一种基于IGES模型引导的点云曲面分割方法
一种基于iges模型引导的点云曲面分割方法
技术领域
1.本发明涉及大数据领域,具体是一种基于iges模型引导的点云曲面分割方法。
背景技术:
2.目前,针对点云分割的算法主要有以下几种:1)基于边缘信息;2)基于区域生长;3)基于聚类的点云分割;4)随机采样一致性;
3.以上方法存在的问题:方法1分割的效果在很大程度上取决于边缘探测器。无法保证分割的准确性和一致性。方法2对种子初选位置要求很高,并且区域增长过程容易受到噪声点的影响,分割的结果也随种子选取的不同而不同。方法3虽然参数设置灵活、抗干扰能力强,但其收敛速度慢效率较低。方法4能够抑制噪声点的影响,相较于方法3其计算效率也较高,但对于具有较多噪声点的点云数据,每次随机选取的初始样本子集会影响或无法找到足够的点支撑样本子集从而忽略子集。
4.同时,传统的点云分割算法针对的是多物体存在的点云空间,对不同物体的点云进行语义分割,或是对某一点云场景中所有具有相同几何特征的点云簇进行分离,而对于机械零件的点云模型,具有相同几何特征的点云簇,如两个平面点云簇,在机械中具有不同的语义特征,因此将这些方法应用于对点云模型中任意曲面的划分效果并不理想。有些学者也针对单一物体点云的各个曲面进行分割,但他们往往只能分割零件的规则曲面,而对于裁剪后的非规则曲面无法进行分割。
技术实现要素:
5.本发明的目的是提供一种基于iges模型引导的点云曲面分割方法,包括以下步骤。
6.1)获取待检测工件的标准iges模型。
7.2)对待检测工件进行ct扫描,建立出测量stl模型。
8.3)将所述标准iges模型离散化,得到离散stl模型。
9.将所述标准iges模型离散化的方法为loop细分法。
10.4)对测量stl模型和离散stl模型进行点云配准。
11.对测量stl模型和离散stl模型进行点云配准的步骤包括。
12.4.1)利用最小包围盒方法对测量stl模型和离散stl模型进行粗配准。
13.4.2)利用迭代最近点方法对测量stl模型和离散stl模型进行精配准,得到旋转平移矩阵。
14.4.3)基于旋转平移矩阵对测量stl模型进行旋转、平移,完成测量stl模型和离散stl模型的配准。
15.5)判断测量stl模型中的点与标准iges模型中曲面的归属关系。
16.判断测量stl模型中的点与标准iges模型中曲面的归属关系的步骤包括。
17.5.1)设定离散stl模型中所有三角面片的集合为t(t1,t2,t3,...,t
m
),标准iges模
型中所有曲面的集合为f(f1,f2,f3,...,f
n
),测量stl模型中所有点的集合为p(p1,p2,p3,...,p
k
)。离散stl模型中的三角面片t
i
属于标准iges模型的曲面f
i
。
18.5.2)计算出集合t中每个三角面片的平面方程。
19.任意三角面片的平面方程如下所示。
20.ax+by+cz+d=0
ꢀꢀꢀꢀ
(1)
21.其中,参数a、b、c、d分别如下所示。
22.a=y1(z2‑
z3)+y2(z3‑
z1)+y3(z1‑
z2)
ꢀꢀ
(2)
23.b=z1(x2‑
x3)+z2(x3‑
x1)+z3(x1‑
x2)
ꢀꢀ
(3)
24.c=x1(y2‑
y3)+x2(y3‑
y1)+x3(y1‑
y2)
ꢀꢀ
(4)
25.d=
‑
x1(y2z3‑
y3z2)
‑
x2(y3z1‑
y1z3)
‑
x3(y1z2‑
y2z1)
ꢀꢀ
(5)
26.式中,(x1,y1)、(x2,y2)、(x3,y3)分别为当前三角面片的三个顶点。
27.5.3)对集合p中的点与集合t中的三角面片进行匹配。其中,集合p中任意点p
i
匹配的三角面片记为t
i
。
28.对集合p中的点与集合t中的三角面片进行匹配的方法为。
29.计算集合p中点p
i
(x
i
,y
i
,z
i
)到集合t中每个三角面片的距离,得到距离集合其中,表示三角面片t
m,
与点p
i
之间的距离。以到点p
i
的距离为的三角面片为与点p
i
匹配的三角面片t
i
。为距离集合d
i
中的最小值。m’≤m。
30.所述距离集合d
i
为经过优化的集合。优化方法为。点p
i
向集合t中每个三角面片所在平面投影,得到投影点p
i
′
。若投影点p
i
′
位于当前三角面片外部,则点p
i
与当前三角面片之间的距离不写入距离集合d
i
中。
31.点p
i
与三角面片t
j
之间的距离如下所示。
[0032][0033]
式中,a
j
、b
j
、c
j
、d
j
为三角面片t
j
的平面方程参数。(x
i
,y
i
)为点p
i
的坐标。
[0034]
5.4)基于离散stl模型三角面片与标准iges模型曲面的映射关系,建立集合p中的点与标准iges模型曲面的映射关系和距离映射集合其中,对于集合f中的曲面f
n
,存在集合子集p
n
为集合p的子集。p1+p2+
…
+p
n
=p。表示属于曲面f
n
的第r个点,且与曲面f
n
之间的距离
[0035]
6)以测量stl模型中的点与标准iges模型中曲面的归属关系为基准,完成测量stl模型的曲面分割。
[0036]
7)选取标准iges模型待检测的曲面,并根据归属关系获取所述待检测曲面对应的点云簇。
[0037]
8)对所述点云簇进行曲面拟合,求解点云簇中点到拟合曲面的有向距离。所述有向距离用于对待检测工件进行形位误差分析。
[0038]
本发明的技术效果是毋庸置疑的,本发明利用iges模型的曲面作为引导对点云模型进行分割,通过将点和空间自由曲面匹配的问题转换为点和空间中三角面片匹配的问题,将空间自由曲面匹配问题降维,更易求得点和曲面的关系,利用点和iges模型曲面的匹配信息,对点云模型进行曲面分割。相较于经典的基于边缘的、区域生长的、属性分割等方法对不同物体进行点云分割或是提取某一类具有相同特征的点云簇,本发明的点云曲面分割方法针对单一物体点云,对点云中任意曲面进行分割,且整个分割过程不需要进行经验参数的设定。其分割原理简单、稳定性好、不受点云空间关系和点云密度的限制,同时分割精度高,缺点和遗漏点少。
附图说明
[0039]
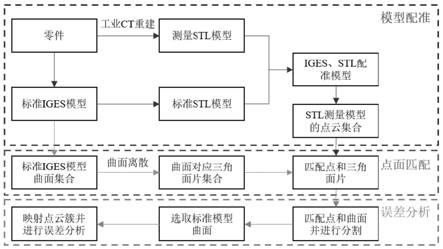
图1为方法流程图;
[0040]
图2为工业ct切片重建测量stl模型;
[0041]
图3为标准iges模型;
[0042]
图4为离散stl模型;
[0043]
图5为三维模型配准;
[0044]
图6(a)为iges模型曲面划分i;图6(b)为iges模型曲面划分ii;图6(c)为iges模型曲面划分iii;
[0045]
图7为支座零件点云曲面分割实验结果;图7(a)为支座零件原始模型;图7(b)为支座零件分割结果i、图7(c)支座零件分割结果ii、图7(d)为支座零件分割结果iii;
[0046]
图8为零件点云曲面分割结果;图8(a)为零件原始模型i;图8(b)为零件原始模型i的点云曲面分割结果;图8(c)为零件原始模型ii;图8(d)为零件原始模型ii的点云曲面分割结果;
[0047]
图9为距离d
i
计算示意图;
[0048]
图10为实际待测点相对理想位置的变动示意图;
[0049]
图11为形位误差分析示意图;
[0050]
图12为进行表圆柱度和平面度误差分析的零件图;
[0051]
图13为进行表垂直度和平行度误差分析的零件图。
具体实施方式
[0052]
下面结合实施例对本发明作进一步说明,但不应该理解为本发明上述主题范围仅限于下述实施例。在不脱离本发明上述技术思想的情况下,根据本领域普通技术知识和惯用手段,做出各种替换和变更,均应包括在本发明的保护范围内。
[0053]
实施例1:
[0054]
参见图1至图9,一种基于iges模型引导的点云曲面分割方法,包括以下步骤。
[0055]
1)获取待检测工件的标准iges模型。
[0056]
2)对待检测工件进行ct扫描,建立出测量stl模型。
[0057]
3)将所述标准iges模型离散化,得到离散stl模型。
[0058]
将所述标准iges模型离散化的方法为loop细分法。
[0059]
4)对测量stl模型和离散stl模型进行点云配准。
[0060]
对测量stl模型和离散stl模型进行点云配准的步骤包括。
[0061]
4.1)利用最小包围盒方法对测量stl模型和离散stl模型进行粗配准。
[0062]
4.2)利用迭代最近点方法对测量stl模型和离散stl模型进行精配准,得到旋转平移矩阵。
[0063]
4.3)基于旋转平移矩阵对测量stl模型进行旋转、平移,完成测量stl模型和离散stl模型的配准。
[0064]
5)判断测量stl模型中的点与标准iges模型中曲面的归属关系。
[0065]
判断测量stl模型中的点与标准iges模型中曲面的归属关系的步骤包括。
[0066]
5.1)设定离散stl模型中所有三角面片的集合为t(t1,t2,t3,...,t
m
),标准iges模型中所有曲面的集合为f(f1,f2,f3,...,f
n
),测量stl模型中所有点的集合为p(p1,p2,p3,...,p
k
)。离散stl模型中的三角面片t
i
属于标准iges模型的曲面f
i
。
[0067]
5.2)计算出集合t中每个三角面片的平面方程。
[0068]
任意三角面片的平面方程如下所示。
[0069]
ax+by+cz+d=0
ꢀꢀꢀꢀꢀ
(1)
[0070]
其中,参数a、b、c、d分别如下所示。
[0071]
a=y1(z2‑
z3)+y2(z3‑
z1)+y3(z1‑
z2)
ꢀꢀ
(2)
[0072]
b=z1(x2‑
x3)+z2(x3‑
x1)+z3(x1‑
x2)
ꢀꢀ
(3)
[0073]
c=x1(y2‑
y3)+x2(y3‑
y1)+x3(y1‑
y2)
ꢀꢀ
(4)
[0074]
d=
‑
x1(y2z3‑
y3z2)
‑
x2(y3z1‑
y1z3)
‑
x3(y1z2‑
y2z1)
ꢀꢀ
(5)
[0075]
式中,(x1,y1)、(x2,y2)、(x3,y3)分别为当前三角面片的三个顶点。
[0076]
5.3)对集合p中的点与集合t中的三角面片进行匹配。其中,集合p中任意点p
i
匹配的三角面片记为t
i
。
[0077]
对集合p中的点与集合t中的三角面片进行匹配的方法为。
[0078]
计算集合p中点p
i
(x
i
,y
i
,z
i
)到集合t中每个三角面片的距离,得到距离集合其中,表示三角面片t
m,
与点p
i
之间的距离。以到点p
i
的距离为的三角面片为与点p
i
匹配的三角面片t
i
。为距离集合d
i
中的最小值。m’≤m。m’为经过优化后的三角面片序号,m为三角面片序号。
[0079]
所述距离集合d
i
为经过优化的集合。优化方法为。点p
i
向集合t中每个三角面片所在平面投影,得到投影点p
i
′
。若投影点p
i
′
位于当前三角面片外部,则点p
i
与当前三角面片之间的距离不写入距离集合d
i
中。
[0080]
点p
i
与三角面片t
j
之间的距离如下所示。
[0081][0082]
式中,a
j
、b
j
、c
j
、d
j
为三角面片t
j
的平面方程参数。(x
i
,y
i
)为点p
i
的坐标。
[0083]
5.4)基于离散stl模型三角面片与标准iges模型曲面的映射关系,建立集合p中的
点与标准iges模型曲面的映射关系和距离映射集合其中,对于集合f中的曲面f
n
,存在集合子集p
n
为集合p的子集。p1+p2+
…
+p
n
=p。表示属于曲面f
n
的第r个点,且与曲面f
n
之间的距离
[0084]
6)以测量stl模型中的点与标准iges模型中曲面的归属关系为基准,完成测量stl模型的曲面分割。
[0085]
7)选取标准iges模型待检测的曲面,并根据归属关系获取所述待检测曲面对应的点云簇;
[0086]
8)对所述点云簇进行曲面拟合,求解点云簇中点到拟合曲面的有向距离,并根据所述有向距离完成待检测工件形位误差分析。
[0087]
实施例2。
[0088]
参见图10至图13,一种基于iges模型引导的点云曲面分割方法,包括以下步骤。
[0089]
1)输入工件的标准iges模型和由工业ct扫描重建的测量stl模型,参见图2至图3。
[0090]
使用工业ct扫描零件获得的数据是包含零件内部结构的完备数据,对该数据使用mc算法进行三维重建生成包含内部曲面信息的测量stl模型。
[0091]
2)对工件cad模型进行离散化,使用loop细分将cad模型离散为能够进行点云配准的stl模型,参见图4。
[0092]
3)将标准stl模型和测量stl模型进行点云配准操作,由于工业ct获得的是测量零件的完备数据,使用最小包围盒算法进行粗配准,再利用迭代最近点(icp)进行精配准,可以得到一个旋转平移矩阵,在三维空间中,使用旋转平移操作对测量的stl模型进行变换,实现标准iges模型和测量stl模型的配准,得到图5所示的配准结果。
[0093]
4)判定测量stl模型中的点与标准stl模型中三角形的归属关系。设离散后的标准stl模型中所有三角形的集合为t(t1,t2,t3,
…
,t
m
),iges模型中所有曲面的集合为f(f1,f2,f3,
…
,f
n
)。设测量stl模型构成的点云模型中的所有的点的集合为p(p1,p2,p3,...,p
k
)。判定具体过程如下。
[0094]
4.1)对三维空间中的任意t
i
,已知其三点坐标,那么可以通过如下操作求t
i
平面方程。
[0095]
4.2)对集合p中的每个点p
i
(x
i
,y
i
,z
i
),遍历标准三角面片集合t,计算t中所有三角面片到p
i
的距离d
i
,得到距离集合其中表示t
m
到p
i
的距离。为集合d
i
中的最小值,t
i
表示集合t中到p
i
的距离为的三角形。假设t
i
的三点分别为a(x1,y1),b(x2,y2),c(x3,y3),空间平面方程的一般形式为ax+by+cz+d=0,那么有
[0096][0097]
[0098][0099][0100]
展开行列式,可得计算平面系数的表达式。
[0101]
a=y1(z2‑
z3)+y2(z3‑
z1)+y3(z1‑
z2)
[0102]
b=z1(x2‑
x3)+z2(x3‑
x1)+z3(x1‑
x2)
[0103]
c=x1(y2‑
y3)+x2(y3‑
y1)+x3(y1‑
y2)
[0104]
d=
‑
x1(y2z3‑
y3z2)
‑
x2(y3z1‑
y1z3)
‑
x3(y1z2‑
y2z1)
[0105]
最终可求得平面方程。
[0106]
4.3)对p中的点p
i
,向三角形所在平面γ投影,得到投影点p
′
i
,只有当p
i
在平面γ的投影点p
i
′
在t
i
中时进行点到平面γ的距离d
i
计算,否则视该点为无效点。
[0107][0108]
5)由于集合t
i
必然属于集合f中的某个曲面f
i
,最终形成点p
i
和曲面f
i
的映射关系,f
i
表示点p
i
的归属曲面。此时p
i
到f
i
的距离等于且当遍历完集合t和p后,即得到集合p中每个点和集合f中各个曲面的距离映射集合根据集合d中f
i
和p
i
的关系,对于集合f中的任意曲面f
n
,必定存在一个部分p的子集且p1+p2+
…
+p
n
=p。其中表示属于曲面f
n
的第r个点。
[0109]
至此,本实施例利用标准iges模型的曲面作为引导,以离散后的stl模型的三角面片作为中间变量,实现了点和空间自由曲面的匹配,完成了点云模型的曲面分割操作。
[0110]
6)完成测量stl模型和标准iges模型的点面映射后(即上述步骤5),后续可用于具有任意复杂内腔结构曲面的零件的形位误差分析。
[0111]
零件的形位误差包含形状和位置误差,它是指实际形状和实际位置相对理想位置的变动量,而实际待测点相对理想位置的变动量有正负之分,如图10所示,p1相对理想位置在零件外侧,其变动量d1为正,p2相对理想位置在零件内侧,其变动量d2为负,而距离集合d中的距离恒正,故要对集合d进行优化。
[0112]
优化距离集合d过程。
[0113]
以平面的法向量为基准,求待测点与法向量的内积,由内积的正负对距离集合d进行优化。平面的法向量n(a,b,c),将平面一般方程转换为点法式方程。
[0114]
a(x
‑
x
o
)+b(y
‑
y
o
)+c(z
‑
z
o
)=0
ꢀꢀꢀꢀ
(6)
[0115]
其中三角面片内一点o(x
o
,y
o
,z
o
),待测点p
i
(x
i
,y
i
,z
i
),则点o与点p
i
组成的向量op
i
(x
i
‑
x
o
,y
i
‑
y
o
,z
i
‑
z
o
)。sig表示内积的正负,n
·
op
i
表示法向量n和op
i
的内积,使用sig对集合d进行优化。
[0116]
n
·
op
i
=a(x
i
‑
x)+b(y
i
‑
y
o
)+c(z
i
‑
z
o
)
[0117][0118][0119]
形位误差具体计算过程(如何检测)如下。
[0120]
i)选取标准iges模型的曲面(图6(a),(b),(c))。由于分割已经完成,根据映射关系可得标准iges模型曲面对应的点云簇(图7(b),(c),(d))。
[0121]
ii)使用最小二乘法拟合点云簇。对形位误差(形状误差。平面度、圆柱度,位置误差。平行度、垂直度)进行分析。
[0122]
分析具体过程如下。
[0123]
a)对平面度形状误差分析。拟合点云簇为平面f
v
,求解点云簇中的点到平面f
v
的距离并优化得到双向距离集合其中表示点到拟合平面f
v
的有向距离。则平面度flat:
[0124]
flat=max(dis)
‑
min(dis)
[0125]
其中,max(dis)为集合dis中的最大值,min(dis)为集合dis中的最小值。
[0126]
b)对圆柱度形状误差分析。拟合点云簇为圆柱面f
v
,求解点云簇中的点到圆柱面f
v
的距离并优化得到双向距离集合其中表示点到拟合圆柱面f
v
的有向距离。则圆柱度cyl。
[0127]
cyl=max(dis)
‑
min(dis)
[0128]
其中,max(dis)为集合dis中的最大值,min(dis)为集合dis中的最小值。
[0129]
c)对平行度位置误差分析。平行度误差包括线线平行度、线面平行度、面面平行度,经过工业ct重建后的点云模型边界是模糊的,故本文只考虑面面平行度误差。平行度误差的检测需要选定一个面为基准面f
s
,一个面为待测面f
k
,相较于平面度的测量,平行度分析中与待测面匹配的点集拟合的平面要与基准面保持平行,故在使用最小二乘法进行平面拟合时,增加约束条件拟合平面法向量n
v
与基准平面的法向量n
s
相等或反向。
[0130]
约束条件。
[0131]
n
s
==n
v or n
s
==
‑
nv
[0132]
由曲面f
k
获取对应的测量点集根据点集p
k
拟合辅助平面f
v
,设双向集合其中表示点到拟合平面f
v
的有向距离。则平行度误差para。
[0133]
para=max(dis)
‑
min(dis)
[0134]
其中,max(dis)为集合dis中的最大值,min(dis)为集合dis中的最小值。
[0135]
d)对垂直度位置误差进行分析。垂直度误差检测需要选取一个基准平面f
s
和一个待测平面f
k
,f
s
的法向量为n
s
,f
k
所对应的点集合集合p
k
拟合一个辅助平面f
v
且f
v
的法向量n
v
与n
s
垂直,计算集合p
k
中的点到f
v
的距离并优化得到双向距离集合
d
max
为dis中的最大正向距离,其对应的点为d
min
为dis中的最大负向距离,其对应的点为通过n
s
与构建辅助平面f
max
,通过n
s
与构建辅助平面f
min
,与两点的距离即为垂直度。则垂直度误差ver。
[0136][0137]
部分实验结果。
[0138]
参见图12,选取两模型如下所示的部分曲面进行形位误差分析。其中支座的曲面3和阀体的曲面1和4均为零件内部曲面,其余曲面为零件外部曲面。
[0139]
表圆柱度和平面度误差分析
[0140][0141]
选取图13所示的曲面,以红色曲面为基准面,绿色曲面为待测曲面。对支座进行垂直度误差分析,对120阀体进行平行度误差分析,误差分析结果见下表。
[0142]
表垂直度和平行度误差分析
[0143]
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1