基于低质量数据的ARMA模型参数估计方法及系统
基于低质量数据的arma模型参数估计方法及系统
技术领域
1.本发明属于时间序列arma(自回归滑动平均)模型技术领域,具体说是一种基于低质量数据的arma模型参数估计方法及系统。
背景技术:
2.arma模型是一种重要的时间序列分析模型,能够用来描述实际应用中的许多问题,在金融、气象水文、海洋学、信号处理等领域都有着广泛的应用。因此,基于arma模型系统的相关理论和方法受到了大量关注,目前这些方法的基本思路常常被归结为,把arma模型看作一个线性回归模型,并利用获得的观测数据实现对该模型参数的准确估计,从而建立准确的arma模型,用来拟合实际的系统。值得注意的是,在实际应用中,环境干扰或观测条件等因素可能会导致arma模型系统输出的部分观测数据丢失或者观测数据明显异常的情况(以下将这些丢失的输出数据和异常数据统称为丢失数据)。由于arma模型可以等价为一个线性回归模型,因此arma模型部分输出的观测数据的丢失等价于线性回归模型输入矢量信号的丢失,从而导致无法有效地实现模型参数的估计。
技术实现要素:
3.针对上述问题,本发明提供了一种基于低质量数据的arma模型参数估计方法及系统。
4.本发明采取如下技术方案:
5.一种基于低质量数据的arma模型参数估计方法,包括以下步骤:
6.步骤1:收集采样数据,建立信号模型;
7.步骤2:初始化模型中所需的参数;
8.步骤3:计算丢失数据的期望;
9.步骤4:计算对数似然函数的期望;
10.步骤5:更新参数;
11.步骤6:判断是否满足迭代次数,若不满足,则执行步骤3;若满足,则结束。
12.优选的,步骤1具体如下:假设一个平稳随机过程arma模型,其输入和输出具有如下形式:其中a0=1,a1,a2,
…
,a
l
为自回归模型(ar)的系数,b1,b2,
…
,b
q
为滑动平均模型(ma)的系数,ar部分和ma 部分的系数为待估计的参数,u
k,i
为系统的输入,v
k
为高斯白噪声,服从均值为 0、方差为σ2的高斯分布,即v
k
~n(0,σ2)。将ar部分和ma部分的系数用向量a和b表示,输入项用向量u
k
表示,模型反馈项用表示,因此信号模型改写为:
13.本发明中对arma模型的参数估计,考虑了在实际的情况下,环境干扰或观测条件等因素可能会导致arma模型系统输出的部分观测数据丢失或者观测数据明显异常的情况。
给定n个输入信号集合u={u1,u2,
…
,u
n
},那么根据信号模型,相应的输出测量集合为y
n
={y1,y2,
…
,y
n
}。假设的输出测量集合y
n
中,部分测量数据是丢失的,也就是说集合y
n
可以分为2个子集合,即y
n
={y
m
,y
o
},其中y
m
为丢失的输出数据,y
o
为可观测的输出数据;集合o={o1,o2,
…
,o
a
}和集合m={m1,m2,
…
,m
b
}分别表示可观测数据和丢失数据的时间索引,即k∈o时, y
k
是可观测的,而k∈m时,y
k
是丢失的数据。本发明所提供的方法是利用系统的输入u和可观测的输出y
o
来实现对模型参数{a1,a2,
…
,a
l
,b1,b2,
…
,b
q
}的估计。
14.优选的,步骤2具体如下:初始化:设置待估计参数的初始值a,b,初始值设置为0。
15.优选的,步骤3具体如下:计算丢失数据的期望:利用统计的方法获得丢失数据的数学期望,用来替代丢失数据。
16.优选的,步骤4具体如下:em算法中的e步:利用步骤1中的信号模型可以得到d
o
和y
m
的联合概率密度p(d
o
,y
m
|θ),其中d
o
={u,y
o
}。之后再进一步求解其中θ
(i)
={a
(i)
,b
(i)
}。e步表示根据当前θ
(i)
的值和d
o
值对应的y
m
的条件概率密度计算对数似然函数 logp(d
o
,y
m
|θ)的期望。
17.优选的,步骤5具体如下:em算法中的m步:最大化步骤4得到的函数θ(θ|θ
(i)
),求解参数θ
(i)
={a
(i)
,b
(i)
}。
18.优选的,步骤6具体如下:停止迭代的条件:当满足迭代次数后停止循环,否则重新执行步骤3、步骤4和步骤5,直到满足迭代次数。
19.本发明还公开了一种基于低质量数据的arma模型参数估计系统,其包括以下模块:
20.数据收集及信号模型建立模块,收集采样数据,建立信号模型;
21.初始化模块,初始化模型中所需的参数;
22.丢失数据期望计算模块,计算丢失数据的期望;
23.对数似然函数期望计算模块,计算对数似然函数的期望;
24.更新参数模块,更新参数;
25.迭代次数判断模块,判断是否满足迭代次数。
26.优选的,数据收集及信号模型建立模块具体如下:假设一个平稳随机过程arma模型,其输入和输出具有如下形式:其中a0=1, a1,a2,
…
,a
l
为自回归模型(ar)的系数,b1,b2,
…
,b
q
为滑动平均模型(ma) 的系数,ar部分和ma部分的系数为待估计的参数,u
k,i
为系统的输入,v
k
为高斯白噪声,服从均值为0、方差为σ2的高斯分布,即v
k
~n(0,σ2);将ar部分和ma部分的系数用向量a和b表示,输入项用向量u
k
表示,模型反馈项用表示,因此信号模型改写为:
27.给定n个输入信号集合u={u1,u2,
…
,u
n
},根据信号模型,相应的输出测量集合为y
n
={y1,y2,
…
,y
n
};假设的输出测量集合y
n
中,部分测量数据是丢失的,即集合y
n
可分为2个子集合,即y
n
={y
m
,y
o
},其中y
m
为丢失的输出数据, y
o
为可观测的输出数据;集合o={o1,o2,
…
,o
a
}和集合m={m1,m2,
…
,m
b
}分别表示可观测数据和丢失数据的时间索引,即k∈o时,y
k
是可观测的,而k∈m时, y
k
是丢失的数据。
28.优选的,初始化模块具体如下:设置待估计参数的初始值a,b,初始值设置为0。
29.优选的,丢失数据期望计算模块具体如下:利用统计方法获得丢失数据的数学期望,用来替代丢失数据。
30.优选的,更新参数模块具体如下:利用数据收集及信号建立模块中的信号模型得到d
o
和y
m
的联合概率密度p(d
o
,y
m
|θ),其中d
o
={u,y
o
};之后再进一步求解其中θ
(i)
={a
(i)
,b
(i)
};e步表示根据当前θ
(i)
的值和d
o
值对应的y
m
的条件概率密度计算对数似然函数 logp(d
o
,y
m
|θ)的期望。
31.优选的,更新参数模块具体如下:最大化对数似然函数期望计算模块得到的函数θ(θ|θ
(i)
),从而求解参数θ
(i)
={a
(i)
,b
(i)
}。本发明针对arma模型的观测数据可能是低质量的(如数据部分丢失、观测数据明显异常等),从而导致对 arma模型的参数估计不准确的情况,提出了一种基于期望最大化的arma模型参数估计的循环迭代法。本发明所提出的技术方案是利用统计的方法获得低质量数据的数学期望,进而结合线性回归和最大似然方法推导出arma模型的参数估计,从而实现对arma模型参数的估计,该技术方案有着较好地估计性能和收敛性。
32.本发明具有如下有益效果:
33.1.本发明考虑了arma模型中输出数据丢失的情况,使得其能应用在更广泛的领域。
34.2.本发明使用期望最大化方法进行参数的估计,所提供的技术方案在收敛速度和估计的准确性方面均有优异的表现。
附图说明
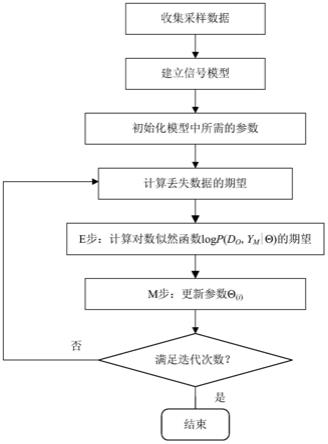
35.图1为本发明基于低质量数据的arma模型参数估计方法的具体流程图。
36.图2为本发明基于低质量数据的arma模型参数估计系统的功能框图。
具体实施方式
37.为了便于本领域普通技术人员理解和实施本发明,下面结合附图及实施例对本发明作进一步的详细描述,应当理解,此处所描述的实施例仅用于说明和解释本发明,但并不用于限定本发明。
38.在实际应用中,环境干扰或观测条件等因素可能会导致arma模型系统输出的部分观测数据丢失的情况。由于arma模型可以等价为一个线性回归模型,因此arma模型部分输出的观测数据的丢失等价于线性回归模型输入矢量信号的丢失,从而导致无法有效实现模型参数的估计。针对这个问题,本发明提出了一种基于期望最大化的arma模型参数估计方案。该方案利用可观测的数据计算出丢失数据的数学期望,进而结合线性回归和最大似然方法推导出arma 模型的参数估计。
39.详见图1:本发明优选实施例一种基于低质量数据的arma模型参数估计方法,步骤如下:
40.步骤1:建立信号模型:假设一个平稳随机过程arma模型,其输入和输出具有如下
形式:其中a0=1,a1,a2,
…
,a
l
为自回归模型 (ar)的系数,b1,b2,
…
,b
q
为滑动平均模型(ma)的系数,ar部分和ma 部分的系数为待估计的参数,u
k,i
为系统的输入,v
k
为高斯白噪声,服从均值为 0、方差为σ2的高斯分布,即v
k
~n(0,σ2)。将ar部分和ma部分的系数用向量a和b表示,输入项用向量u
k
表示,模型反馈项用表示,因此信号模型改写为:
41.本发明中对arma模型的参数估计,考虑了在实际的情况下,环境干扰或观测条件等因素可能会导致arma模型系统输出的部分观测数据丢失或者观测数据明显异常的情况。给定n个输入信号集合u={u1,u2,
…
,u
n
},那么根据信号模型,相应的输出测量集合为y
n
={y1,y2,
…
,y
n
}。本发明假设的输出测量集合y
n
中,部分测量数据是丢失的,也就是说集合y
n
可以分为2个子集合,即y
n
={y
m
,y
o
},其中y
m
为丢失的输出数据,y
o
为可观测的输出数据;集合o= {o1,o2,
…
,o
a
}和集合m={m1,m2,
…
,m
b
}分别表示可观测数据和丢失数据的时间索引,即k∈o时,y
k
是可观测的,而k∈m时,y
k
是丢失的数据。本发明所提供的方法是利用系统的输入u和可观测的输出y
o
来实现对模型参数{a1,a2,
…
,a
l
, b1,b2,
…
,b
q
}的估计。
42.步骤2:初始化:设置待估计参数的初始值a,b,初始值设置为0。
43.步骤3:计算丢失数据的期望:利用统计的方法获得丢失数据的数学期望,用来替代丢失数据。
44.步骤4:em算法中的e步:利用步骤1中的信号模型可以得到d
o
和y
m
的联合概率密度p(d
o
,y
m
|θ),其中d
o
={u,y
o
}。之后再进一步求解其中θ
(i)
={a
(i)
,b
(i)
}。e步表示根据当前θ
(i)
的值和d
o
值对应的y
m
的条件概率密度计算对数似然函数logp(d
o
,y
m
|θ)的期望。
45.步骤5:em算法中的m步:最大化步骤4得到的函数θ(θ|θ
(i)
),求解参数θ
(i)
={a
(i)
,b
(i)
}。
46.步骤6:停止迭代的条件:当满足迭代次数后停止循环,否则重新执行步骤3、步骤4和步骤5,直到满足迭代次数。
47.如图2所示,基于低质量数据的arma模型参数估计系统,包括以下模块:
48.数据收集及信号模型建立模块:假设一个平稳随机过程arma模型,其输入和输出具有如下形式:其中a0=1,a1,a2,
…
,a
l
为自回归模型(ar)的系数,b1,b2,
…
,b
q
为滑动平均模型(ma)的系数,ar部分和 ma部分的系数为待估计的参数,u
k,i
为系统的输入,v
k
为高斯白噪声,服从均值为0、方差为σ2的高斯分布,即v
k
~n(0,σ2);将ar部分和ma部分的系数用向量a和b表示,输入项用向量u
k
表示,模型反馈项用表示,因此信号模型改写为:
49.给定n个输入信号集合u={u1,u2,
…
,u
n
},根据信号模型,相应的输出测量集合为y
n
={y1,y2,
…
,y
n
};假设的输出测量集合y
n
中,部分测量数据是丢失的,即集合y
n
可分为2个子集合,即y
n
={y
m
,y
o
},其中y
m
为丢失的输出数据,y
o
为可观测的输出数据;集合o={o1,
o2,
…
,o
a
}和集合m={m1,m2,
…
,m
b
}分别表示可观测数据和丢失数据的时间索引,即k∈o时,y
k
是可观测的,而k∈m时, y
k
是丢失的数据。
50.初始化模块:设置待估计参数的初始值a,b,初始值设置为0。
51.丢失数据期望计算模块:利用统计方法获得丢失数据的数学期望,用来替代丢失数据。
52.更新参数模块:利用数据收集及信号建立模块中的信号模型得到d
o
和y
m
的联合概率密度p(d
o
,y
m
|θ),其中d
o
={u,y
o
};进一步求解其中θ
(i)
={a
(i)
,b
(i)
};e步表示根据当前θ
(i)
的值和d
o
值对应的y
m
的条件概率密度计算对数似然函数logp(d
o
,y
m
|θ)的期望。
53.更新参数模块:最大化更新参数模块得到的函数θ(θ|θ
(i)
),从而求解参数θ
(i)
={a
(i)
,b
(i)
}。迭代次数判断模块,判断是否满足迭代次数。当满足迭代次数后停止循环,否则重新执行丢失数据期望计算模块、对数似然函数期望计算模块和更新参数模块,直到满足迭代次数。
54.本发明考虑到实际应用中输出数据可能会出现丢失的情况,针对这种情况提出了基于低质量数据的arma模型参数估计方案。该方案利用统计方法获得丢失数据的数学期望,用来替代丢失数据的真实值,然后利用em算法通过两步循环迭代求解参数向量a,b。这种方案在收敛速度和估计的准确性方面均有着不错的表现。
55.本发明针对arma模型的观测数据可能是低质量的(如数据部分丢失、观测数据明显异常等),从而导致对arma模型的参数估计不准确的情况,提出了一种基于期望最大化的arma模型参数估计的循环迭代法。本发明所提出的方法是利用统计的方法获得低质量数据的数学期望,进而结合线性回归和最大似然方法推导出arma模型的参数估计,从而实现对arma模型参数的估计,该方法有着较好的估计性能和收敛性。
56.应当理解的是,上述针对较佳实施例的描述较为详细,并不能因此而认为是对本发明专利保护范围的限制,本领域的普通技术人员在本发明的启示下,在不脱离本发明权利要求所保护的范围情况下,而做出替换或变形,均落入本发明的保护范围之内,本发明的请求保护范围应以所附权利要求为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1