根据步骤(4)中确定的最佳模板对小孔训练图像进行扫描,建立有序模式字典,并存储为固定文件;
12.(6)根据三维高分辨率岩心图像包含的孔隙结构的位置分布信息,在待融合重建
图像中进行约束布点;
13.(7)根据布点数目,从有序模式字典中随机选取对应数目的初始模式,并放置在待融合重建图像中的布点位置;
14.(8)根据互相关函数距离度量方法,在有序模式字典中搜索布点位置处待匹配模式的最佳匹配模式,并将模板以滑窗形式向任意方向平移一个步长获取到新的待匹配模式,重复上述步骤,直至重建小孔结构的孔隙度和高分辨率图像中小孔结构的孔隙度一致。
15.所述步骤(4)中,通过用不同尺寸的三维模板(n
×n×
n)以光栅路径扫描小孔训练图像,获取图像对应的三维模式块,若三维模式块中包含孔隙点,则将此时三维模式块中包含的像素点集合称为模式,统计每种模式出现的频率,并计算信息熵,信息熵的公式定义为:
[0016][0017]
其中,k代表模式的种类数,pi表示第i种模式的出现频率,h越大,意味着通过该尺寸的模板提取到的模式信息越丰富,对于非均质岩心图像,由于其各向异性较强,复杂度较高,h将随着模板尺寸的增大而持续增大,在模板尺寸较小的时候,h的变化十分明显,随着模板尺寸的增大而急剧增大;当模板尺寸增大到某一临界值时,h的增长幅度放缓,可以认为模板通过扫描获取的模式集具有统计平稳的特征,因此,计算h的一阶差分以获得最佳模板尺寸,一阶差分可以代表h的变化幅度,变化幅度趋于平稳表示模板扫描到的模式信息熵趋于稳定,它被定义为:
[0018]
δh=h
l-h
l-1
ꢀꢀꢀ
(2)
[0019]
其中,l表示模板的尺寸,考虑到将信息熵运用到模板尺寸的选择,是为了确定复现训练图像模式信息所需要的最少信息,而模板尺寸过大会增加额外的计算负担,因此以一阶差分达到峰值时对应的模板尺寸为最佳模板尺寸。
[0020]
所述步骤(5)中,有序模式字典是用最佳模板建立小孔训练图像的模式集,以模式的孔隙点占比,即每个模式中的孔隙点数占总像素点数的比例为依据对模式集进行划分,将孔隙点占比相同的模式存入同一个子模式集中,建立起孔隙点占比与多个模式的一对多的映射关系,形成模式字典,再以二进制编码的方式对每种模式进行编码,以编码为基础对每一个子模式集进行排序,形成有序模式字典并存储为固定文件,以进行重建过程中的有序查找。
[0021]
所述步骤(6)中,约束布点策略的具体步骤为:首先分别计算三维高、低分辨率岩心图像中的孔径,设低分辨率图像的孔径范围为d
min
~d
max
,高分辨率图像的孔径范围为d
min
~d
max
,其中d
max
~d
min
,将高分辨率图像中孔径范围在d
min
~d
min
的孔隙结构标注为小孔结构,孔径范围在d
min
~d
max
的孔隙结构标注为大孔结构,然后以小孔结构的中心坐标为基准,以步骤(4)中确定的最佳模板尺寸为搜索半径,搜寻小孔结构的邻域内是否存在大孔结构的像素点,遍历三维高分辨率图像中的每一个小孔结构,计算布点比例λ:
[0022][0023]
其中,ma为邻域内存在大孔结构的小孔数目,mb为邻域内不存在大孔结构的小孔数目,据此进一步计算靠近大孔结构的布点数量n
p
:
[0024][0025]
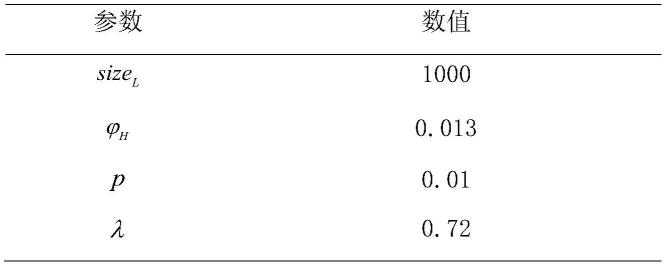
其中,size
l
表示插值放大后的低分辨率岩心图像的尺寸,表示高分辨率图像中小孔结构的孔隙度,p表示布点概率。
[0026]
所述步骤(8)中,从模式字典中搜索最佳匹配模式时,先计算待匹配模式的孔隙点占比,然后在模式字典中找到对应孔隙点占比的子模式集,以互相关函数匹配方法计算待匹配模式与子模式集中所有模式的匹配度:
[0027][0028]
其中,n为模板尺寸,pat
rec
和patn分别表示融合重建图像中待匹配的模式和子模式集中第n个被匹配的模式,m为子模式集的模式总数,(x,y,z)为待匹配模式第一个像素点的坐标,pat
rec
(x+i,y+j,z+k)为该点的像素值,i、j和k表示沿x、y和z方向的移动距离,
⊙
表示求同或的运算符。
附图说明
[0029]
图1为本发明实例中三维高分辨率岩心图像(左)和三维低分辨率岩心图像(右);
[0030]
图2为本发明实例中三维高分辨率岩心图像和三维低分辨率岩心图像的孔径分布关系图;
[0031]
图3为本发明实例中融合重建的结果;
[0032]
图4为本发明实例中融合重建图像和真实高分辨率岩心图像的孔径对比。
具体实施方式
[0033]
下面用具体实施例并结合附图对本发明作更详细的说明,但所述实施例只是针对本发明的实现方法作一个具体的详细说明,而不应理解为是对本发明保护内容的任何限制。
[0034]
(1)图1为统一分辨率后的三维高、低分辨率岩心图像,分辨率均为1μm/像素点,其中左图为高分辨率岩心图像,尺寸为512
×
512
×
512,右图为插值放大后的低分辨率岩心图像,尺寸为1000
×
1000
×
1000。
[0035]
(2)以图1插值放大后的低分辨率图像(右)为待融合重建的初始图像,其中的孔隙点为融合过程中不能被改变的点。
[0036]
(3)计算三维高分辨率图像和插值放大后三维低分辨率图像的孔径范围,两者的孔径关系如图2所示,此实例中d
min
~d
max
为0.78~158.49μm,d
min
~d
max
为12.88~291.53μm,则在高分辨率图像中将孔径在12.88~158.49μm之间的孔隙标注为大孔结构,将孔径小于12.88μm的孔隙标注为小孔结构,只保留三维高分辨率图像中的小孔结构作为建立模式字典的小孔训练图像。
[0037]
(4)通过用不同尺寸的三维模板扫描小孔训练图像,获取小孔结构对应的三维模式块,统计每种模式出现的频率,根据公式(1)计算信息熵,根据公式(2)计算得到该样本信息熵的一阶差分最大时对应的模式尺寸8作为最佳模板尺寸。
[0038]
(5)使用最佳尺寸的模板(此实例中的尺寸为8
×8×
8)扫描小孔训练图像提取模
式,以孔隙点占比,即每个模式中孔隙点数占总像素点数的比例为依据对模式集进行划分,将孔隙点占比相同的模式存入同一个子模式集中,建立起孔隙点占比与多个模式的一对多的映射关系,形成模式字典,以二进制编码的方式对每种模式进行编码,以编码为基础对每一个子模式集进行排序,形成有序模式字典并存储为固定文件,以进行重建过程中的有序查找。
[0039]
(6)以三维高分辨率岩心图像中的小孔结构的中心坐标为基准,以最佳模板尺寸(此实例中为8)为搜索半径,搜寻小孔结构的邻域内是否存在大孔结构的像素点,统计三维高分辨率岩心图像靠近和远离大孔结构的小孔结构数量之比,得到λ为72%,根据公式(4)确定靠近大孔结构的布点数量n
p
,本实例中各参数值如表1。
[0040]
表1
[0041][0042]
(7)根据互相关函数距离度量方法,在有序模式字典中搜索布点位置处待匹配模式的最佳匹配模式,并将模板以滑窗形式向任意方向平移一个步长获取到新的待匹配模式,重复上述步骤,直至重建小孔结构的孔隙度和高分辨率图像中小孔结构的孔隙度一致。
[0043]
(8)图3为融合重建的结果和对其进行局部放大的展示,其中,浅灰色像素点表示低分辨率图像中固定不变的大孔结构,深灰色像素点表示重建的小孔结构,为了说明融合结果有效利用了高、低分辨率图像孔隙结构信息的互补性,相对于三维低分辨率岩心图像而言补充了小孔结构信息,相对于三维高分辨率岩心图像而言补充了大孔结构信息,我们统计了融合前后图像的孔径范围,结果如表2所示。
[0044]
表2
[0045][0046]
从表中可以看出,融合重建图像同时包含高、低分辨率图像的孔隙尺寸信息,图中的最大孔径尺寸大于低分辨率三维结构中的最大孔径,这是由于重建的小孔结构虽然不能改变真实大孔结构的位置分布,但可以与其连通,丰富其细节信息,而不全是孤立存在的,因此大孔结构的尺寸也会有所增大。
[0047]
为了定量地比较融合重建图像的孔径分布,这里将融合重建图像和真实高分辨率岩心图像的孔径对比展示在图4中。可以看到,融合重建图像相对于真实高分辨率图像的孔径范围更大,说明能捕获到更多的大孔结构信息,而在相同孔径范围内的孔径分布一致,说
明同时保持了高分辨率图像的孔隙结构信息。
[0048]
表3
[0049][0050]
为了进一步分析重建的小孔结构的有效性,这里单独提取出融合结果中重建的小孔结构,将它与真实高分辨率图像中的小孔结构进行了形态参数的比较,结果如表3所示。
[0051]
通过观察比较表3中的数据,重建小孔结构的各项形态参数与真实小孔结构的参数误差较小,说明本发明也能够较好地复现真实孔隙结构的形态特征。
[0052]
上述实施例只是本发明的优选实施案例,并不是对本发明所述技术方案的限制,只要是不经过创造性劳动即可在上述实施案例的基础上实现的技术方案,均应视为落入本发明内容的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1