一种智能驾驶行车安全约束方法及系统、车辆与流程
1.本发明涉及智能驾驶技术领域,尤其涉及一种智能驾驶行车安全约束方法及系统、车辆。
背景技术:
2.近年来,随着互联网技术的飞速发展给汽车带来了革命性的变化,汽车智能化技术也得到了广泛的应用。汽车的智能化带给用户更加安全、舒适的驾乘体验的同时也使得用户更加依赖汽车智能化系统从而降低用户驾驶时的警觉性,若存在系统无法及时处理的突发情况,用户则无法第一时间介入车辆控制,可能会引发不必要的事故。
3.由于国内相对复杂的道路情况以及目前传感器感知能力的发展情况,当前的智能驾驶功能无法完全识别事故和防止事故的发生,且不能防止由于用户滥用自动驾驶功能导致事故发生前不能及时接管车辆的场景。
技术实现要素:
4.本发明的目的是提供一种智能驾驶行车安全约束方法及系统、车辆,有针对性的对不同类型的用户进行智能驾驶功能匹配,匹配出能确保当前用户行车安全的智能驾驶功能,以最大限度避免有用户引起的驾驶安全事件,从而保证在使用智能驾驶功能的过程中的行车安全。
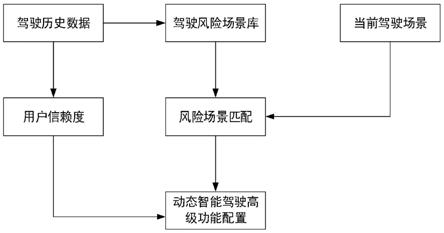
5.为实现上述目的,本发明提供了一种智能驾驶行车安全约束方法,步骤包括:
6.获取本车驾驶历史数据,根据本车驾驶历史数据对用户驾驶习惯进行统计分析并形成用户画像,计算出对应该用户的用户信赖度;
7.获取当前驾驶场景,将当前驾驶场景与驾驶风险场景库进行匹配,得到风险场景匹配度;其中,驾驶风险场景库是根据本车驾驶历史数据统计得出且其内划分有多个风险场景匹配度;
8.根据该用户的用户信赖度和风险场景匹配度确定出当前驾驶场景是否禁用智能驾驶高级功能。
9.进一步,用户信赖度根据遵守交通规则程度和智能驾驶功能使用保守度计算得出;
10.用户信赖度的计算公式为:
11.d
用户信赖度
=c6×
d
遵守交通规则程度
+c7×
d
智能驾驶功能保守度
;
[0012][0013]
智能驾驶功能使用保守度的计算公式为:
[0014]
[0015]
其中,d
遵守交通规则程度
为遵守交通规则程度;d
智能驾驶功能保守度
为智能驾驶功能使用保守度;d
用户信赖
度为用户信赖度;d
车辆违规程度
为车辆操控违规程度,车辆操控违规程度根据车辆操控违规次数计算得出;d
智能驾驶功能滥用程度
为智能驾驶功能滥用程度;c6和c7均为小于等于1的系数且根据车辆操控违规程度严重性决定,c6+c7=1,且c6>0,c7>0;d
总里程数
为车辆行驶总里程数。
[0016]
进一步,车辆操控违规包括车辆压实线、车辆闯红灯和非法停车;车辆操控违规程度的计算公式为:
[0017]
d
车辆违规程度
=c1×
n
车辆压实线次数
+c2×
n
车辆闯红灯次数
+c3×
n
非法停车次数
;
[0018]
智能驾驶功能使用度的计算公式为:
[0019]
d
智能驾驶功能滥用程度
=c4×
n
疲劳次数
+c5×
n
触发报警次数
;
[0020]
其中,n
车辆压实线次数
为车辆压实线次数,n
车辆闯红灯次数
为车辆闯红灯次数,n
非法停车次数
为非法停车次数,n
疲劳次数
为智能驾驶功能使用期间驾驶员注意力分散或疲劳次数,n
触发报警次数
为智能驾驶功能使用期间触发报警次数,d
车辆违规程度
为车辆操控违规程度,d
智能驾驶功能滥用程度
为智能驾驶功能滥用程度,d
总里程数
为车辆行驶总里程数,c1、c2、c3、c4和c5均为大于0且小于等于1的系数,c1、c2、c3、c4和c5根据车辆操控违规程度严重性决定。
[0021]
进一步,驾驶风险场景库内划分有3个风险场景匹配度;3个风险场景匹配度分别为低风险场景、中风险场景和高风险场景。
[0022]
进一步,所述将当前驾驶场景与驾驶风险场景库进行匹配,得到风险场景匹配度,具体执行以下步骤:
[0023]
(s1)获取本车当前地点坐标值,判断驾驶风险场景库中是否存在该地点,若是,则转至执行步骤(s2);否则,则当前驾驶场景为低风险场景;
[0024]
(s2)获取本车当前时间,判断当前时间是否在该驾驶风险场景库中的时间范围内,若是,则转至执行步骤(s3);否则,则当前驾驶场景为低风险场景;
[0025]
(s3)判断在该驾驶风险场景库中的发生次数是否超过预设次数阈值n1,若是,则当前驾驶场景为高风险场景;否则,则当前场景为中风险场景。
[0026]
进一步,智能驾驶高级功能包括脱手功能和脱眼功能。
[0027]
进一步,根据用户信赖度和风险场景匹配度确定出当前驾驶场景是否禁用脱手功能和脱眼功能,具体如下表:
[0028][0029]
进一步,所述驾驶风险场景库是根据本车驾驶历史数据统计得出,具体执行以下步骤:
[0030]
(d1)获取本车的减速度值,并判断减速度是否大于减速度阈值a
cc
,若是,则判断为驾驶风险场景,并转至执行步骤(d2);否则,重复执行步骤(d1);
[0031]
(d2)获取当前时间段和当前地点坐标值,判断驾驶风险场景库中是否存在该地点坐标预设距离范围内的数据,若是,转至执行步骤(d3),否则,则历史驾驶风险场景库不存
在该驾驶风险场景,转至执行步骤(d5);
[0032]
(d3)判断驾驶风险场景库中该地点数据时间是否与当前记录时间匹配,若是,则历史驾驶风险场景库存在该驾驶风险场景,执行步骤(d4);否则,则历史驾驶风险场景库不存在该驾驶风险场景,转至执行步骤(d5);
[0033]
(d4)更新历史驾驶风险场景库发生次数段,将该场景发生次数累计加1;
[0034]
(d5)将该驾驶风险场景记录在驾驶风险场景库中。
[0035]
本发明还提供一种智能驾驶系统,包括存储器和处理器,所述存储器内存储有计算机可读程序,所述计算机可读程序被处理器调用时,能执行所述智能驾驶行车安全约束方法的步骤。
[0036]
本发明还提供一种车辆,包括所述的智能驾驶系统。
[0037]
本发明与现有技术相比较具有以下优点:
[0038]
本发明的智能驾驶行车安全约束方法,基于本车驾驶历史数据对用户驾驶习惯进行统计分析并形成用户画像,有针对性的对不同类型的用户进行智能驾驶功能匹配,对于有长期滥用智能驾驶功能倾向的用户根据各智能驾驶设计运行范围进行适当的收窄约束,匹配出能确保当前用户行车安全的智能驾驶功能,以最大限度避免有用户引起的驾驶安全事件,从而保证在使用智能驾驶功能的过程中的行车安全;在一些高级功能禁用时,智能驾驶系统提示用户保持注意力及时接管车辆;智能驾驶系统可根据计算得出的脱手脱眼功能限制结果进行智能驾驶功能约束从而保证智能驾驶行车安全。
附图说明
[0039]
图1为本发明智能驾驶行车安全约束方法的流程图;
[0040]
图2为本发明驾驶风险场景库识别的流程图;
[0041]
图3为本发明风险场景匹配度识别的流程图。
具体实施方式
[0042]
下面结合附图对本发明的具体实施方式作进一步说明。
[0043]
参见图1所示,本实施例公开了一种智能驾驶行车安全约束方法,步骤包括:
[0044]
获取本车驾驶历史数据,根据本车驾驶历史数据对用户驾驶习惯进行统计分析并形成用户画像,计算出对应该用户的用户信赖度;
[0045]
获取当前驾驶场景,将当前驾驶场景与驾驶风险场景库进行匹配,得到风险场景匹配度;其中,驾驶风险场景库是根据本车驾驶历史数据统计得出且其内划分有多个风险场景匹配度;
[0046]
根据该用户的用户信赖度和风险场景匹配度确定出当前驾驶场景是否禁用智能驾驶高级功能。
[0047]
基于本车驾驶历史数据对用户驾驶习惯进行统计分析并形成用户画像,有针对性的对不同类型的用户进行智能驾驶功能匹配,对于有长期滥用智能驾驶功能倾向的用户根据各智能驾驶设计运行范围进行适当的收窄约束,以最大限度避免有用户引起的驾驶安全事件,从而保证在使用智能驾驶功能的过程中的行车安全。根据上述计算出的用户信赖度和风险场景匹配度,智能驾驶系统就可以匹配出能确保当前用户行车安全的智能驾驶功
能。
[0048]
在本实施例中,部分或全部智能驾驶高级功能禁用时,智能驾驶系统提示保持注意力及时接管车辆。
[0049]
在本实施例中,用户信赖度根据遵守交通规则程度和智能驾驶功能使用保守度计算得出;
[0050]
用户信赖度的计算公式为:
[0051]
d
用户信赖度
=c6×
d
遵守交通规则程度
+c7×
d
智能驾驶功能保守度
;
[0052][0053]
智能驾驶功能使用保守度的计算公式为:
[0054][0055]
其中,d
遵守交通规则程度
为遵守交通规则程度;d
智能驾驶功能保守度
为智能驾驶功能使用保守度;d
用户信赖
度为用户信赖度;d
车辆违规程度
为车辆操控违规程度,车辆操控违规程度根据车辆操控违规次数计算得出;d
智能驾驶功能滥用程度
为智能驾驶功能滥用程度;c6和c7均为小于等于1的系数且根据车辆操控违规程度严重性决定,c6+c7=1,且c6>0,c7>0;d
总里程数
为车辆行驶总里程数。
[0056]
在本实施例中,车辆操控违规包括车辆压实线、车辆闯红灯和非法停车;车辆操控违规程度的计算公式为:
[0057]
d
车辆违规程度
=c1×
n
车辆压实线次数
+c2×
n
车辆闯红灯次数
+c3×
n
非法停车次数
;
[0058]
智能驾驶功能使用度的计算公式为:
[0059]
d
智能驾驶功能滥用程度
=c4×
n
疲劳次数
+c5×
n
触发报警次数
;
[0060]
其中,n
车辆压实线次数
为车辆压实线次数,n
车辆闯红灯次数
为车辆闯红灯次数,n
非法停车次数
为非法停车次数,n
疲劳次数
为智能驾驶功能使用期间驾驶员注意力分散或疲劳次数,n
触发报警次数
为智能驾驶功能使用期间触发报警次数,d
车辆违规程度
为车辆操控违规程度,d
智能驾驶功能滥用程度
为智能驾驶功能滥用程度,d
总里程数
为车辆行驶总里程数,c1、c2、c3、c4和c5均为大于0且小于等于1的系数,c1、c2、c3、c4和c5根据车辆操控违规程度严重性决定。遵守交通规则程度主要由车辆操控违规程度与行驶里程计算得出,车辆违规程度计算包括驾驶员主动压实线超车、闯红绿灯、违规停车等方面事件,该事件主要通过智能驾驶车辆摄像头识别的车道线、红绿灯以及地图数据进行计算得出。
[0061]
在本实施例中,识别车辆压实线,具体执行以下步骤:
[0062]
(h1)获取车道线数据;
[0063]
(h2)计算车辆当前位置与车道线位置关系;
[0064]
(h3)判断车辆是否跨越实线车道线,若是,则判定车辆压实线,转至执行步骤(h1);否则,转至执行步骤(h1)。
[0065]
在本实施例中,识别车辆闯红灯,具体执行以下步骤:
[0066]
(f1)获取红绿灯和停止线数据;
[0067]
(f2)计算车辆当前位置与停止线位置关系;
[0068]
(f3)判断红绿灯是否为红灯且车辆跨过停止线未停止,若是,则车辆闯红灯,转至
执行步骤(f1);否则,转至执行步骤(f1)。
[0069]
在本实施例中,识别非法停车,具体执行以下步骤:
[0070]
(k1)获取当前车辆行驶车道类型;
[0071]
(k2)获取车辆行驶速度;
[0072]
(k3)判断是否在高速路或快速路停车,若是,则为非法停车,转至执行步骤(k1);否则,转至执行步骤(k1)。
[0073]
参见图2所示,驾驶风险场景库内划分有3个风险场景匹配度;3个风险场景匹配度分别为低风险场景、中风险场景和高风险场景。
[0074]
在本实施例中,所述将当前驾驶场景与驾驶风险场景库进行匹配,得到风险场景匹配度,具体执行以下步骤:
[0075]
(s1)获取本车当前地点坐标值,判断驾驶风险场景库中是否存在该地点,若是,则转至执行步骤(s2);否则,则当前驾驶场景为低风险场景;
[0076]
(s2)获取本车当前时间,判断当前时间是否在该驾驶风险场景库中的时间范围内,若是,则转至执行步骤(s3);否则,则当前驾驶场景为低风险场景;
[0077]
(s3)判断在该驾驶风险场景库中的发生次数是否超过预设次数阈值n1,若是,则当前驾驶场景为高风险场景;否则,则当前场景为中风险场景。风险场景匹配度将根据当前车辆位置与当前时间逐一和驾驶风险场景库进行匹配,首先匹配地理位置,其次匹配时间,最后根据场景库中该地点该时间发生的次数判断场景风险度。
[0078]
在本实施例中,智能驾驶高级功能包括脱手功能和脱眼功能。
[0079]
在本实施例中,根据用户信赖度和风险场景匹配度确定出当前驾驶场景是否禁用脱手功能和脱眼功能,具体如下表:
[0080][0081]
参见图3所示,所述驾驶风险场景库是根据本车驾驶历史数据统计得出,具体执行以下步骤:
[0082]
(d1)获取本车的减速度值,并判断减速度是否大于减速度阈值a
cc
,若是,则判断为驾驶风险场景,并转至执行步骤(d2);否则,重复执行步骤(d1);
[0083]
(d2)获取当前时间段和当前地点坐标值,判断驾驶风险场景库中是否存在该地点坐标预设距离范围内的数据,若是,转至执行步骤(d3),否则,则历史驾驶风险场景库不存在该驾驶风险场景,转至执行步骤(d5);
[0084]
(d3)判断驾驶风险场景库中该地点数据时间是否与当前记录时间匹配,若是,则历史驾驶风险场景库存在该驾驶风险场景,执行步骤(d4);否则,则历史驾驶风险场景库不存在该驾驶风险场景,转至执行步骤(d5);
[0085]
(d4)更新历史驾驶风险场景库发生次数段,将该场景发生次数累计加1;
[0086]
(d5)将该驾驶风险场景记录在驾驶风险场景库中。
[0087]
在本实施例中,减速度阈值a
cc
为紧急刹车的减速度值。在某些实施例中,减速度阈值a
cc
的设置并不以此为限。
[0088]
在本实施例中,预设距离为500m;在某些实施例中,预设距离也可以取其他数值,在此不作限定。
[0089]
在本实施例中,获取当前时间段,具体执行以下步骤:先获取当前时间点,然后将该时间点处理成当前时间段。例如,当前时间点为x,当前时间段为x
‑
n~x+n。n取1h或其他数值,并不以此为限。
[0090]
驾驶风险场景库主要由时间、地点、发生次数三个方面因素组成,该驾驶风险场景库主要用于反应历史驾驶地点在某时间段的行车路况,通常,将减速度值大于a
cc
时的时间、地点(坐标位置)、道路类型记录为驾驶风险场景,如果事件发生的地点在历史风险场景库中存在(地点坐标值相差
±
500m内)且事件发生时间与该风险场景库接近(时间在风险场景库中时间段内),则更新历史风险场景库发生次数字段。如果事件发生地点在历史风险场景库中不存在或该地点发生时间在风险场景库中不存在,则新建场景库数据。
[0091]
本实施例公开了一种智能驾驶系统,包括存储器和处理器,所述存储器内存储有计算机可读程序,所述计算机可读程序被处理器调用时,能执行上述智能驾驶行车安全约束方法的步骤。
[0092]
本实施例公开了一种车辆,包括上述的智能驾驶系统。
[0093]
本发明的智能驾驶行车安全约束方法,基于本车驾驶历史数据对用户驾驶习惯进行统计分析并形成用户画像,有针对性的对不同类型的用户进行智能驾驶功能匹配,对于有长期滥用智能驾驶功能倾向的用户根据各智能驾驶设计运行范围进行适当的收窄约束,匹配出能确保当前用户行车安全的智能驾驶功能,以最大限度避免有用户引起的驾驶安全事件,从而保证在使用智能驾驶功能的过程中的行车安全;在一些高级功能禁用时,智能驾驶系统提示用户保持注意力及时接管车辆;智能驾驶系统可根据计算得出的脱手脱眼功能限制结果进行智能驾驶功能约束从而保证智能驾驶行车安全。
[0094]
以上详细描述了本发明的较佳具体实施例。应当理解,本领域的普通技术人员无需创造性劳动就可以根据本发明的构思作出诸多修改和变化。因此,凡本技术领域中技术人员依本发明的构思在现有技术的基础上通过逻辑分析、推理或者有限的实验可以得到的技术方案,皆应在由权利要求书所确定的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1