一种智能化配置车辆虚拟踏板计算方法、系统和车辆与流程
1.本发明涉及车辆控制技术领域,尤其涉及一种智能化配置车辆虚拟踏板计算方法、系统和车辆。
背景技术:
2.伴随汽车工业的飞速发展,消费者对汽车的期待不再是单纯的交通工具,智能化配置已逐步成为消费者购车的重要考量,促使自动驾驶、自适应巡航、自动泊车等智能化功能的产生、发展。
3.传统车型中,控制系统依据真实踏板信号判断驾驶员意图、设置动力源扭矩、升降挡等,对于应用了自动驾驶、自适应巡航、自动泊车等智能化配置的车型,上述功能激活时真实踏板值一般为0,因此需要设置一虚拟踏板值作为动力源扭矩目标设定、升降挡逻辑的输入。
技术实现要素:
4.本发明的目的是提供一种智能化配置车辆虚拟踏板计算方法,应对智能化功能激活时对虚拟踏板的需求。
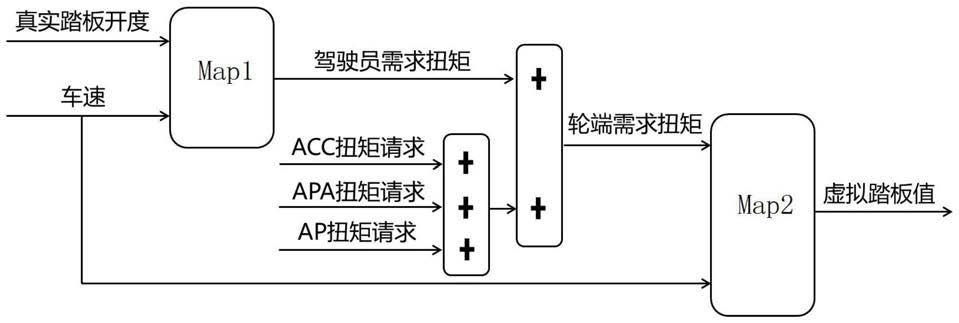
5.为实现上述目的,本发明提供了一种智能化配置车辆虚拟踏板计算方法,步骤包括:获取当前真实踏板开度和车速,通过查询驾驶员需求扭矩、真实踏板开度和车速关系表map1得到驾驶员需求扭矩;获取当前智能化场景的扭矩请求的扭矩值,并将其与驾驶员需求扭矩相加得到轮端需求扭矩;根据轮端需求扭矩、当前车速查询轮端需求扭矩、车速和工况虚拟踏板值关系表map2,得到当前的工况虚拟踏板值。
6.进一步,智能化场景为自适应巡航或自动泊车或自动驾驶。
7.进一步,所述获取当前真实踏板开度,具体步骤为:判断真实踏板开度是否超过预设开度阈值,若是,则识别到驾驶员操作踏板并获取当前真实踏板开度;否则,则真实踏板开度为0,驾驶员需求扭矩为0。
8.本发明还提供了一种智能化配置车辆虚拟踏板计算系统,包括存储器和控制器,所述存储器内存储有计算机可读程序,所述计算机可读程序被控制器调用时,能执行所述智能化配置车辆虚拟踏板计算方法的步骤。
9.本发明还提供了一种车辆,包括所述的智能化配置车辆虚拟踏板计算系统。
10.本发明与现有技术相比较具有以下优点:本发明的智能化配置车辆虚拟踏板计算方法、系统和车辆,虚拟踏板值能够作为动力源扭矩目标设定、升降挡等逻辑的输入,应对智能化功能激活时对虚拟踏板的需求。
附图说明
11.图1为本发明智能化配置车辆虚拟踏板计算方法的逻辑图;图2为本发明虚拟踏板应用场景的逻辑图;图3为本发明误差校验的逻辑图;图4为本发明误差校验等高线图;图5为本发明误差校验超限示意图。
具体实施方式
12.下面结合附图对本发明的具体实施方式作进一步说明。
13.参见图1和图2所示,本实施例公开了一种智能化配置车辆虚拟踏板计算方法,步骤包括:获取当前真实踏板开度和车速,通过查询驾驶员需求扭矩、真实踏板开度和车速关系表map1得到驾驶员需求扭矩;获取当前智能化场景的扭矩请求的扭矩值,并将其与驾驶员需求扭矩相加得到轮端需求扭矩;根据轮端需求扭矩、当前车速查询轮端需求扭矩、车速和工况虚拟踏板值关系表map2,得到当前的工况虚拟踏板值。
14.在acc、apa、ap等智能化应用场景,真实踏板无值,采用虚拟踏板值作为扭矩分配、驾驶性性处理、档位切换等功能模块的输入。利用车速信号、轮端需求扭矩(源自智能化配置的扭矩请求,此时真实踏板开度为0;当驾驶员需求有变化时,比如超车,会操作踏板,此时真实踏板开度不为0)依照预设的轮端需求扭矩、车速和工况虚拟踏板值关系表map2表进行插值,得出此工况虚拟踏板值。
15.驾驶员需求扭矩、真实踏板开度和车速关系表map1和轮端需求扭矩、车速和工况虚拟踏板值关系表map2通过标定得到,一般由动力性、驾驶性标定工程师输入。首先以一定梯度的真实踏板值(0%到100%)与车速值(车速从0到最大设计车速)作为输入,查驾驶员需求扭矩、真实踏板开度和车速关系表map1得出各工况驾驶员需求扭矩;其次建立不同车速维度真实踏板与轮端需求扭矩的对应关系,利用车速、轮端需求扭矩反查真实踏板值作为虚拟踏板的初标值。
16.在本实施例中,智能化场景为自适应巡航(acc)或自动泊车(apa)或自动驾驶(ap)。
17.在本实施例中,所述获取当前真实踏板开度,具体步骤为:判断真实踏板开度是否超过预设开度阈值,若是,则识别到驾驶员操作踏板并获取当前真实踏板开度;否则,则真实踏板开度为0,驾驶员需求扭矩为0。
18.参考图2,acc、apa、ap等智能化场景功能激活时,控制器只响应上述功能模块所请求的扭矩,屏蔽真实加速踏板值。以避免此类场景因真实踏板信号波动对功能造成干扰。此设定并非完全忽略加速踏板的信号,当控制器检测到真实踏板开度超过一定阈值时,将识别为驾驶员需求有变化,系统会依据真实踏板开度查驾驶员需求扭矩、真实踏板开度和车速关系表map1得出并执行驾驶员新的扭矩需求。在acc、apa、ap等功能被激活的场景,真实踏板开度为0,驾驶员需求扭矩为0,acc、apa、ap等功能所请求的轮端扭矩、车速作为输入查
轮端需求扭矩、车速和工况虚拟踏板值关系表map2,得出此工况虚拟踏板值,用于后续的动力总成扭矩分配、驾驶性性处理、换挡等功能模块的输入。
19.虚拟踏板与真实踏板误差校验:所述的虚拟踏板与真实踏板误差校验,是指全工况(特征车速、真实油门开度)计算真实踏板开度与虚拟踏板值的误差,用于评价轮端需求扭矩、车速和工况虚拟踏板值关系表map2坐标轴中车速、轮端需求扭矩划分合理性。参见图3所示,以一定梯度的真实踏板值与车速值作为输入,查表得出不同工况下虚拟踏板值与真实踏板值误差。参见图4所示,以轮端需求扭矩tq、车速spd作为xy坐标,误差值err为z坐标绘制误差等高线图,观察误差分布情况。参见图5所示,可通过设置不同误差范围所对应的色块,利于观察超限的误差分布。然后通过分析误差校验结果,调整轮端需求扭矩、车速和工况虚拟踏板值关系表map2中坐标特征值、map预设值,重复误差校验直至全工况误差在合理范围内。依据图5的误差分布情况,在误差超限区域增加轮端需求扭矩、车速和工况虚拟踏板值关系表map2的车速、轮端需求扭矩的坐标密度;对于正误差,将轮端需求扭矩、车速和工况虚拟踏板值关系表map2对应区域的预设值调大,对于负误差,将轮端需求扭矩、车速和工况虚拟踏板值关系表map2对应区域的预设值调小。示例:参见图5,存在两个显著的误差超限值的区域(本例定义误差区间为
±
1.5%),区域41误差大于+1.5%,区域42误差小于
‑
1.5%,故应将车速100
‑
140、扭矩700
‑
1750区间的虚拟踏板map预设值加大;应将车速10
‑
40、扭矩2250
‑
3250区间的虚拟踏板map预设值减小。重复执行误差校验、虚拟踏板map2调整动作,直至全工况误差均分布在合理范围内。
20.本实施例还公开了一种智能化配置车辆虚拟踏板计算系统,包括存储器和控制器,所述存储器内存储有计算机可读程序,所述计算机可读程序被控制器调用时,能执行上述智能化配置车辆虚拟踏板计算方法的步骤。
21.本实施例还公开了一种车辆,包括上述的智能化配置车辆虚拟踏板计算系统。
22.本发明的智能化配置车辆虚拟踏板计算方法、系统和车辆,虚拟踏板值能够作为动力源扭矩目标设定、升降挡等逻辑的输入,应对智能化功能激活时对虚拟踏板的需求。
23.以上详细描述了本发明的较佳具体实施例。应当理解,本领域的普通技术人员无需创造性劳动就可以根据本发明的构思作出诸多修改和变化。因此,凡本技术领域中技术人员依本发明的构思在现有技术的基础上通过逻辑分析、推理或者有限的实验可以得到的技术方案,皆应在由权利要求书所确定的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1