一种基于层次状态机的多种文化活动空间变换方法
1.本发明涉及小型文化服务综合体多种文化活动空间组合变换与控制领域,特别涉及了一种基于层次状态机的多种文化活动空间变换方法。
背景技术:
2.随着时代的进步,农村文化活动的多样性、自组织性呈现出快速发展趋势,在基层文化建设的过程中必须注重加强公共文化服务体系建设,传播知识和文明、提升人民群众的文化品位、塑造现代公民品格,为基层文化建设提供有力文化支撑。通过对国内基层公共文化场馆情况的调查与初步分析,农村基层社区对综合文化的需求旺盛,现有分类配置的文化设施不能满足居民对综合文化需求的期望。小型文化服务综合体一体化发展的着力点是推行多功能活动空间建设,即:集成文化馆、美术馆、文化活动站、社区文化中心、公共电子阅览室、演出场馆(话剧、歌剧、音乐会等)、中小型会议舞会等功能,形成一体化的场馆服务载体,实现基层文化服务的新增长极,探索出一条满足我国新农村公共文化服务要求的新模式。
3.在农村建设小型文化服务综合体需要考虑到综合体建筑空间有限,要实现小型文化服务综合体可以举办多种活动,需要梳理农村常见活动的设备与空间需求,形成相关功能的设备配置,设计一些空间变换专用的装备或系统。如中国专利局2018年4月6日公开了一种名称为一种室内空间的变换方法及房屋空间变换结构的发明,其公开号为cn107882360a。该发明公开了一种室内空间的变换方法,该方法包括:首先在室内空间的中心设置可以旋转的隔墙,通过旋转隔墙可以得到更多数量的室内区域;然后,在侧墙设置活动家具以及结合智能控制系统,实现室内空间的功能变换。该发明还公开了一种室内空间的房屋空间变换结构。但该发明仅仅将室内空间快速分割,变换室内的功能,主要用于住宅生活,不适用于文化活动空间。对于小型文化服务综合体具有多种文化活动的性质,我们需要考虑实际使用过程中不同文化活动之间的变换的可行性与快速性,提出一种解决在有限时间内实现多种文化活动空间变换的可行性问题的方案。
技术实现要素:
4.本发明的目的是克服现有技术中的空间变换方法仅仅将室内空间快速分割,变换室内的功能,主要用于住宅生活,不适用于文化活动空间的问题,提供了一种基于层次状态机的多种文化活动空间变换方法,采用构建层次状态机模型的方式有效地将复杂的多种文化空间变换网络图简单化,并可视化表示多种文化空间的变换,在有限时间内实现多种文化活动空间变换的可行性。
5.为了实现上述目的,本发明采用以下技术方案:一种基于层次状态机的多种文化活动空间变换方法,其特征在于,它包括下列步骤:
6.s1:根据目前已有的综合体空间构建模式以及各种活动需求,分析并给出六种小型文化服务综合体活动空间设计方案;
7.s2:提取各活动空间设计方案特征分析,对小型文化服务综合体多种活动空间设计定义空间模式矩阵;
8.s3:创建决策树模型,对小型文化服务综合体多种活动空间进行分类;
9.s4:构建空间变换层次状态机模型;
10.s5:仿真验证上述步骤所得的空间变换层次状态机模型的可行性。
11.决策树模型是由决策点、策略点(事件点)及结果构成的树形图,一般应用于序列决策中,通常以最大收益期望值或最低期望成本作为决策准则,通过图解方式求解在不同条件下各类方案的效益值,然后通过比较,做出决策。不需要对数据有任何的先验假设,计算速度较快,结果容易解释,而且稳健性强。
12.层次状态机属于有限状态机的一种,通过层次状态机可以有效减少状态的数量,使状态之间有继承效果,能够对差异性编程提供很好的支持。因此可广泛应用在一些嵌入式系统中或资源稀缺的设备中。此外,运用层次状态机管理设备,还能够高效地利用已开发的逻辑实现逻辑复用,具有良好的可扩展性。当增加一个设备时,只需设计这个设备的运行状态和他们之间的切换关系并设计对应的状态机,在状态中处理这个状态下的物理设备通信消息,在状态机管理器中增加这个代理设备通过消息机制即可实现对这个设备的管理。这种统一的模型便于增加新的设备,是使系统具有了优良的可扩展性。
13.本发明通过梳理目前综合体空间构建模式和小型服务文化综合体多种文化活动类型,开展各类活动功能服务空间建设需求调研,并根据各类活动空间建设需求提出空间变换专用装备系统,给出常见的小型文化服务综合体空间设计方案;提取各活动空间设计方案特征分析,将专有装备系统的位置和状态进行数学定义并形成文化多活动空间模式矩阵;根据活动空间模式矩阵创建决策树模型对小型文化服务综合体多种活动空间进行分类;决策树分类结果作为层次状态划分依据构建层次状态机模型;通过仿真实验对层次状态机模型中的各个状态在层次内和层次外的变换进行验证,得出层次内变换简便于层次外变换,验证了基于层次状态机的多种文化活动空间变化方法可以应用于在有限时间内解决多种文化活动空间变换可行性问题。
14.作为优选,所述的步骤s1中,进一步表示为:
15.s1.1:梳理目前综合体空间构建模式和小型文化服务综合体多种文化活动类型,开展各类活动功能服务空间建设需求调研;
16.s1.2:根据各类活动空间建设需求提出空间变换专用装备系统,分析并给出演出功能、会议功能、展览功能、阅览功能、民俗活动功能和体育活动功能六种小型文化服务综合体活动空间设计方案。
17.所述的专用装备系统主要有伸缩看台系统、多功能移动隔离墙系统以及拼台、隔断、活动桌椅等。伸缩看台系统使用时呈阶梯状,回缩后呈匣状,场地利用率高;多功能移动隔离墙系统中移动墙体可在小型文化综合体中横向平行移动,可实现被分隔的两个活动空间体积大小的变化,移动墙体的两侧分别内置有自动爬升收藏舞台和书架。
18.作为优选,所述的步骤s2进一步表示为:
19.s2.1:提取各活动空间设计方案特征分析,为建立小型文化服务综合体活动空间模型,将专有装备系统的位置和状态进行数学定义;
20.s2.2:根据专有装备系统数学定义对小型文化服务综合体多种活动空间设计定义
空间模式矩阵。
21.将专有装备系统的位置和状态进行数学定义并由此定义空间模式矩阵,便于后续的步骤中决策树模型的创建。
22.作为优选,所述的步骤s3进一步表示为:
23.s3.1:设定移动隔离墙位置、伸缩看台位置、自动爬升舞台状态、翻转书架状态和拼台使用状态为主要空间变换动作;
24.s3.2:根据活动空间定义表中的空间模式矩阵提取主要空间变换动作的特征值,计算信息增益率确定根节点以及内部节点;
25.s3.3:画出多种活动空间的决策树模型,并得到分类结果。
26.有利于后续步骤中层次状态机模型的创建。
27.作为优选,所述的步骤s3.2中计算信息增益率确定根节点以及内部节点进一步表示为:
28.信息熵定义为:
[0029][0030]
其中,p
k
为当前样本集合p中第k类样本所占的比例;
[0031]
利用信息熵,可获得待分类的属性的信息增益为:
[0032][0033]
其中,v表示待分类的属性a有个v可能的取值,d
v
表示d中对于属性a取值是a
v
的样本;
[0034]
待分类的属性信息增益率为:
[0035][0036][0037]
从待分类的属性的信息增益率中可看出信息增益率表示了待分类对象的属性能够为分类系统带来的信息,信息越多则表示该待分类对象的属性越重要,由此选择根节点和子节点。
[0038]
作为优选,所述的步骤s4进一步包括:
[0039]
s4.1:利用层次状态机理论,将多种活动空间作为状态,根据决策树模型得到的分类结果将分到同一类的活动空间模型划在同一层状态内,以减少状态图的复杂性;
[0040]
s4.2:将各活动空间之间的相同空间变换动作作为触发条件;
[0041]
s4.3:构建空间变换层次状态机模型。
[0042]
以活动空间作为状态、各活动空间之间的相同空间变换动作作为触发条件构建空间变换层次状态机模型,有效地将复杂的多种文化空间变换网络图简单化,并可视化表示多种文化空间的变换,在有限时间内实现多种文化活动空间变换的可行性。
[0043]
作为优选,所述的步骤s5进一步包括:
[0044]
s5.1:对文化活动空间之间主要变换装备的位置移动进行仿真,得出层次状态机中各层次状态之间变换所需要的时间系数;
[0045]
s5.2:根据时间系数判断空间变换层次状态机模型的可行性。
[0046]
仿真验证上述步骤所得的空间变换层次状态机模型的可行性,需满足同一层状态内的活动空间状态之间的变换要比层外状态之间的变换更加快速与简便,实现解决小型文化服务综合体多种文化活动空间在有限时间内互相变换的可行性条件问题。
[0047]
作为优选,所述的步骤s5.1中的对文化活动空间之间主要变换装备的位置移动进行仿真为:采用人工势场法模拟机器人在运动空间任意位置的运动方向;采用动态窗口法预测移动机器人下一状态,实现局部避障功能。
[0048]
动态窗口法就是预测移动机器人下一状态实现局部避障功能。移动机器人下一状态受到当前状态自身机械特性的影响,分析并得出移动机器人下一状态的轨迹。实验过程中根据不同移动单位实际大小设定不用移动机器人尺寸、设定最大速度、最大加速度、转角幅度限制。
[0049]
作为优选,所述的采用人工势场法模拟机器人在运动空间任意位置的运动方向具体表现为:人工势场定义为:
[0050]
u=u
a
+u
r
[0051]
式中,目标点的引力场,障碍物的斥力场;
[0052]
人工势场对机器人的作用力f为:
[0053]
f=f
a
+f
r
[0054]
式中,f
a
目标点对机器人的引力,f
r
障碍物对机器人的斥力。
[0055]
人工势场法的基本原理将空间结构用一个称作人工势场的数值函数来描述,通过势场中的力引导机器人在环境中运动势场分为两种,目标点产生的引力场和障碍物产生的斥力场,两者叠加组成机器人运动的虚拟势场,目标点的引力场和障碍物的斥力场共同合成的总场强决定机器人在运动空间任意位置的运动方向。
[0056]
因此,本发明具有如下有益效果:根据数学定义,得到空间模式矩阵,构建出各种文化活动空间的数学模型;用决策树分类理论结合空间模式矩阵内的设备定义参数将多种文化活动空间进行有效分类;建立层次状态机模型,决策树分类后将活动空间划分为不同层的状态,活动空间之间的相同特征值作为状态切换的触发条件,以此给出一种基于层次状态机的多种文化活动变换方法,能够在有限时间内实现多种文化活动空间变换。
附图说明
[0057]
图1为本发明的具体操作流程图;
[0058]
图2为常规演出模式示意图;
[0059]
图3为t台演出模式示意图;
[0060]
图4为中心岛演出模式示意图;
[0061]
图5为报告会议模式示意图;
[0062]
图6为视频会议模式示意图;
[0063]
图7为小型报告会议模式示意图;
[0064]
图8为展览模式示意图;
[0065]
图9为阅览模式示意图;
[0066]
图10为节日聚餐模式示意图;
[0067]
图11为婚礼宴会模式示意图;
[0068]
图12为体育活动模式示意图;
[0069]
图13为决策树模型图;
[0070]
图14为层次状态机模型图;
[0071]
图15为空间变换过程流程图。
具体实施方式
[0072]
下面结合附图与具体实施方式对本发明作进一步详细描述:
[0073]
如图1所示的实施例中,可以看到一种基于层次状态机的多种文化活动空间变换方法,其操作流程为:步骤一,根据目前已有的综合体空间构建模式以及各种活动需求,分析并给出六种小型文化服务综合体活动空间设计方案;步骤二,提取各活动空间设计方案特征分析,对小型文化服务综合体多种活动空间设计定义空间模式矩阵;步骤三,创建决策树模型,对小型文化服务综合体多种活动空间进行分类;步骤四,构建空间变换层次状态机模型;步骤五,仿真验证上述步骤所得的空间变换层次状态机模型的可行性。
[0074]
下面继续通过具体的例子,进一步说明本发明的技术方案和技术效果。
[0075]
第一步:根据目前已有的综合体空间构建模式以及各种活动需求,分析并给出六种小型文化服务综合体活动空间设计方案
[0076]
梳理目前综合体空间构建模式和小型文化服务综合体多种文化活动类型,开展各类活动功能服务空间建设需求调研,并根据各类活动空间建设需求提出空间变换专用装备系统,专用装备系统主要有伸缩看台系统、多功能移动隔离墙系统以及拼台、隔断、活动桌椅等。多功能移动隔离墙系统中移动墙体可在小型文化服务综合体中横向平行移动,可实现被分隔的两个活动空间体积大小的变化,移动墙体的两侧分别内置有自动爬升收藏舞台和书架;伸缩看台系统使用时呈阶梯状,回缩后呈匣状,场地利用率高。文化活动需求调研结果结合变换专用装备系统给出演出功能、会议功能、展览功能、阅览功能、民俗活动功能和体育活动功能六种小型文化服务综合体活动空间设计方案,如图2~12:其中图2为常规演出模式示意图,图3为t台演出模式示意图,图4为中心岛演出模式示意图,图5为报告会议模式示意图,图6为视频会议模式示意图,图7为小型报告会议模式示意图,图8为展览模式示意图,图9为阅览模式示意图,图10为节日聚餐模式示意图,图11为婚礼宴会模式示意图,图12为体育活动模式示意图。
[0077]
第二步:提取各活动空间设计方案特征分析,对小型文化服务综合体多种活动空间设计定义空间模式矩阵
[0078]
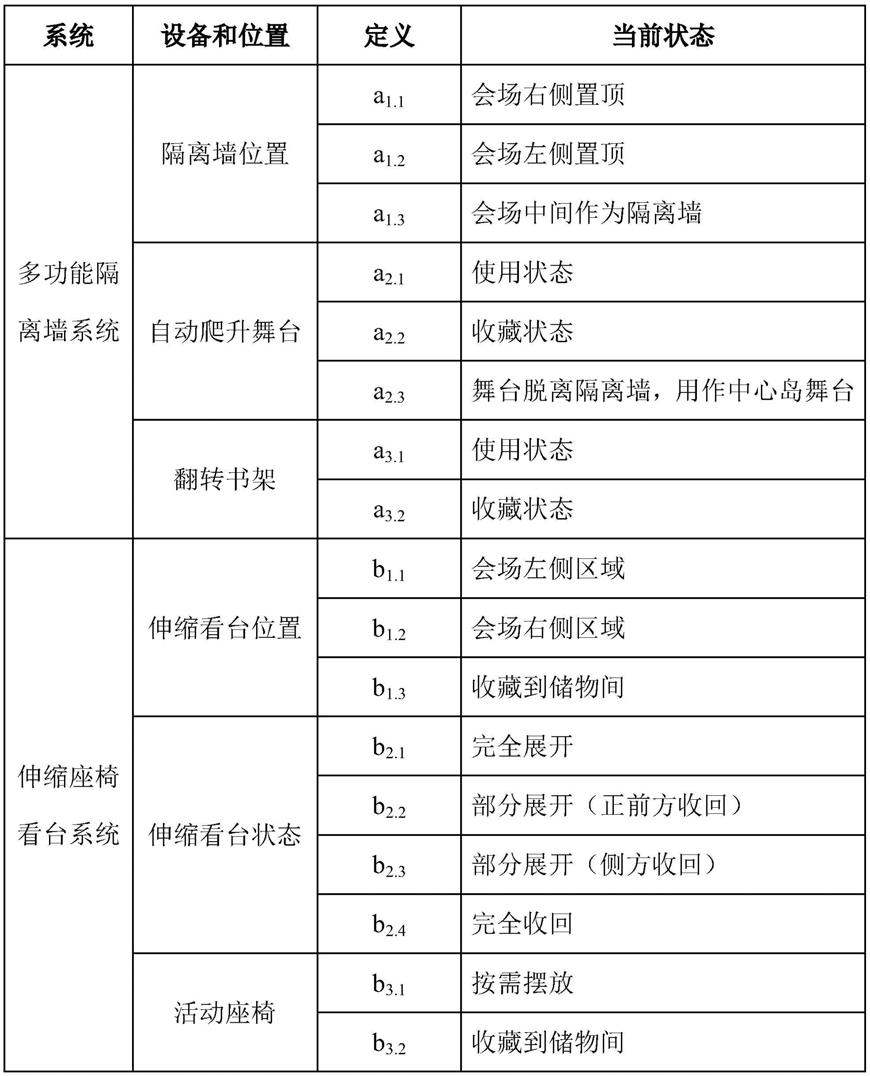
提取各活动空间设计方案特征分析,为建立小型文化服务综合体活动空间模型,将专有装备系统的位置和状态进行定义,结果如下:
[0079]
[0080][0081]
根据专有装备系统的位置和状态对小型文化服务综合体多种活动空间设计定义空间模式矩阵,结果如下:
[0082]
[0083][0084]
第三步:创建决策树模型,对小型文化综合体多种活动空间进行分类
[0085]
首先,确定移动隔离墙位置、伸缩看台位置、自动爬升舞台状态、翻转书架状态和拼台使用状态为主要空间变换动作;其次,根据活动空间定义表中的空间模式矩阵提取主要空间变换动作的特征值,计算信息增益率确定根节点以及子节点,信息熵定义为:
[0086][0087]
其中,p
k
为当前样本集合p中第k类样本所占的比例。
[0088]
若令v表示待分类的属性a有v个可能的取值,d
v
表示d中对于属性a取值是a
v
的样本,则利用信息熵,可获得待分类的属性的信息增益为:
[0089][0090]
待分类的属性信息增益率为:
[0091][0092][0093]
从待分类的属性的信息增益率中可看出信息增益率表示了待分类对象的属性能够为分类系统带来的信息,信息越多则表示该待分类对象的属性越重要,由此选择根节点
和子节点。
[0094]
最后画出多种活动空间的决策树模型,并得到分类结果。决策树模型如图13所示。
[0095]
第四步:构建空间变换层次状态机模型
[0096]
利用层次状态机理论,将多种活动空间作为状态,根据决策树模型得到的分类结果将分到同一类的活动空间模型划在同一层状态内,以减少状态图的复杂性,层次状态机模型如图14所示;将各活动空间之间的相同主要空间变换动作作为触发条件,触发条件如下:
[0097][0098][0099]
第五步:仿真验证上述步骤所得的空间变换层次状态机模型的可行性
[0100]
通过仿真实验模拟空间变换过程,优选为matlab进行仿真。主要是针对文化活动空间之间主要变换装备的位置移动进行仿真,得出层次状态机中各层次状态之间变换所需要的时间系数。实验内容为多个移动单位在已知环境下进行路径规划,要求寻找较优路径、
避免与障碍物和其他移动单位碰撞。分析实际环境情况,已知环境中障碍物较少,主要是避免移动单位之间的碰撞,选用人工势场法和动态窗口法完成仿真实验。
[0101]
人工势场法其基本原理将空间结构用一个称作人工势场的数值函数来描述,通过势场中的力引导机器人在环境中运动势场分为两种,目标点产生的引力场和障碍物产生的斥力场,两者叠加组成机器人运动的虚拟势场,目标点的引力场和障碍物的斥力场共同合成的总场强决定机器人在运动空间任意位置的运动方向。因此,人工势场定义为:
[0102]
u=u
a
+u
r
[0103]
式中,u
a
目标点的引力场,u
r
障碍物的斥力场。定义引力和斥力分别为引力场和斥力场的负梯度,则根据空间动力学方程和拉格朗日方程,可推导出人工势场对机器人的作用力f为:
[0104]
f=f
a
+f
r
[0105]
式中,f
a
目标点对机器人的引力,f
r
障碍物对机器人的斥力。该力决定了移动机器人的运动。
[0106]
动态窗口法就是预测移动机器人下一状态实现局部避障功能。移动机器人下一状态受到当前状态自身机械特性的影响,分析并得出移动机器人下一状态的轨迹。实验过程中根据不同移动单位实际大小设定不用移动机器人尺寸、设定最大速度、最大加速度、转角幅度限制。
[0107]
结合实际活动空间变换过程,画出空间变换过程流程图,如图15,空间变换过程如下:
[0108]
s1:判断隔离墙是否移动,是的话进入s2,否的话进入s3;
[0109]
s2:判断爬升舞台和书架是否已收藏,是的话进入s4,否的话收藏爬升舞台和书架后进入s4;
[0110]
s3:判断爬升舞台或书架是否改变状态,是的话进入s4,否的话改变爬升舞台或书架状态后进入s4;
[0111]
s4:移动隔离墙至指定位置,判断伸缩看台以及拼台是否移动,若需要,则移动伸缩看台或者拼台至指定位置,若不需要则摆放目标空间所需的隔断、桌椅等。
[0112]
根据空间变换过程流程和层次状态机模型设计出多文化活动空间之间的变换仿真实验,并得到实验结果如下:
[0113][0114]
通过实验结果可得层次内的活动空间变换小于层次外活动空间变换,则说明采用层次状态机构建的空间变换模型具有合理性,实现来解决小型文化服务综合体多种文化活动空间在有限时间内互相变换的可行性条件问题。
[0115]
以上所述的实施例只是本发明的一种较佳的方案,并非对本发明作任何形式上的限制,在不超出权利要求所记载的技术方案的前提下还有其它的变体及改型。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1