一种摄像头边缘计算方法及装置与流程
1.本发明涉及车辆身份识别技术领域,更具体地,涉及一种摄像头边缘计算方法及装置。
背景技术:
2.车辆号牌是车辆的“身份证”,有些人为了达到自己的一己私利,在车辆上安装“假牌”或“套牌”,其违法行为严重扰乱了车辆号牌管理秩序和道路交通通行秩序。
3.目前解决假牌和套牌的问题有如下常规方法,但都存在局限性。方法一、单纯靠图像识别技术进行识别,例如可以通过车牌号与车型、车身颜色的对应关系进行假牌和套牌识别,但无法识别出同款车型套牌现象;方法二、基于图像识别和基于射频识别的双基识别方法,即利用图像识别的车牌号与利用射频识别到的电子标签车牌信息进行一致性对比实现真伪识别,方法二具有先进性,但由于目前使用的射频识别技术本身,所用天线的辐射特性,造成射频识别的区域固定,在复杂路况场景下,比如由于拥堵、跟车或加塞造成在识别区域有多辆车存在,会造成电子标签信息与图像识别信息不同车,从而造成误判。
4.因此,如何克服上述技术方案的局限性,高效、准确地识别车辆号牌的真伪是亟待解决的技术问题之一。
技术实现要素:
5.本发明技术方案提供一种摄像头边缘计算方法及装置,以解决如何基于车辆图像定位对车辆身份真伪进行准确识别的问题。
6.为了解决上述问题,本发明提供了一种摄像头边缘计算方法,所述方法包括:
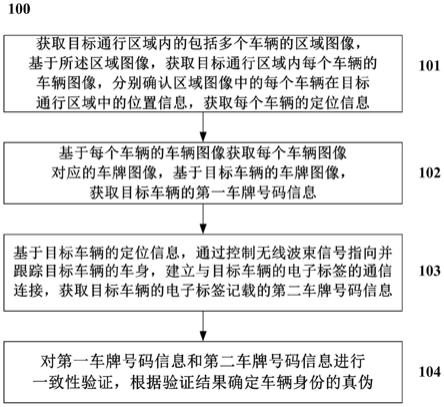
7.获取目标通行区域内的包括多个车辆的区域图像,基于所述区域图像,获取目标通行区域内每个车辆的车辆图像,分别确认区域图像中的每个车辆在所述目标通行区域中的位置信息,获取每个车辆的定位信息;
8.基于每个车辆的车辆图像获取每个车辆图像对应的车牌图像,基于目标车辆的所述车牌图像,获取目标车辆的第一车牌号码信息;
9.基于目标车辆的定位信息,通过控制无线波束信号指向并跟踪所述目标车辆的车身,建立与目标车辆的电子标签的通信连接,获取目标车辆的电子标签记载的第二车牌号码信息;
10.对所述第一车牌号码信息和所述第二车牌号码信息进行一致性验证,根据验证结果确定车辆身份的真伪。
11.优选地,通过单一摄像头或摄像头矩阵获取目标通行区域内的包括多个车辆的区域图像。
12.优选地,所述分别确认区域图像中的每个车辆在所述目标通行区域中的位置信息,包括:
13.获取区域图像的区域像素特征以及位置参数;
14.获取目标通行区域内每个车辆的车辆图像的像素特征;
15.根据每个车辆的车辆图像的像素特征与所述区域图像的区域像素特征的对应关系,确定每个车辆的车辆图像的位置参数,获取每个车辆的车辆图像在在所述目标通行区域中的位置信息。
16.优选地,所述通过控制无线波束信号指向并跟踪所述目标车辆的车身,还包括:
17.通过相控阵天线模块的多个天线单元合成初始无线波束信号;
18.通过移相器阵列的多个数字移相器改变与每个数字移相器相连接的天线单元信号相位,完成无线波束信号的合成,并基于目标车辆的定位信息控制合成后的无线波束信号的指向;
19.通过射频信号处理模块对合成后的无线波束信号进行处理,包括:增益控制、数据调制以及数据解调;并将经过处理后的数字的无线波束信号转换为模拟的无线波束信号。
20.优选地,所述相控阵天线模块包括天线阵列,对无线波束信号指向的调节范围为:纵向10米至30米以及横向12米内。
21.优选地,还包括:
22.对目标车辆的定位信息、时间信息、车辆图像、车牌图像、车牌号码信息进行存储;
23.对目标车辆的定位信息、时间信息、车牌号码信息进行查询。
24.优选地,还包括:所述目标车辆为多个车辆;
25.指向不同目标车辆的无线波束信号与电子标签的多个通信连接的通信信道频率不同。
26.基于本发明的另一方面,本发明提供一种摄像头边缘计算装置,所述装置包括:
27.初始单元,用于获取目标通行区域内的包括多个车辆的区域图像,基于所述区域图像,获取目标通行区域内每个车辆的车辆图像,分别确认区域图像中的每个车辆在所述目标通行区域中的位置信息,获取每个车辆的定位信息;
28.第一获取单元,用于基于每个车辆的车辆图像获取每个车辆图像对应的车牌图像,基于目标车辆的所述车牌图像,获取目标车辆的第一车牌号码信息;
29.第二获取单元,用于基于目标车辆的定位信息,通过控制无线波束信号指向并跟踪所述目标车辆的车身,建立与目标车辆的电子标签的通信连接,获取目标车辆的电子标签记载的第二车牌号码信息;
30.结果单元,用于对所述第一车牌号码信息和所述第二车牌号码信息进行一致性验证,根据验证结果确定车辆身份的真伪。
31.优选地,所述初始单元还用于,通过单一摄像头或摄像头矩阵获取目标通行区域内的包括多个车辆的区域图像。
32.优选地,所述初始单元用于,分别确认区域图像中的每个车辆在所述目标通行区域中的位置信息,还用于:
33.获取区域图像的区域像素特征以及位置参数;
34.获取目标通行区域内每个车辆的车辆图像的像素特征;
35.根据每个车辆的车辆图像的像素特征与所述区域图像的区域像素特征的对应关系,确定每个车辆的车辆图像的位置参数,获取每个车辆的车辆图像在在所述目标通行区域中的位置信息。
36.优选地,所述第二获取单元用于,通过控制无线波束信号指向并跟踪所述目标车辆的车身,还用于:
37.通过相控阵天线模块的多个天线单元合成初始无线波束信号;
38.通过移相器阵列的多个数字移相器改变与每个数字移相器相连接的天线单元信号相位,完成无线波束信号的合成,并基于目标车辆的定位信息控制合成后的无线波束信号的指向;
39.通过射频信号处理模块对合成后的无线波束信号进行处理,包括:增益控制、数据调制以及数据解调;并将经过处理后的数字的无线波束信号转换为模拟的无线波束信号。
40.优选地,所述相控阵天线模块包括天线阵列,对无线波束信号指向的调节范围为:纵向10米至30米以及横向12米内。
41.优选地,还包括检索单元,用于:
42.对目标车辆的定位信息、时间信息、车辆图像、车牌图像、车牌号码信息进行存储;
43.对目标车辆的定位信息、时间信息、车牌号码信息进行查询。
44.优选地,还包括:所述目标车辆为多个车辆;
45.指向不同目标车辆的无线波束信号与电子标签的多个通信连接的通信信道频率不同。
46.本发明技术方案提供一种摄像头边缘计算方法及装置,其中方法包括:获取目标通行区域内的包括多个车辆的区域图像,获取目标通行区域内每个车辆的车辆图像,分别确认区域图像中的每个车辆在目标通行区域中的位置信息,获取每个车辆的定位信息;基于每个车辆的车辆图像获取每个车辆图像对应的车牌图像,基于目标车辆的车牌图像,获取目标车辆的第一车牌号码信息;基于目标车辆的定位信息,通过控制无线波束信号指向并跟踪目标车辆的车身,建立与目标车辆的电子标签的通信连接,获取目标车辆的电子标签记载的第二车牌号码信息;对第一车牌号码信息和第二车牌号码信息进行一致性验证,根据验证结果确定车辆身份的真伪。本发明技术方案通过对同一车辆号牌信息与电子标签车牌信息的对比验证,实现复杂路况下多车辆车牌真伪的快速、准确识别。
附图说明
47.通过参考下面的附图,可以更为完整地理解本发明的示例性实施方式:
48.图1为根据本发明优选实施方式的一种摄像头边缘计算方法流程图;
49.图2为根据本发明优选实施方式的车辆识别方法的流程示意图;
50.图3为根据本发明优选实施方式的一种摄像头边缘计算装置基本组成框图;
51.图4为根据本发明优选实施方式的第一模块的功能组成框图;
52.图5为根据本发明优选实施方式的第二模块的功能组成框图;
53.图6为根据本发明优选实施方式的第三模块的功能组成框图;以及
54.图7为根据本发明优选实施方式的一种摄像头边缘计算装置结构图。
具体实施方式
55.现在参考附图介绍本发明的示例性实施方式,然而,本发明可以用许多不同的形式来实施,并且不局限于此处描述的实施例,提供这些实施例是为了详尽地且完全地公开
本发明,并且向所属技术领域的技术人员充分传达本发明的范围。对于表示在附图中的示例性实施方式中的术语并不是对本发明的限定。在附图中,相同的单元/元件使用相同的附图标记。
56.除非另有说明,此处使用的术语(包括科技术语)对所属技术领域的技术人员具有通常的理解含义。另外,可以理解的是,以通常使用的词典限定的术语,应当被理解为与其相关领域的语境具有一致的含义,而不应该被理解为理想化的或过于正式的意义。
57.图1为根据本发明优选实施方式的一种摄像头边缘计算方法流程图。本发明采用如下方法进行车辆号牌真伪的辨识,包括获取通行区域内的图像,根据图像,获取区域内所有待识别车辆图像及各车辆在区域中的位置信息,确定设置于待识别车辆车身上的车辆号牌,并通过图像识别技术获取车辆的号牌信息。
58.基于射频识别技术,根据待识别车辆在区域中的位置,控制无线波束指向并跟踪待识别车辆车身范围,向设置于待识别车辆车身上的电子标签发送上行链路频率信息,并建立起通信连接。然后向电子标签发送车牌号查询指令,并接收电子标签返回的电子标签车牌信息。其中电子标签为设置于待识别车辆车身上的车辆身份标识。其中的无线波束可能有多个,与被跟踪的待识别车辆具有唯一对应关系,采用并行通信工作方式,相邻无线波束的下行频率不同。
59.根据获取到的电子标签返回的车牌信息与经图像识别获取的车辆号牌信息,通过对信息的一致性对比验证,实现对待识别车辆车身号牌真伪性的辨识。
60.如图1所示,本发明提供一种摄像头边缘计算方法,方法包括:
61.步骤101:获取目标通行区域内的包括多个车辆的区域图像,基于所述区域图像,获取目标通行区域内每个车辆的车辆图像,分别确认区域图像中的每个车辆在目标通行区域中的位置信息,获取每个车辆的定位信息;优选地,通过单一摄像头或摄像头矩阵获取目标通行区域内的包括多个车辆的区域图像。
62.优选地,分别确认区域图像中的每个车辆在目标通行区域中的位置信息,包括:
63.获取区域图像的区域像素特征以及位置参数;
64.获取目标通行区域内每个车辆的车辆图像的像素特征;
65.根据每个车辆的车辆图像的像素特征与区域图像的区域像素特征的对应关系,确定每个车辆的车辆图像的位置参数,获取每个车辆的车辆图像在在目标通行区域中的位置信息。
66.本发明获取通行区域内的图像。具体实施时,用于获取通行区域图像的传感器可以采用单一摄像头或摄像头矩阵,使得图像识别区域完整覆盖待识别车辆通行区域;此功能与图3中图像采集模块功能相对应,在电路实现上采用900万像素全局曝光cmos图像传感器。
67.本发明根据区域内的图像,获取区域内所有待识别车辆图像及各车辆在区域中的位置信息。
68.本发明根据车辆图像,获取车辆号牌图像。如图4所示,其中的第一图像处理模块用于实现车辆图像的识别;其中的第四图像处理模块用于实现车辆位置的识别;其中的第二图像处理模块用于实现号牌图像的识别;其中的第三图像处理模块用于实现车辆号牌信息的识别。
69.本发明的车辆位置的识别是基于预先测算的图像像素位置参数,并根据车辆车身图像所对应的像素区域实现车辆图像定位的。
70.步骤102:基于每个车辆的车辆图像获取每个车辆图像对应的车牌图像,基于目标车辆的车牌图像,获取目标车辆的第一车牌号码信息;
71.本发明根据车辆号牌图像,识别出车辆号牌信息。
72.本发明中,获取车辆图像及各车辆在区域中的位置信息、获取车牌号牌图像、识别出车辆号牌信息由图3中的第一处理模块完成,第一处理模块采用dsp(digital signal processor,数字信号处理器)为主处理器,利用模式识别算法实现车辆图像、车辆位置信息、号牌图像与车辆号牌信息的识别。
73.步骤103:基于目标车辆的定位信息,通过控制无线波束信号指向并跟踪目标车辆的车身,建立与目标车辆的电子标签的通信连接,获取目标车辆的电子标签记载的第二车牌号码信息;
74.优选地,通过控制无线波束信号指向并跟踪目标车辆的车身,还包括:
75.通过相控阵天线模块的多个天线单元合成初始无线波束信号;
76.通过移相器阵列的多个数字移相器改变与每个数字移相器相连接的天线单元信号相位,完成无线波束信号的合成,并基于目标车辆的定位信息控制合成后的无线波束信号的指向;
77.通过射频信号处理模块对合成后的无线波束信号进行处理,包括:增益控制、数据调制以及数据解调;并将经过处理后的数字的无线波束信号转换为模拟的无线波束信号。
78.优选地,相控阵天线模块包括天线阵列,对无线波束信号指向的调节范围为:纵向10米至30米以及横向12米内。
79.本发明基于射频识别技术,根据待识别车辆在区域中的位置,控制无线波束指向并跟踪待识别车辆车身范围。该步骤功能由图3中的第二处理模块,相控阵天线模块、移相器阵列及射频信号处理模块协同完成。其中的第二处理模块使用fpga(field
‑
programmable gate array,现场可编程逻辑门阵列)作为主处理器,具体实现上可以划分为4个功能单元,如图5所示,分别为波束合成与扫描控制单元、基带数据处理单元、电子标签信息识别单元和车辆号牌真伪辨识单元。移相参数矩阵是控制天线指向的基础参数描述,与相控阵天线模块中的天线阵子数量及空间排布、射频信号处理模块的性能参数相关,经过前期的仿真确定,并与设备的实际安装高度、角度相关。移相参数矩阵中,存储了所有无线波束指向所对应的天线阵子的信号相位值及射频处理模块中相关射频处理电路的增益、载波频率等参数的控制与调节。图5中的波束合成与扫描控制单元用于根据移相参数完成移相器阵列与射频信号处理单元的控制。
80.本发明向设置于待识别车辆车身上的电子标签发送上行链路频率信息,并建立起通信连接。本发明向电子标签发送车牌号查询指令,并接收电子标签返回的电子标签车牌信息,这两个步骤功能实现与图5中的基带数据处理单元及电子标签信息识别单元相对应。
81.基带数据处理处理单元与图3中的射频信号处理模块相连,用于完成通信数据的编码、解码及相关数据的加解密工作。电子标签信息识别单元用于根据实际的通讯协议实现电子标签中电子车牌信息的获取。
82.在发明中,相控阵天线模块采用天线阵列,可实现纵向10~30米范围,横向12米范
围内的波束指向连续调节。
83.在本发明中,射频信号处理模块具备三套射频收发处理电路,可以实现三波束无线通信的并行处理。
84.步骤104:对第一车牌号码信息和第二车牌号码信息进行一致性验证,根据验证结果确定车辆身份的真伪。
85.本发明根据获取到的电子标签返回的车牌信息与经图像识别获取的车辆号牌信息,通过对信息的一致性对比验证,实现对待识别车辆车身号牌真伪性的辨识,该功能实现由第二处理模块中的车辆号牌真伪辨识单元完成。
86.优选地,还包括:
87.对目标车辆的定位信息、时间信息、车辆图像、车牌图像、车牌号码信息进行存储;
88.对目标车辆的定位信息、时间信息、车牌号码信息进行查询。
89.优选地,还包括:目标车辆为多个车辆;
90.指向不同目标车辆的无线波束信号与电子标签的多个通信连接的通信信道频率不同。
91.本发明具有第三处理模块,与第一模块和第二模块相连,如图6所示,包括,主控单元,富媒体数据存储单元,富媒体数据管理单元及网络通信单元,其中,主控单元采用双核cortexa9架构处理器,富媒体数据存储单元,实现位置信息、时间信息、待识别车辆的图像信息、视频流信息、车牌号图像、图像识别后的车牌信息,其中除图像信息和视频流信息以外,其它数据信息均可作为数据查询索引。
92.数据管理与通信模块,实现对富媒体数据的管理,并使本设备接入车管所的车辆管理平台,实现对数据的查询和远程共享。
93.本发明的第一处理模块不仅能获取车牌图像,并且,还根据预先设定的,特定范围及图像像素的对应关系,获取车辆在范围中的位置信息。并且,生成范围内所有车辆车身的位置矩阵队列数据。
94.本发明具备相控阵天线模块和移相器阵列,具有无线波束合成与波束车辆跟踪功能。
95.本发明根据第一处理模块获取的每辆车在区域中的位置,控制无线波束指向并跟踪车身区域。
96.本发明相邻的无线波束与车载电子标签的通信信道频率不同,避免了设备与多标签通信过程中的空中链路数据碰撞造成的识别错误。
97.本发明通过确定的同一车辆车牌号信息与电子标签的车牌信息的比对结果辨识车牌真伪,且具有多车并行识别能力。
98.本发明设备具用卫星定位模块及富媒体存储与管理单元。富媒体数据存储单元,实现位置信息、时间信息、待识别车辆的图像信息、视频流信息、车牌号图像、图像识别后的车牌信息,其中除图像信息和视频流信息以外,其它数据信息均可作为数据查询索引。数据管理与通信模块实现对富媒体数据的管理,并使本设备接入车管所的车辆管理平台,实现对数据的查询和远程共享。
99.本发明实施方式中所有数据的采集和结果判定在数据源侧完成,车牌真伪识别过程无需云端参与控制,采用多路图像识别和多路波束跟踪电子标签射频并行识别技术,解
决了上述现有识别方法存在的问题,通过对同一车辆号牌信息与电子标签车牌信息的对比验证,实现复杂路况下多车辆车牌真伪的快速、准确识别。
100.图7为根据本发明优选实施方式的一种摄像头边缘计算装置结构图。
101.如图7所示,本发明提供一种摄像头边缘计算装置,装置包括:
102.初始单元701,用于获取目标通行区域内的包括多个车辆的区域图像,基于区域图像,获取目标通行区域内每个车辆的车辆图像,分别确认区域图像中的每个车辆在目标通行区域中的位置信息,获取每个车辆的定位信息;
103.优选地,初始单元701还用于,通过单一摄像头或摄像头矩阵获取目标通行区域内的包括多个车辆的区域图像。
104.优选地,初始单元701用于,分别确认区域图像中的每个车辆在目标通行区域中的位置信息,还用于:
105.获取区域图像的区域像素特征以及位置参数;
106.获取目标通行区域内每个车辆的车辆图像的像素特征;
107.根据每个车辆的车辆图像的像素特征与区域图像的区域像素特征的对应关系,确定每个车辆的车辆图像的位置参数,获取每个车辆的车辆图像在在目标通行区域中的位置信息。
108.本发明采集车辆通行区域中特定范围内的图像;其中,第一处理模块,用于对采集到的图像进行模式识别,获取图像中的车辆车身图像。根据车辆车身图像,获取设置于车身上的车牌图像,根据车牌图像,识别出车牌信息。并且,根据预先设定的,特定范围及图像像素的对应关系,获取车辆在范围中的位置信息。并且,生成范围内所有车辆车身的位置矩阵队列数据。
109.第一获取单元702,用于基于每个车辆的车辆图像获取每个车辆图像对应的车牌图像,基于目标车辆的车牌图像,获取目标车辆的第一车牌号码信息;
110.第二获取单元703,用于基于目标车辆的定位信息,通过控制无线波束信号指向并跟踪目标车辆的车身,建立与目标车辆的电子标签的通信连接,获取目标车辆的电子标签记载的第二车牌号码信息;
111.本发明的相控阵天线模块,由若干天线单元组成,用于无线波束的合成,完成射频信号收发功能。
112.本发明的移相器阵列,由若干个数控移相器组成,每个移相器与天线单元相连,用于改变加载到相控阵天线模块中天线单元的信号相位,以实现无线波束的合成与指向控制。
113.本发明的射频信号处理模块,与移相器阵列相连,用于实现信号的增益控制、数据调制、解调及数字信号与模拟信号的变换。
114.本发明的第二处理模块,与第一处理模块、移相器阵列、射频信号处理模块相连接。其功能是,根据从第一处理模块获取的车身位置矩阵队列数据,及移相参数矩阵控制移相器模块改变相控阵天线模块的无线波束指向,使其跟踪待识别车辆的车身范围,需要说明的是,无线波束为多个。通过射频信号处理模块完成与待识别车辆车身上的电子标签的通信功能,进而完成电子标签的车牌信息识别功能。
115.优选地,第二获取单元703用于,通过控制无线波束信号指向并跟踪目标车辆的车
身,还用于:
116.通过相控阵天线模块的多个天线单元合成初始无线波束信号;
117.通过移相器阵列的多个数字移相器改变与每个数字移相器相连接的天线单元信号相位,完成无线波束信号的合成,并基于目标车辆的定位信息控制合成后的无线波束信号的指向;
118.通过射频信号处理模块对合成后的无线波束信号进行处理,包括:增益控制、数据调制以及数据解调;并将经过处理后的数字的无线波束信号转换为模拟的无线波束信号。
119.优选地,相控阵天线模块包括天线阵列,对无线波束信号指向的调节范围为:纵向10米至30米以及横向12米内。
120.结果单元704,用于对第一车牌号码信息和第二车牌号码信息进行一致性验证,根据验证结果确定车辆身份的真伪。
121.优选地,装置还包括检索单元,用于:
122.对目标车辆的定位信息、时间信息、车辆图像、车牌图像、车牌号码信息进行存储;
123.对目标车辆的定位信息、时间信息、车牌号码信息进行查询。
124.本发明的第三处理模块,与第二处理模块相连接,获取第二模块生成识别结果和取证信息,通过卫星定位模块,获取设备的位置信息及时间信息,并由主控单元完成富媒体数据的管理及与车辆管理平台的通信与共享。其中的富媒体数据存储单元,实现位置信息、时间信息、待识别车辆的图像信息、视频流信息、车牌号图像、图像识别后的车牌信息,其中除图像信息和视频流信息以外,其它数据信息均可作为数据查询索引。其中的数据管理与通信模块;实现对富媒体数据的管理,并使本设备接入车管所的车辆管理平台,实现对数据的查询和远程共享。
125.优选地,还包括:目标车辆为多个车辆;
126.指向不同目标车辆的无线波束信号与电子标签的多个通信连接的通信信道频率不同。
127.本发明优选实施方式的一种摄像头边缘计算装置700与本发明优选实施方式的一种摄像头边缘计算方法100相对应,在此不再进行赘述。
128.已经通过参考少量实施方式描述了本发明。然而,本领域技术人员所公知的,正如附带的专利权利要求所限定的,除了本发明以上公开的其他的实施例等同地落在本发明的范围内。
129.通常地,在权利要求中使用的所有术语都根据他们在技术领域的通常含义被解释,除非在其中被另外明确地定义。所有的参考“一个//该[装置、组件等]”都被开放地解释为装置、组件等中的至少一个实例,除非另外明确地说明。这里公开的任何方法的步骤都没必要以公开的准确的顺序运行,除非明确地说明。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1